
一种基于惯性导航的室内导盲小车.pdf

俊英****22


1/5

2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于惯性导航的室内导盲小车.pdf
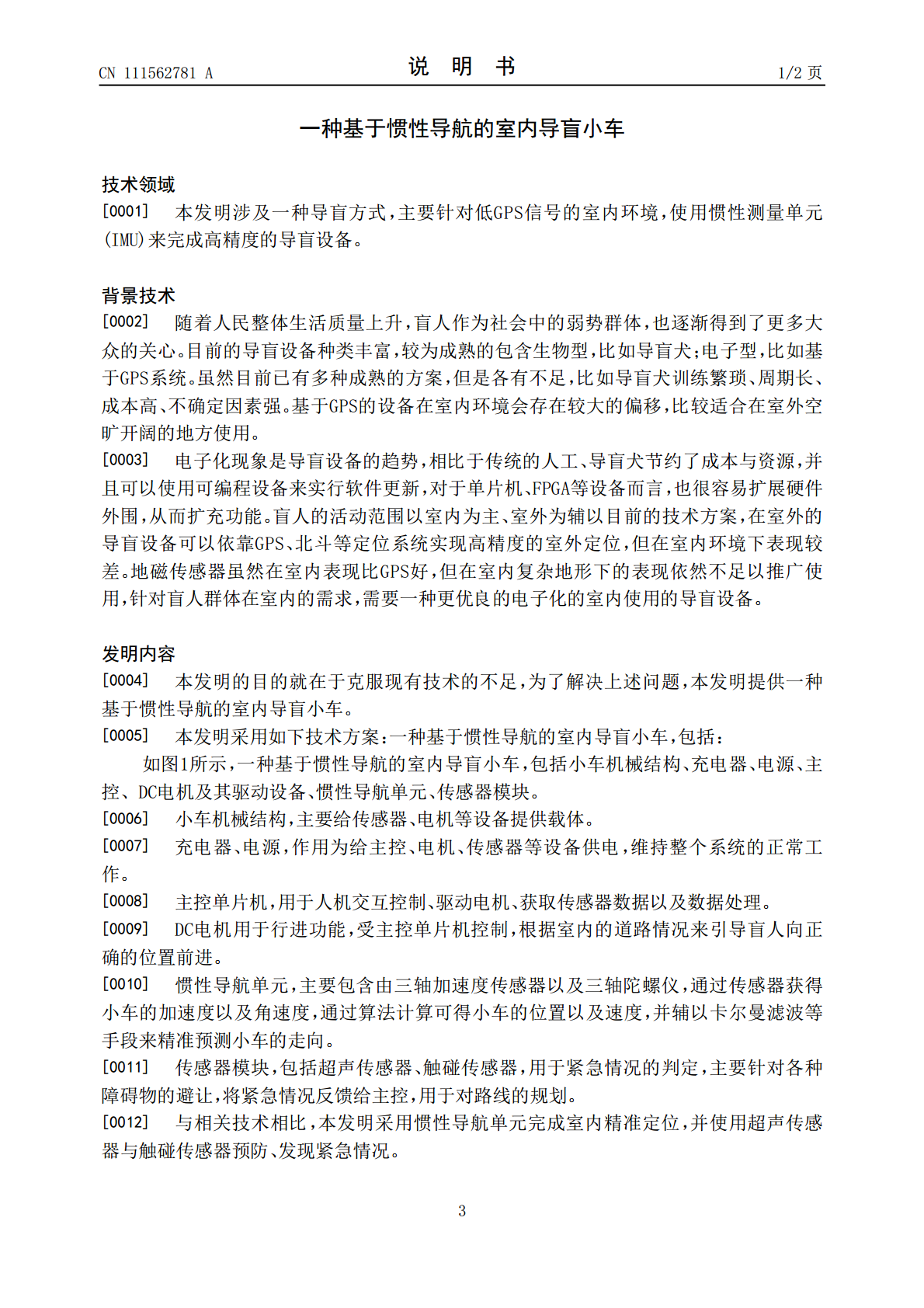
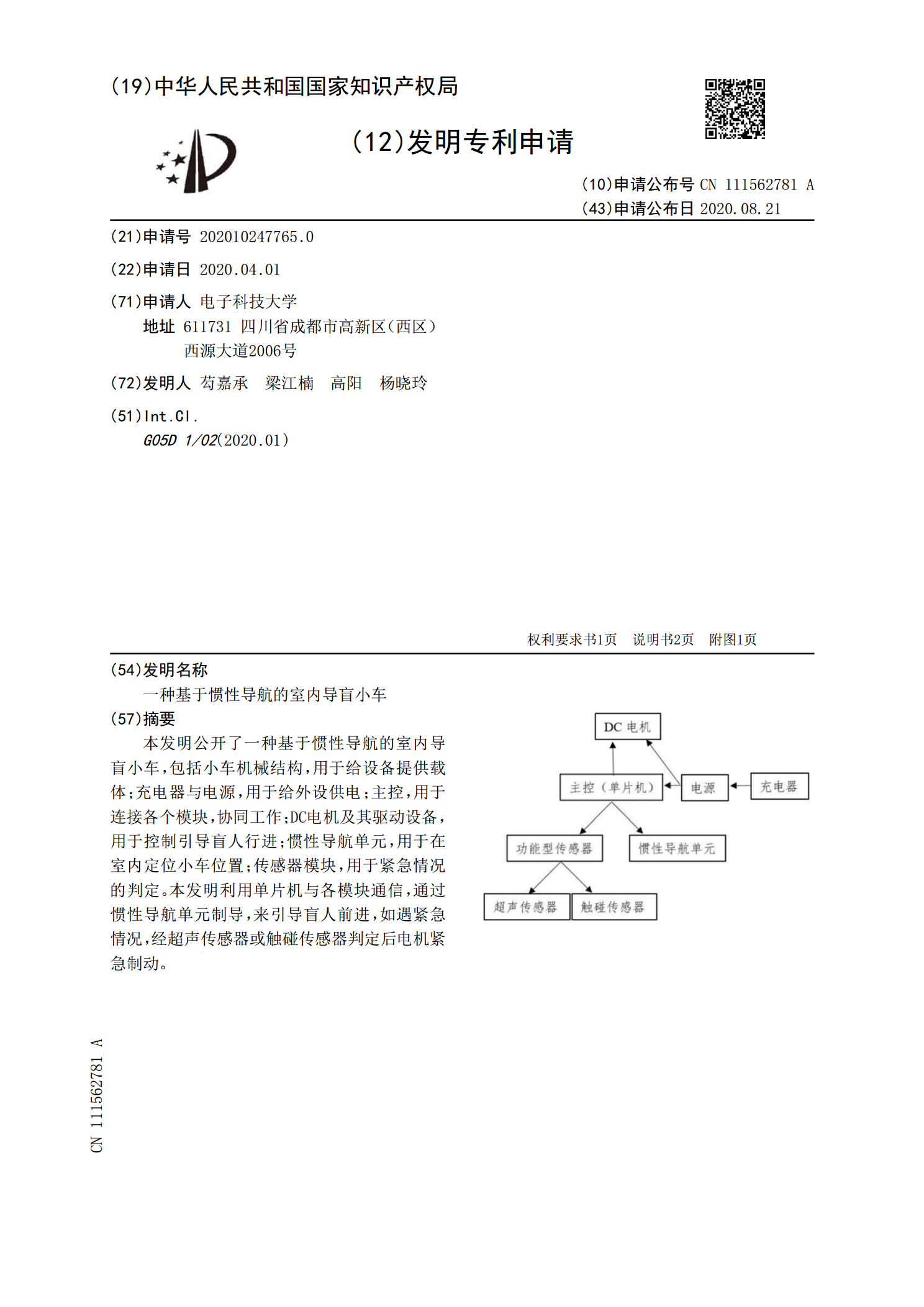
本发明公开了一种基于惯性导航的室内导盲小车,包括小车机械结构,用于给设备提供载体;充电器与电源,用于给外设供电;主控,用于连接各个模块,协同工作;DC电机及其驱动设备,用于控制引导盲人行进;惯性导航单元,用于在室内定位小车位置;传感器模块,用于紧急情况的判定。本发明利用单片机与各模块通信,通过惯性导航单元制导,来引导盲人前进,如遇紧急情况,经超声传感器或触碰传感器判定后电机紧急制动。

