
基于智能无人机伴随系统的车辆辅助驾驶系统.pdf

青团****青吖


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于智能无人机伴随系统的车辆辅助驾驶系统.pdf
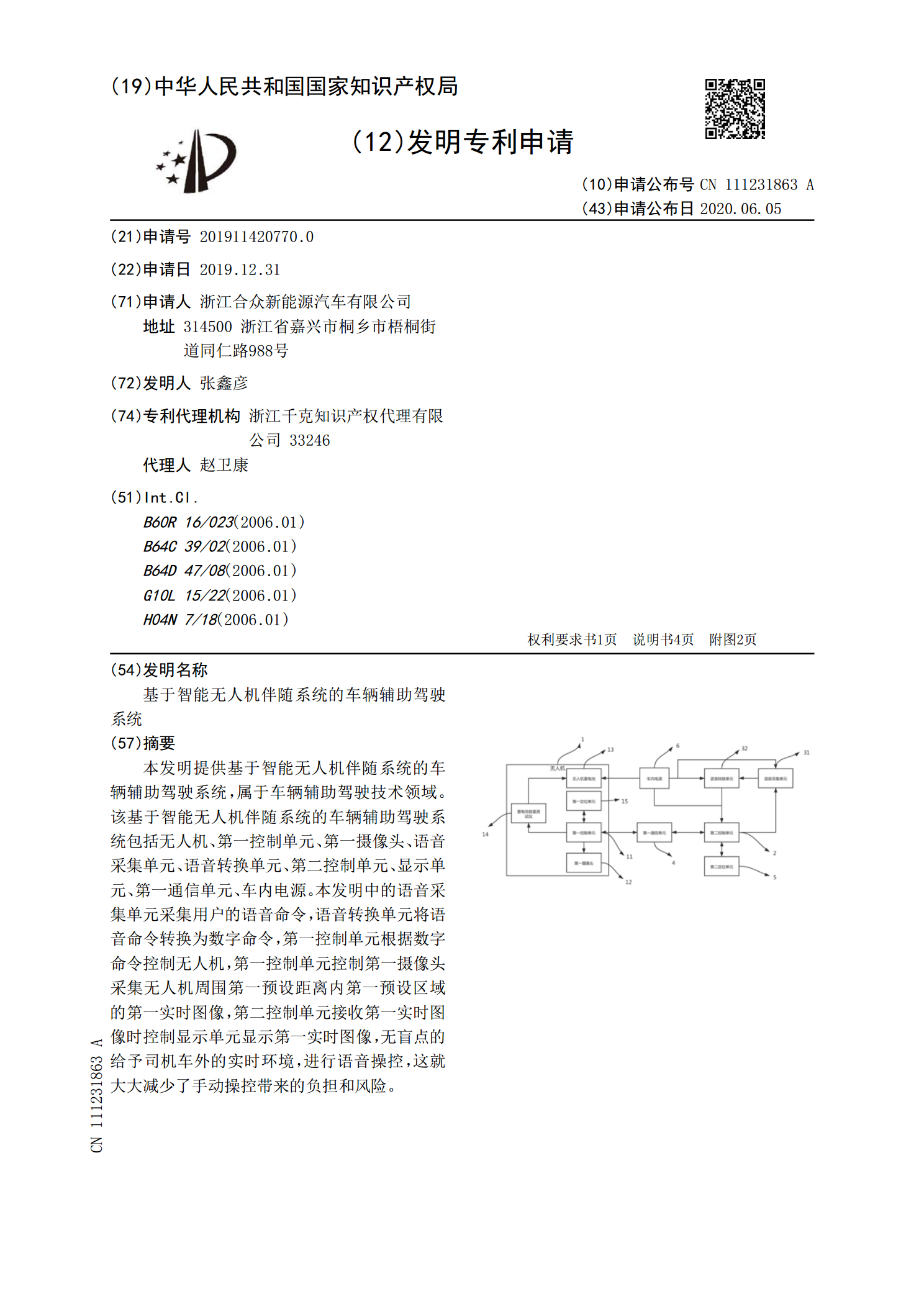
本发明提供基于智能无人机伴随系统的车辆辅助驾驶系统,属于车辆辅助驾驶技术领域。该基于智能无人机伴随系统的车辆辅助驾驶系统包括无人机、第一控制单元、第一摄像头、语音采集单元、语音转换单元、第二控制单元、显示单元、第一通信单元、车内电源。本发明中的语音采集单元采集用户的语音命令,语音转换单元将语音命令转换为数字命令,第一控制单元根据数字命令控制无人机,第一控制单元控制第一摄像头采集无人机周围第一预设距离内第一预设区域的第一实时图像,第二控制单元接收第一实时图像时控制显示单元显示第一实时图像,无盲点的给予司机车

基于深度学习的智能车辆辅助驾驶系统设计.docx
