
基于车路协同的自动驾驶控制方法及系统.pdf

Th****s3

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于车路协同的自动驾驶控制方法及系统.pdf
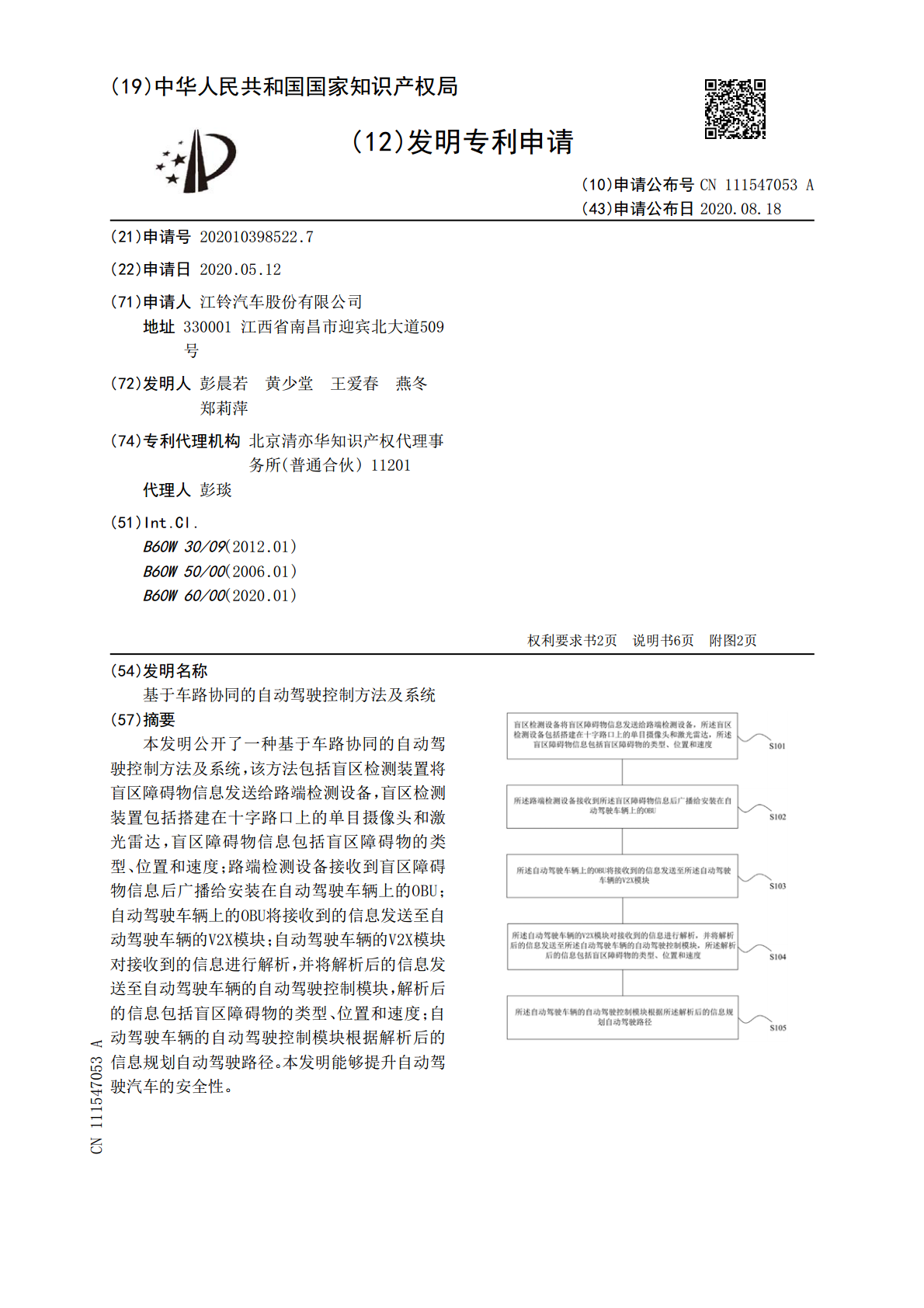
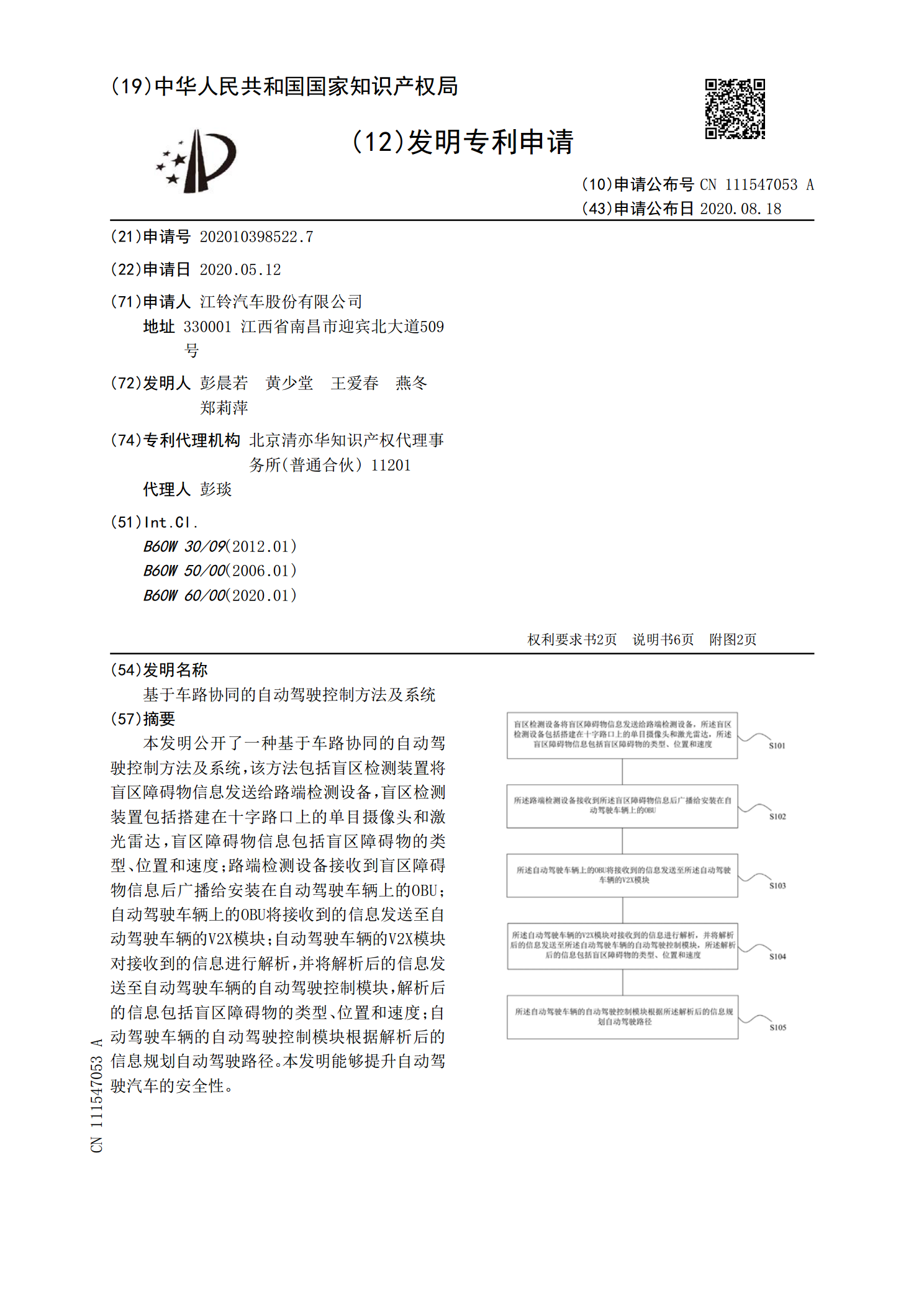
本发明公开了一种基于车路协同的自动驾驶控制方法及系统,该方法包括盲区检测装置将盲区障碍物信息发送给路端检测设备,盲区检测装置包括搭建在十字路口上的单目摄像头和激光雷达,盲区障碍物信息包括盲区障碍物的类型、位置和速度;路端检测设备接收到盲区障碍物信息后广播给安装在自动驾驶车辆上的OBU;自动驾驶车辆上的OBU将接收到的信息发送至自动驾驶车辆的V2X模块;自动驾驶车辆的V2X模块对接收到的信息进行解析,并将解析后的信息发送至自动驾驶车辆的自动驾驶控制模块,解析后的信息包括盲区障碍物的类型、位置和速度;自动驾驶
用于车路协同自动驾驶的控制方法、路侧设备、云控平台和系统.pdf
本公开提供了一种用于车路协同自动驾驶的控制方法、装置、系统、电子设备、路侧设备、路侧系统、车辆、云控平台和介质,涉及人工智能技术领域,尤其涉及自动驾驶和智能交通技术领域。实现方案为:确定在车辆的行驶方向上车辆的前方是否存在感知盲区;响应于确定在车辆的行驶方向上车辆的前方存在感知盲区,从路侧设备接收车辆所对应的预设范围内的全量交通对象以及所述全量交通对象中各个交通对象的运动信息;从所接收的所述全量交通对象中确定位于所述感知盲区内的至少一个干预交通对象;以及基于所述至少一个干预交通对象及其相关信息,确定相应的
