
一种基于特征点标定的智能车定位方法.pdf

努力****采萍


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于特征点标定的智能车定位方法.pdf
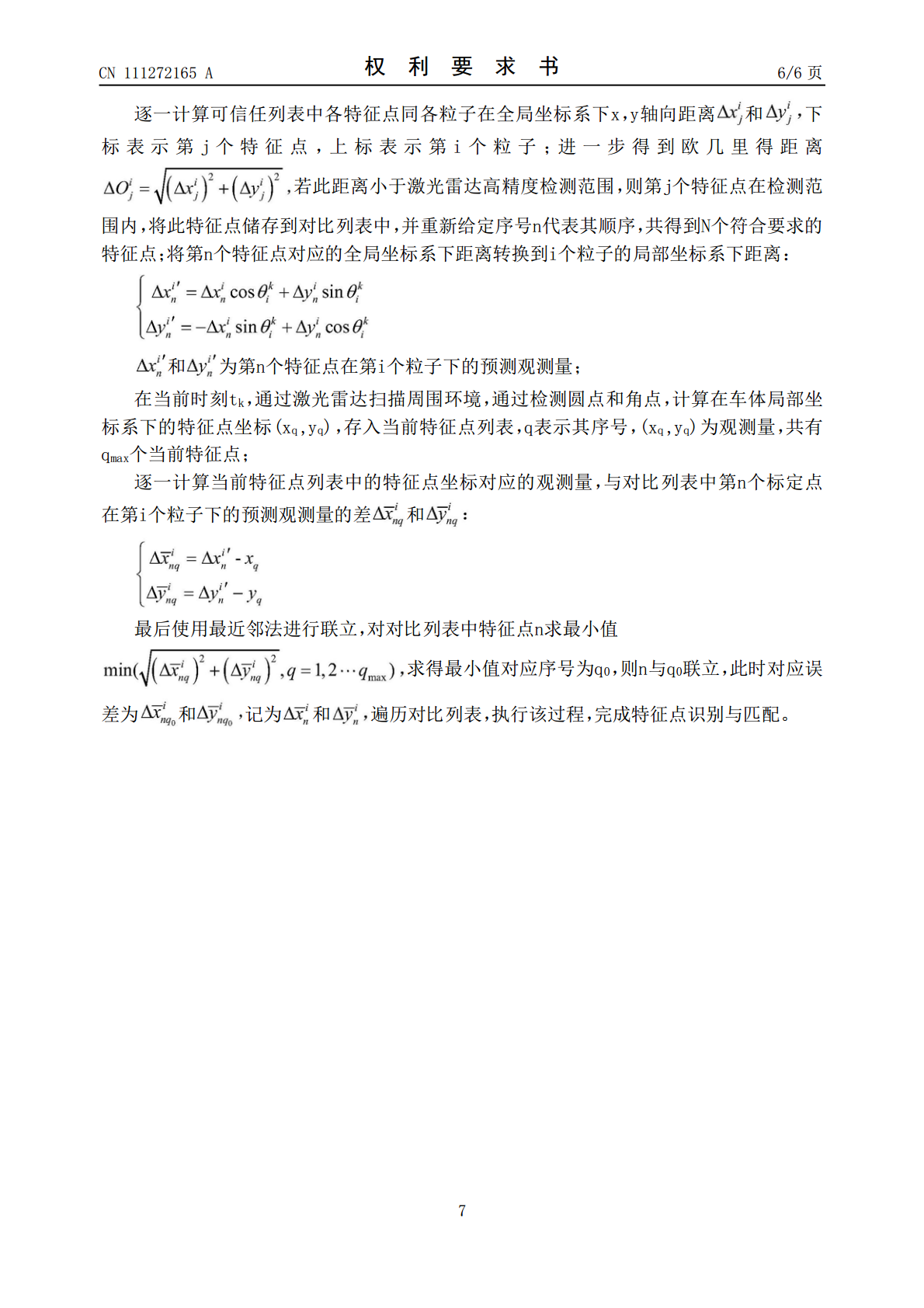
本发明了提供一种基于特征点标定的智能车定位方法,包括:判断智能车是位于盲区还是非盲区;当智能车位于GNSS非盲区,将GNSS信号、里程计数据和惯性测量单元数据组合,通过卡尔曼滤波获取智能车当前位姿,利用激光雷达扫描智能车周围环境,提取角点、圆弧特征并通过处理得到角点、圆心作为特征点,计算特征点的全局坐标和权重存入当前特征点列表;将当前特征点列表中的特征点加入已有特征点列表,将已有特征点列表中满足条件的特征点加入可信任列表;当智能车位于GNSS盲区,使用激光雷达获取周围可信任列表的特征点作为观测量,融合里程