基于深度学习的智能车辆辅助驾驶系统设计基于深度学习的智能车辆辅助驾驶系统设计摘要:近年来,智能车辆技术的快速发展为我们的出行提供了更多的便利和安全。深度学习作为一种强大的机器学习方法,已经在许多领域取得了重大突破。本文提出基于深度学习的智能车辆辅助驾驶系统的设计,旨在通过对车辆前方景物进行实时识别和判断,实现自动驾驶的效果。在该系统的设计过程中,我们使用了卷积神经网络(CNN)和循环神经网络(RNN)来有效地处理车辆所在环境的图像数据和时间序列数据。实验结果表明,该系统能够在复杂交通环境中准确识别交通标志

基于无人机的车辆智能驾驶系统、方法及存储介质.pdf
本发明公开了一种基于无人机的车辆智能驾驶系统、方法及存储介质,包括:无人机子系统,用于获取车辆当前路段交通信息;云端子系统,与所述无人机子系统通信连接,用于接收所述交通信息,根据所述交通信息获取自车附近路段交通信息;车载子系统,与所述无人机子系统、所述云端子系统通信连接,用于接收自车当前路段交通信息以及附近路段交通信息,获取自车行驶路径规划信息,控制自车的运行状态。本发明利用无人机子系统来对环境进行感知,减少了智能驾驶车辆的视野盲区,从而提高了智能驾驶的安全性,同时,在所述无人机子系统的基础上再结合所述云
智能照明系统、智能车辆及其车辆辅助驾驶系统和方法.pdf
