
一种船舶辅助泊岸方法和系统.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种船舶辅助泊岸方法和系统.pdf
本发明提供了一种船舶辅助泊岸方法和系统,其特点在于:利用日盲紫外成像法确定船舶相对于泊位的位置信息;同时利用GPS法,采用至少两个GPS接收器,确定船舶相对于泊位的姿态角,可有效地解决在能见度很低时,使船舶在贴近岸边时能安全泊岸。进一步地,本发明的方法和装置中,还可优选地采用归一化自相关算法和数据融合算法对日盲紫外成像模块和GPS信号接收模块所接收到的坐标数据以及角度数据进行整合处理,以提高定位精度。通过引用本发明所述船舶辅助泊岸方法和系统,能明显解决现行技术下船舶在雾天靠泊难度大以及现行技术中船舶引航靠

一种船舶辅助泊岸方法和系统.pdf
本发明提供了一种船舶辅助泊岸方法和系统。该泊岸方法采用日盲紫外光成像法,包括采用至少两个日盲紫外光成像模块,根据其从预先在岸上设置的日盲紫外光源阵列所接收的光信号,计算船舶在泊岸过程中,相对于港口泊位岸线的位置和姿态。进一步地,当采用三个以上日盲紫外光成像模块时,本发明的方法和装置采用归一化自相关算法以及数据融合算法,用以提高船舶位置和姿态数据的精度。通过引用本发明所述船舶辅助泊岸方法和系统,能明显解决现行技术下船舶在雾天靠泊难度大以及现行技术中船舶引航靠泊装置受天气、环境等影响大的问题。

一种船舶辅助驾驶数据的处理方法和系统.pdf
本发明公开了一种船舶辅助驾驶数据的处理方法和系统,所述方法包括以下步骤:获取驾驶员的头部视频数据;根据头部视频数据计算驾驶员的视觉盲区位置信息;根据视觉盲区位置信息获取视觉盲区位置的视频数据;对视觉盲区位置的视频数据内的船舶信息和周围环境信息进行处理;将处理后的船舶信息和周围环境信息发送到LED显示屏进行显示。本发明能使得LED显示屏显示的视频图像跟随驾驶员视角方向的变化而变化,从而保证显示的视频图像与驶员视角方向的图像相匹配,以提高驾驶员对盲区位置环境信息的判断速度和准确性,降低事故发生的概率。本发明可

一种基于UWB的船舶靠泊辅助方法和系统.pdf
本发明提供一种基于UWB的船舶靠泊辅助方法和系统,所述系统包括数据采集平台、数据处理平台和数据显示平台;方法包括:1、数据采集模块实时采集UWB节点信息,并将信息发送到数据处理模块;2、数据处理模块实时对步骤1传输的信息进行处理,获得码头和船舶的轮廓、船舶到码头的距离、角度和相对速度以及预警信息;数据存储模块实时保存上述得到的信息,同时通过数据传输模块将信息发送给数据显示平台,外界客户端利用这些信息辅助船舶在码头靠泊;重复步骤1到步骤3,进行数据实时更新,实现码头靠泊辅助功能。本发明通过UWB定位技术、网
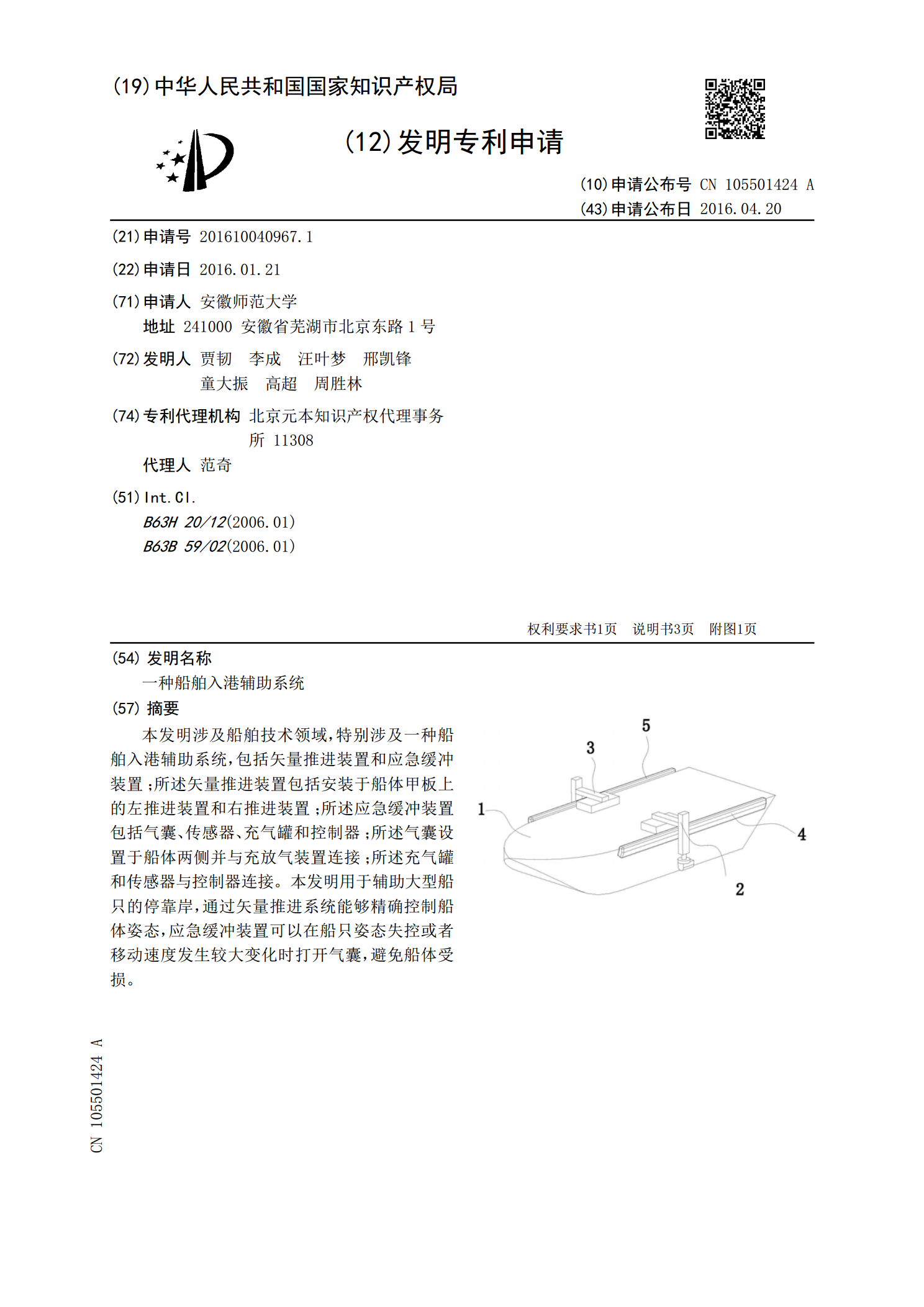
一种船舶入港辅助系统.pdf
本发明涉及船舶技术领域,特别涉及一种船舶入港辅助系统,包括矢量推进装置和应急缓冲装置;所述矢量推进装置包括安装于船体甲板上的左推进装置和右推进装置;所述应急缓冲装置包括气囊、传感器、充气罐和控制器;所述气囊设置于船体两侧并与充放气装置连接;所述充气罐和传感器与控制器连接。本发明用于辅助大型船只的停靠岸,通过矢量推进系统能够精确控制船体姿态,应急缓冲装置可以在船只姿态失控或者移动速度发生较大变化时打开气囊,避免船体受损。