一种智能水下目标定位方法.pdf
本发明涉及一种水下目标定位技术领域,公开了一种智能水下目标定位方法,包括:构建水下目标定位数学模型;利用构建的水下目标定位模型生成大量测试仿真数据,并对数据进行预处理,将预处理后的数据作为训练数据;将训练数据作为输入,输入到神经网络模型;扩展神经网络的全连接层,基于迁移学习算法,利用实际海底定位采集数据对扩展的全连接层参数进行训练,得到训练好的神经网络模型;采集实际水下数据,将水下数据作为神经网络模型的输入,输出结果为水下目标定位坐标。本发明通过建立水下目标定位模型生成训练数据,利用迁移学习算法训练得到神
一种基于点特征和线特征融合的长焦距相机标定方法.pdf
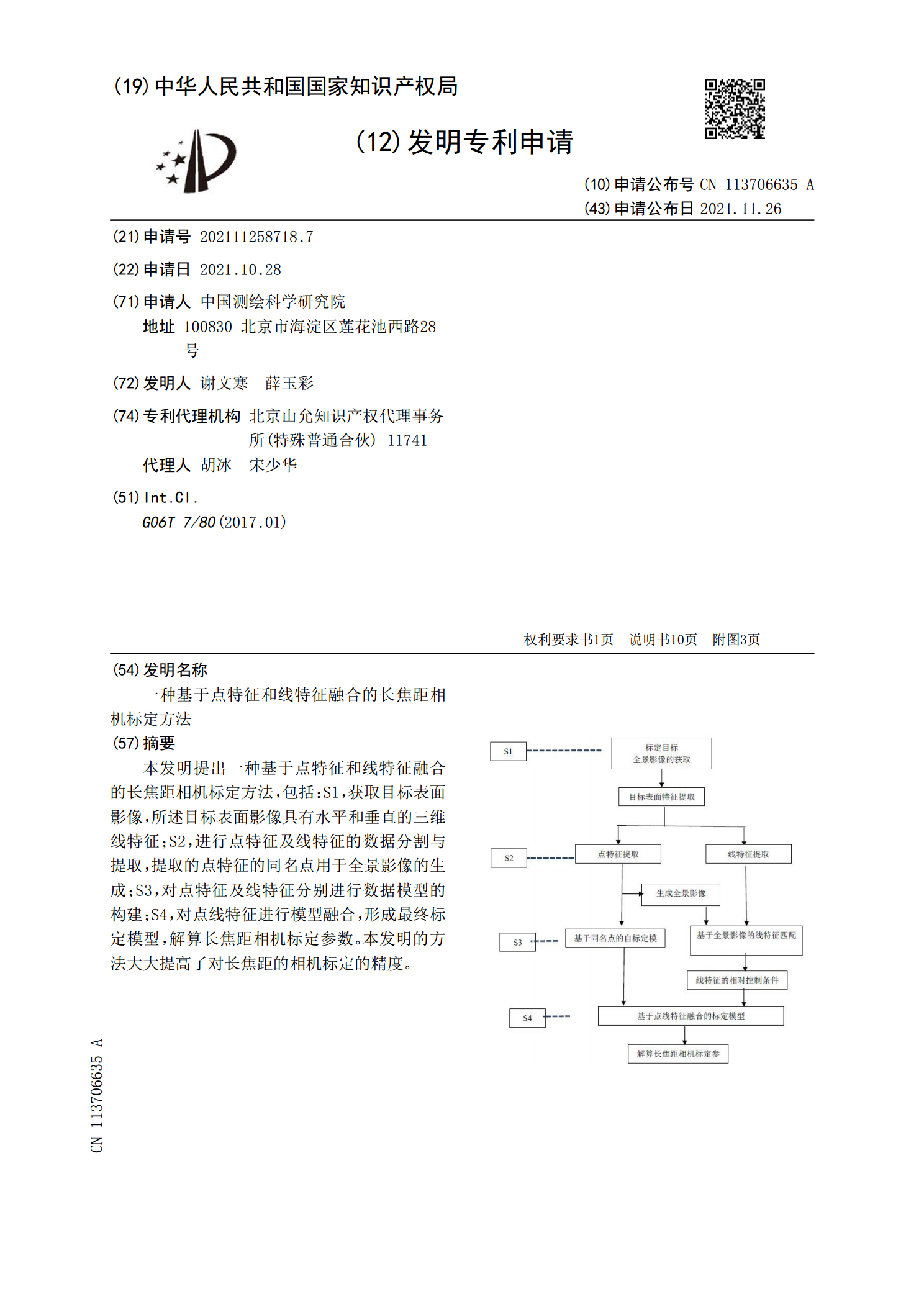
本发明提出一种基于点特征和线特征融合的长焦距相机标定方法,包括:S1,获取目标表面影像,所述目标表面影像具有水平和垂直的三维线特征;S2,进行点特征及线特征的数据分割与提取,提取的点特征的同名点用于全景影像的生成;S3,对点特征及线特征分别进行数据模型的构建;S4,对点线特征进行模型融合,形成最终标定模型,解算长焦距相机标定参数。本发明的方法大大提高了对长焦距的相机标定的精度。

一种基于资产特征的智能路由定位方法和系统.pdf
本发明涉及一种基于资产特征的智能路由定位方法和系统,方法包括以下步骤:采用AI客户资产模型进行聚类分析,得到融资客户资产画像;根据融资客户资产画像以及融资需求,在微服务架构中选择多个抵押融资服务,基于多个抵押融资服务,路由定位到抵质押融资微应用;路由定位到抵质押融资微应用后,得到服务请求,基于服务请求的业务类型、所在地域的区别路由定位前置渠道应用,基于前置渠道应用与第三方系统进行对接。与现有技术相比,本发明具有对接速度快等优点。

一种基于多特征判别的坦克分队战场目标定位方法.docx
一种基于多特征判别的坦克分队战场目标定位方法基于多特征判别的坦克分队战场目标定位方法摘要:在现代战争中,坦克分队的目标定位是一项非常重要的任务。为了提高坦克分队的作战效能,本文提出了一种基于多特征判别的坦克分队战场目标定位方法。该方法将多个特征融合起来进行目标识别和定位,包括视觉特征、声音特征和红外特征。通过实验证明,该方法能够有效地实现坦克分队战场目标的定位,并提高作战效能。关键词:坦克分队;目标定位;多特征判别;视觉特征;声音特征;红外特征1.引言坦克分队的目标定位在现代战争中扮演着重要的角色。通过准