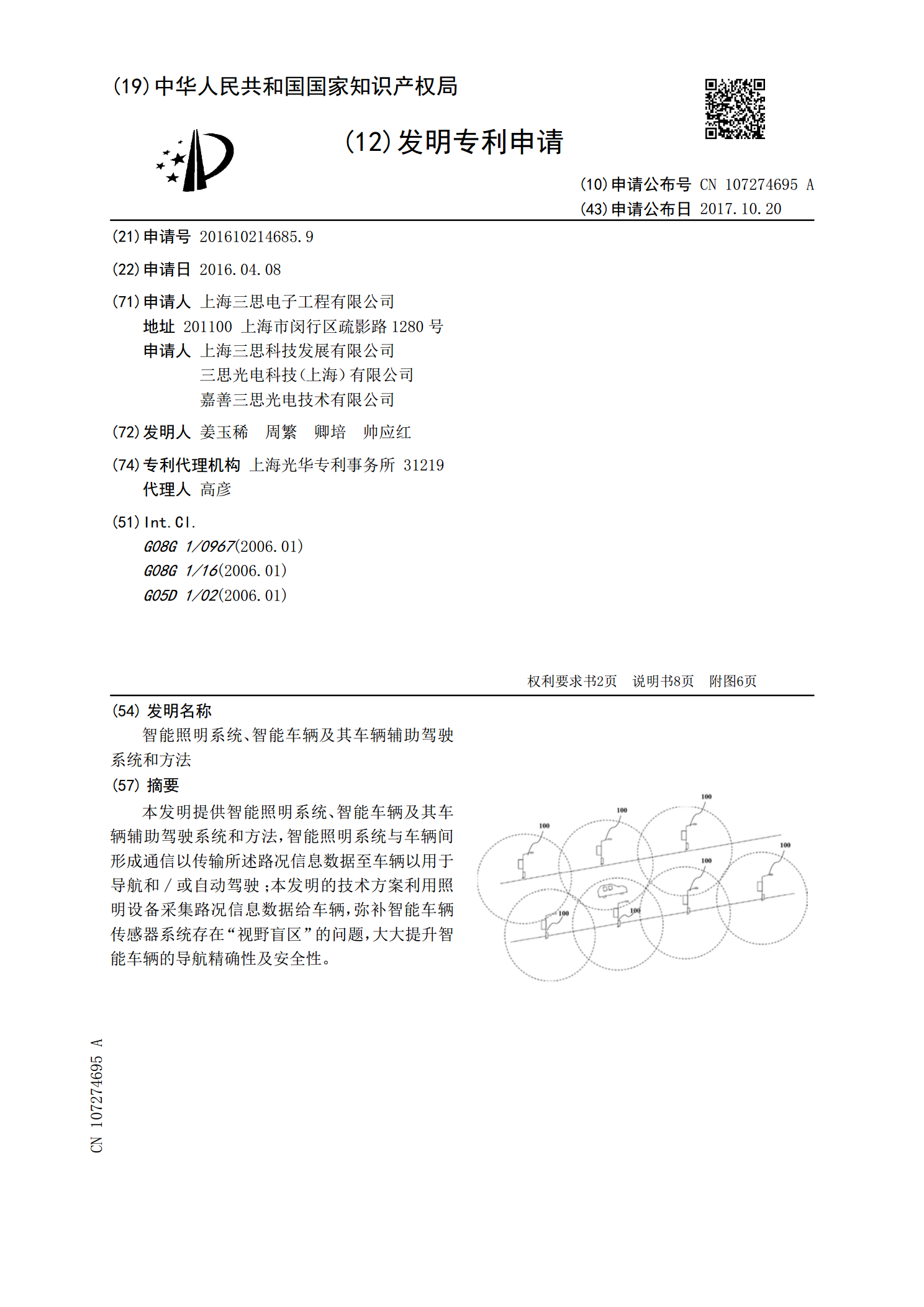
本发明提供智能照明系统、智能车辆及其车辆辅助驾驶系统和方法,智能照明系统与车辆间形成通信以传输所述路况信息数据至车辆以用于导航和/或自动驾驶;本发明的技术方案利用照明设备采集路况信息数据给车辆,弥补智能车辆传感器系统存在“视野盲区”的问题,大大提升智能车辆的导航精确性及安全性。
车辆辅助驾驶方法及车辆辅助驾驶系统.pdf
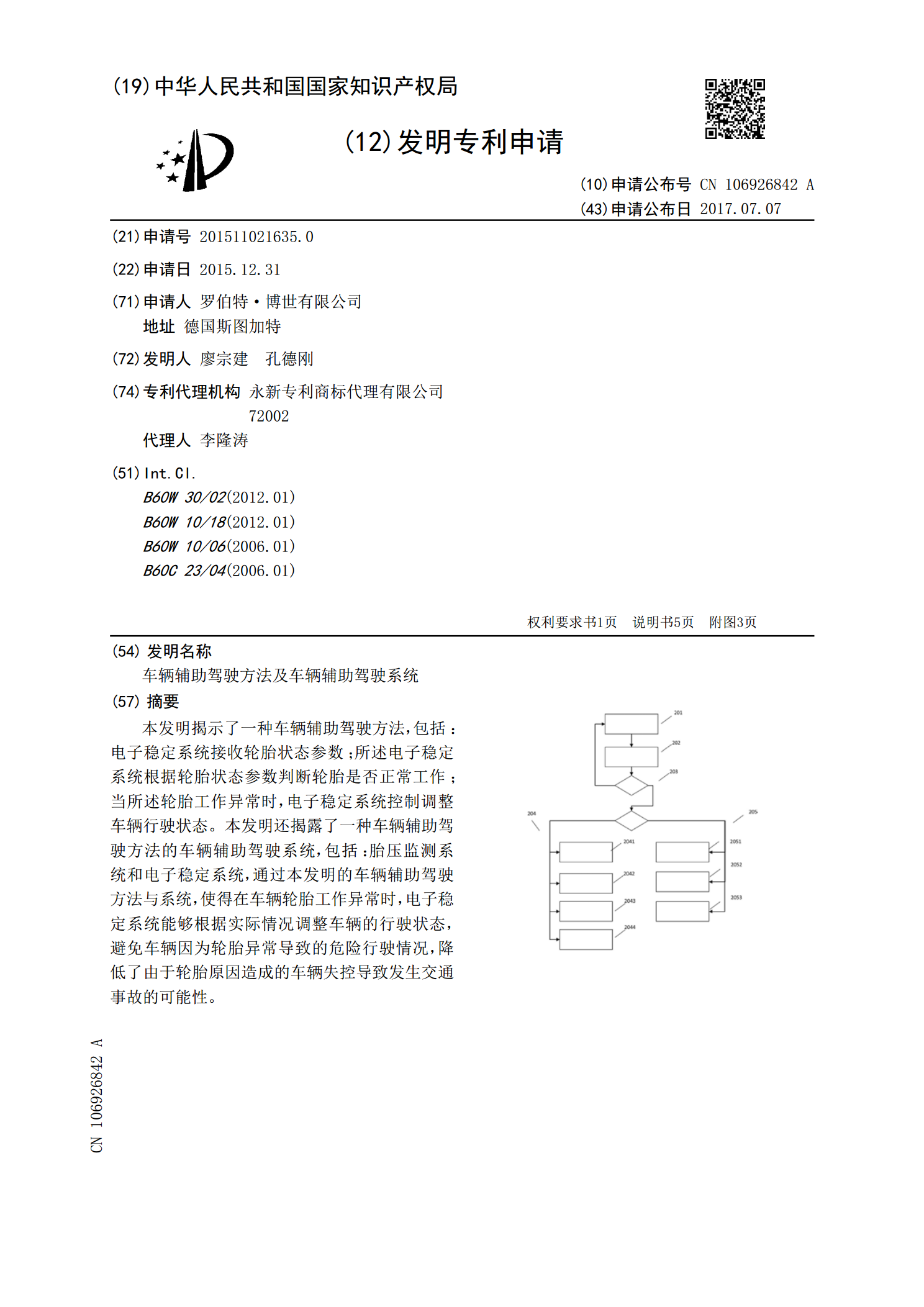
本发明揭示了一种车辆辅助驾驶方法,包括:电子稳定系统接收轮胎状态参数;所述电子稳定系统根据轮胎状态参数判断轮胎是否正常工作;当所述轮胎工作异常时,电子稳定系统控制调整车辆行驶状态。本发明还揭露了一种车辆辅助驾驶方法的车辆辅助驾驶系统,包括:胎压监测系统和电子稳定系统,通过本发明的车辆辅助驾驶方法与系统,使得在车辆轮胎工作异常时,电子稳定系统能够根据实际情况调整车辆的行驶状态,避免车辆因为轮胎异常导致的危险行驶情况,降低了由于轮胎原因造成的车辆失控导致发生交通事故的可能性。