车路协同自动驾驶方法及高效运输系统.pdf
本发明车路协同自动驾驶方法及高效运输系统,属于自动驾驶领域,目的是提高道路的通行能力。高效运输系统,由道路系统和车辆构成;车辆上配置有车载车路协同终端;道路系统包括路网和交通调度系统;路网包括若干个交叉路口和相邻两个交叉路口之间的路段;交通调度系统包括分布于路段的路侧监控单元、交叉路口的交叉口调度单元;路侧监控单元定位车辆,对驾驶行为进行决策,发送给车载车路协同终端;交叉口调度单元对到达交叉口的车辆做出路径调度决策。通过路侧监控单元精确定位车辆,交叉口调度单元对交叉路口的车辆进行调度,实现车路协同,大幅提

基于车路协同的自动驾驶数字孪生支持系统.pdf
本发明公开了基于车路协同的自动驾驶数字孪生支持系统,包括车载处理终端、道路感知终端以及智慧城市平台;所述道路感知终端用于对道路系统的道路场景信息进行采集处理并传输至车载处理终端;所述车载处理终端与所述道路感知终端交互通讯连接,所述车载处理终端用于接收道路场景信息并根据车辆信息进行分析处理以实现规划车辆行驶轨迹以及自动驾驶控制。发明将车辆的感知认知能力交给道路感知终端完成,由道路系统承担兜底法律责任,控制反馈交给车辆完成,实现技术上的降纬度解耦合,而且在法律责任上也完成了降纬度解耦合,解决当下车载自动驾驶系
自动驾驶与车路协同.pdf