
一种智能水下目标定位方法.pdf

努力****恨风

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能水下目标定位方法.pdf
本发明涉及一种水下目标定位技术领域,公开了一种智能水下目标定位方法,包括:构建水下目标定位数学模型;利用构建的水下目标定位模型生成大量测试仿真数据,并对数据进行预处理,将预处理后的数据作为训练数据;将训练数据作为输入,输入到神经网络模型;扩展神经网络的全连接层,基于迁移学习算法,利用实际海底定位采集数据对扩展的全连接层参数进行训练,得到训练好的神经网络模型;采集实际水下数据,将水下数据作为神经网络模型的输入,输出结果为水下目标定位坐标。本发明通过建立水下目标定位模型生成训练数据,利用迁移学习算法训练得到神
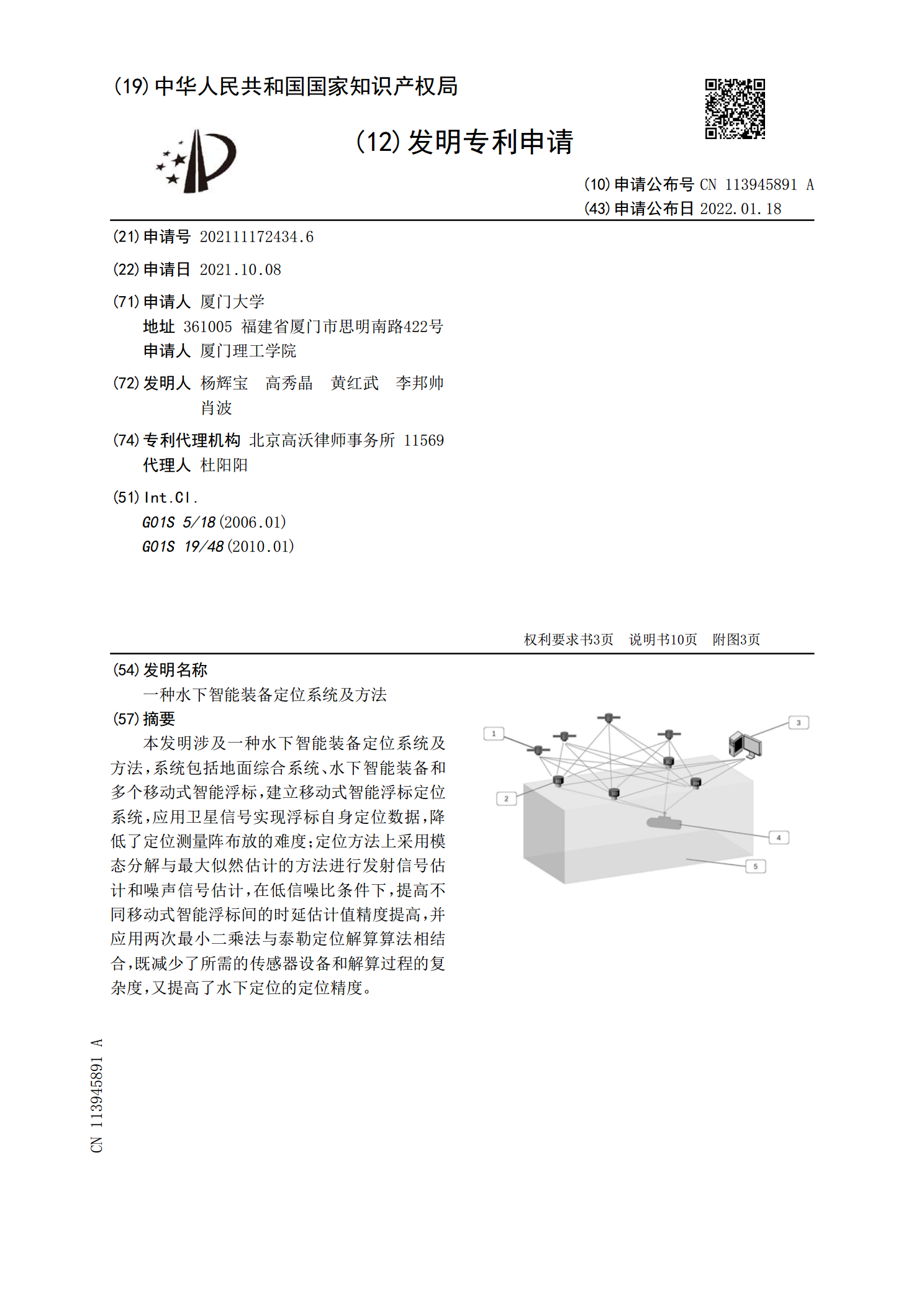
一种水下智能装备定位系统及方法.pdf
本发明涉及一种水下智能装备定位系统及方法,系统包括地面综合系统、水下智能装备和多个移动式智能浮标,建立移动式智能浮标定位系统,应用卫星信号实现浮标自身定位数据,降低了定位测量阵布放的难度;定位方法上采用模态分解与最大似然估计的方法进行发射信号估计和噪声信号估计,在低信噪比条件下,提高不同移动式智能浮标间的时延估计值精度提高,并应用两次最小二乘法与泰勒定位解算算法相结合,既减少了所需的传感器设备和解算过程的复杂度,又提高了水下定位的定位精度。
一种水下小目标定位抓取装置及方法.pdf
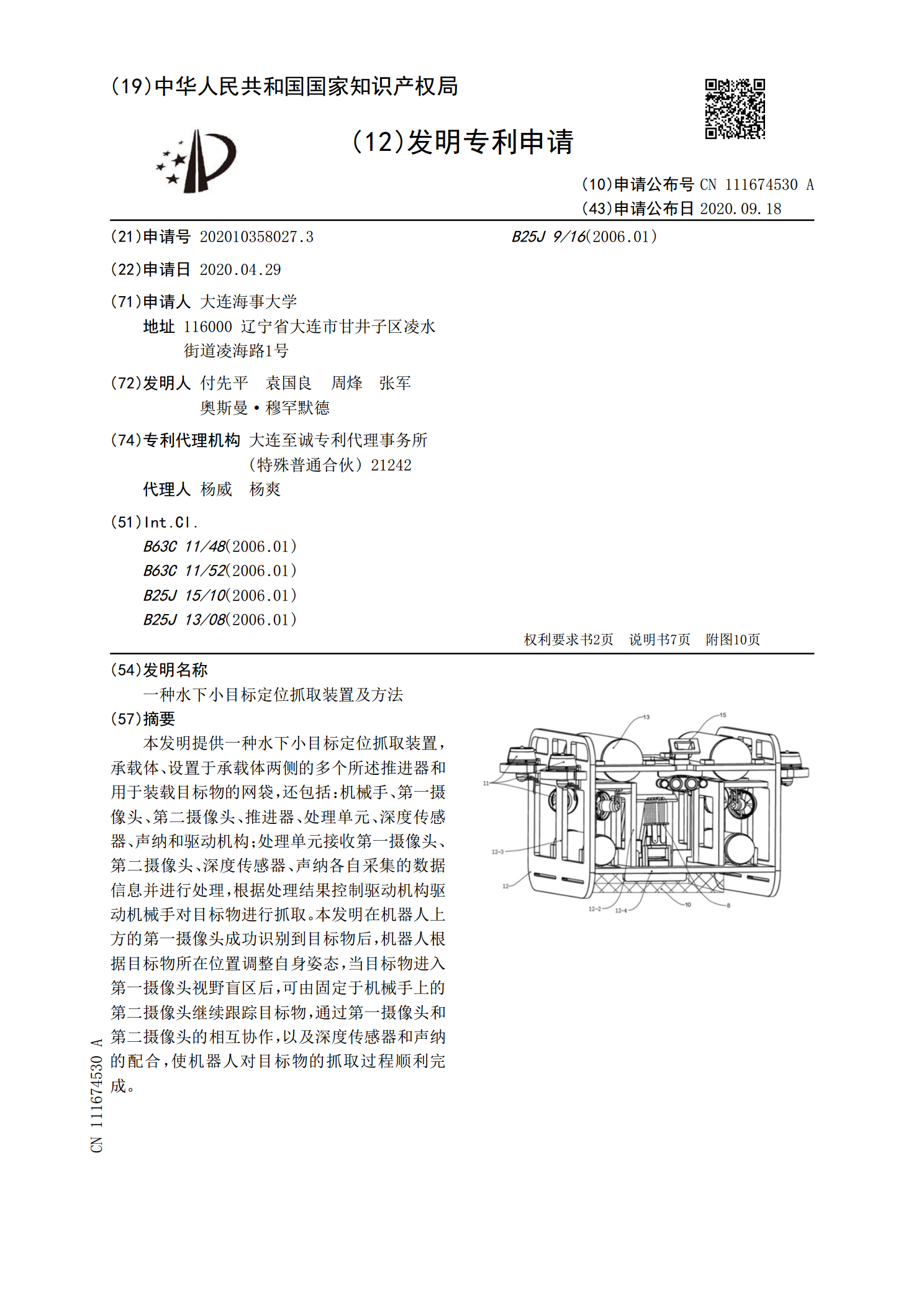
本发明提供一种水下小目标定位抓取装置,承载体、设置于承载体两侧的多个所述推进器和用于装载目标物的网袋,还包括:机械手、第一摄像头、第二摄像头、推进器、处理单元、深度传感器、声纳和驱动机构;处理单元接收第一摄像头、第二摄像头、深度传感器、声纳各自采集的数据信息并进行处理,根据处理结果控制驱动机构驱动机械手对目标物进行抓取。本发明在机器人上方的第一摄像头成功识别到目标物后,机器人根据目标物所在位置调整自身姿态,当目标物进入第一摄像头视野盲区后,可由固定于机械手上的第二摄像头继续跟踪目标物,通过第一摄像头和第二