基于DSP的室内惯性导航系统.pdf
一种基于DSP的室内惯性导航系统。但是目前轮式运动小车主要采用的导航传感方式有视觉、光电、超声、里程计等,比较容易被外界环境干扰,不能满足广大市场的需求。种基于DSP的室内惯性导航系统,其组成包括:轮式小车1(1)PC终端(2),轮式小车内部具有数字罗盘(3)、加速度计(4)、陀螺仪(5)、核心板和驱动板,核心板分别与数字罗盘、加速度计和陀螺仪连接,核心板通过WIFI信号与PC终端连接,驱动板与核心板连接。本发明应用于基于DSP的室内惯性导航系统。

基于惯性导航的室内定位技术.docx
基于惯性导航的室内定位技术标题:基于惯性导航的室内定位技术摘要:随着室内定位需求的增加,基于惯性导航的室内定位技术逐渐成为研究热点。本论文将重点介绍基于惯性导航的室内定位技术原理、应用场景、算法以及存在的挑战与解决方案。在研究发现中提出了当前技术的不足之处,并进一步讨论了未来发展的方向和前景。通过本论文的研究,可以更好地了解和应用基于惯性导航的室内定位技术。关键词:基于惯性导航、室内定位、技术原理、应用场景、算法、挑战与解决方案、发展方向、前景1.引言室内定位是指在室内环境中准确确定移动设备或者目标物体的
一种基于智能盲杖的室内导盲系统及导盲方法.pdf
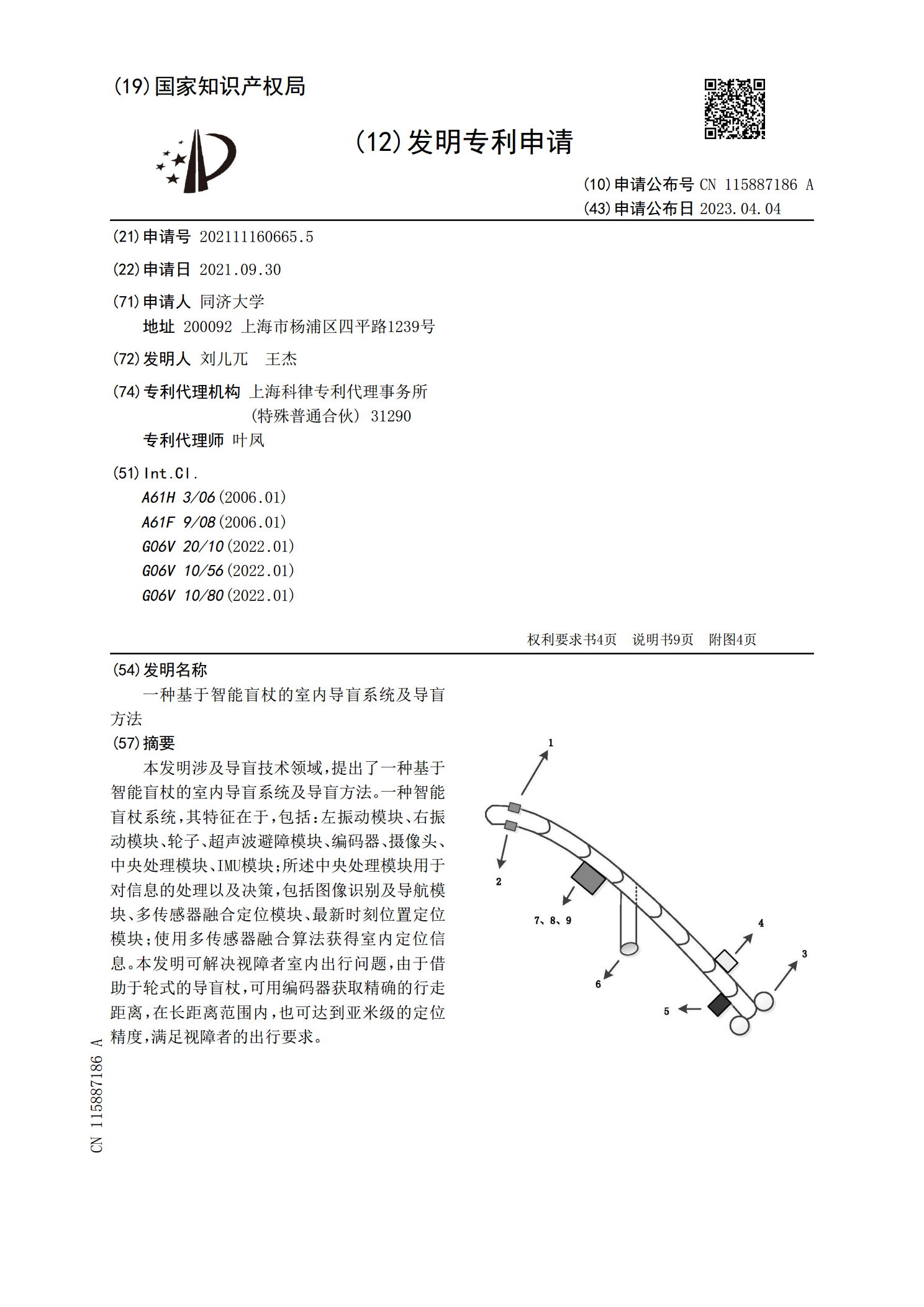
本发明涉及导盲技术领域,提出了一种基于智能盲杖的室内导盲系统及导盲方法。一种智能盲杖系统,其特征在于,包括:左振动模块、右振动模块、轮子、超声波避障模块、编码器、摄像头、中央处理模块、IMU模块;所述中央处理模块用于对信息的处理以及决策,包括图像识别及导航模块、多传感器融合定位模块、最新时刻位置定位模块;使用多传感器融合算法获得室内定位信息。本发明可解决视障者室内出行问题,由于借助于轮式的导盲杖,可用编码器获取精确的行走距离,在长距离范围内,也可达到亚米级的定位精度,满足视障者的出行要求。
基于惯性导航角度补偿的室内激光SLAM方法.pptx
汇报人:/目录0102激光SLAM的基本原理室内激光SLAM的应用场景室内激光SLAM的挑战与解决方案03惯性导航系统的基本原理角度补偿在惯性导航系统中的作用角度补偿的方法与实现04方法概述角度补偿在激光SLAM中的具体应用方法优势与局限性分析05实验设置与数据采集实验结果展示与分析结果与现有方法的比较06研究结论对未来研究的建议与展望汇报人: