
基于惯性导航角度补偿的室内激光SLAM方法.pptx

快乐****蜜蜂

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于惯性导航角度补偿的室内激光SLAM方法.docx
基于惯性导航角度补偿的室内激光SLAM方法基于惯性导航角度补偿的室内激光SLAM方法摘要:随着智能机器人技术的快速发展,室内激光SLAM(SimultaneousLocalizationandMapping,即同时定位与地图构建)在自主导航和环境感知中起着重要的作用。然而,在室内环境中,惯性导航常常会面临困境,例如由于地面不平或运动状态不稳定导致角度误差的累积问题。本文提出了一种基于惯性导航角度补偿的室内激光SLAM方法,以解决上述问题。该方法结合了惯性导航和激光扫描数据,通过使用地面特征和滤波器算法实现
基于惯性导航角度补偿的室内激光SLAM方法.pptx
汇报人:/目录0102激光SLAM的基本原理室内激光SLAM的应用场景室内激光SLAM的挑战与解决方案03惯性导航系统的基本原理角度补偿在惯性导航系统中的作用角度补偿的方法与实现04方法概述角度补偿在激光SLAM中的具体应用方法优势与局限性分析05实验设置与数据采集实验结果展示与分析结果与现有方法的比较06研究结论对未来研究的建议与展望汇报人:

基于磁场SLAM辅助的惯性导航室内定位研究.docx
基于磁场SLAM辅助的惯性导航室内定位研究基于磁场SLAM辅助的惯性导航室内定位研究摘要:随着室内定位技术的不断发展,人们对于高精度、实时性强的定位方案的需求越来越大。惯性导航(InertialNavigation)是一种无需外部参考的定位方法,具有实时性强、适用于室内环境等优点。然而,惯性导航的定位精度受到累积误差的影响,因此需要辅助其他定位传感器。本论文基于磁场SLAM(SimultaneousLocalizationandMapping)技术对惯性导航进行辅助定位,通过在室内环境中获取磁场信息,并结
一种基于激光SLAM的室内导航车.pdf
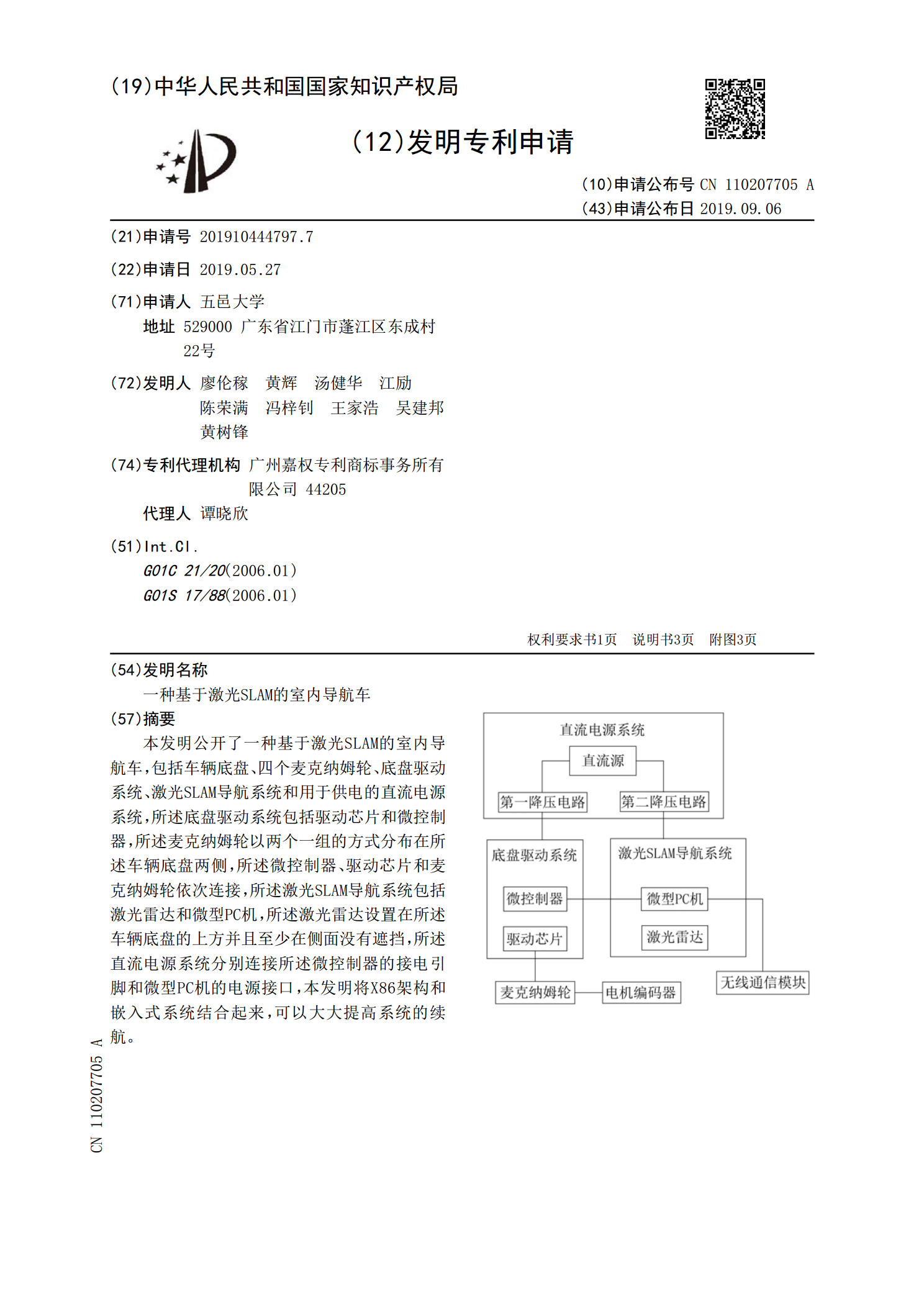
本发明公开了一种基于激光SLAM的室内导航车,包括车辆底盘、四个麦克纳姆轮、底盘驱动系统、激光SLAM导航系统和用于供电的直流电源系统,所述底盘驱动系统包括驱动芯片和微控制器,所述麦克纳姆轮以两个一组的方式分布在所述车辆底盘两侧,所述微控制器、驱动芯片和麦克纳姆轮依次连接,所述激光SLAM导航系统包括激光雷达和微型PC机,所述激光雷达设置在所述车辆底盘的上方并且至少在侧面没有遮挡,所述直流电源系统分别连接所述微控制器的接电引脚和微型PC机的电源接口,本发明将X86架构和嵌入式系统结合起来,可以大大提高系统

基于磁场SLAM辅助的惯性导航室内定位研究的开题报告.docx
基于磁场SLAM辅助的惯性导航室内定位研究的开题报告一、研究背景近年来,室内定位技术在商业、公共安全及智能家居等领域得到广泛应用。但是传统的室内定位技术存在许多问题,如依赖于Wi-Fi信号、定位误差大等。因此,研究基于磁场SLAM辅助的惯性导航室内定位技术能够有效地提高室内定位的准确度、精度与可靠性。目前,基于磁场SLAM辅助的惯性导航室内定位技术已经开始进入人们的视野,并且在学术界得到了较多的关注和研究。该技术可以通过指南针传感器测量磁场值,通过SLAM算法建立建筑物的环境地图,通过互补滤波算法融合惯性