一种水下航行器的水下信标定位方法.pdf
本发明属于水下定位技术领域,特别涉及一种水下航行器的定位方法。水声信标周期性广播水声信号;水下航行器在未接收到水声信号时,通过自身配备的电子罗盘、深度计以及读取自身的螺旋桨转速信息进行航位推算,并在接收到所搭载的多普勒测速仪测得的的绝对速度观测后,构造海流速度观测量并通过Kalman滤波进行海流速度校正;水下航行器接收到水声信号后,考虑水下声速的未知性、水声信标位置误差及水声信号收发端的时钟漂移,以此基于扩展Kalman滤波算法及期望最大化算法,以水声信号传递时间为观测变量,进行水下航行器的位置更新。本发

用于水下高速目标的定位方法研究.docx
用于水下高速目标的定位方法研究水下高速目标的定位方法研究摘要:水下高速目标的定位一直是水下作业和海洋探测领域的重要问题。本文针对水下高速目标的定位方法进行研究,综述了目前常用的水下高速目标定位技术,并对其优缺点进行了分析。同时,介绍了基于声纳、激光、无线电波等技术的水下高速目标定位方法,并探讨了它们的适用范围和局限性。最后,对未来水下高速目标定位技术的发展趋势进行了展望。关键词:水下高速目标、定位方法、声纳、激光、无线电波引言:随着水下作业和海洋探测的发展,水下高速目标的定位成为了一个重要的问题。水下高速