
一种基于5G的矿区无人运输系统的弯道协同感知方法.pdf

淑然****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于5G的矿区无人运输系统的弯道协同感知方法.pdf
本发明公开了一种基于5G矿区无人运输系统的弯道协同感知方法,包括车侧环境感知数据处理,路侧环境感知数据处理,路车协同感知数据处理。通过本发明的技术方案,解决了矿区弯道盲区大,难识别的问题,实现了矿区弯道的广域感知,而无需在车侧加装额外的感知设备,提高了矿车在弯道场景的安全性;将5G传输应用在矿区弯道路侧设备与车侧设备通信,保证了海量数据传输的低延时和高可靠。

一种基于5G网络的用于物流的无人遥控运输系统.pdf
本发明涉及一种基于5G网络的用于物流的无人遥控运输系统,包括运输装置,运输装置包括主体、存储盒、底板、两个伸缩机构和若干螺旋桨,底板内设有空腔,空腔内设有支撑机构,伸缩机构包括密封室、密封块、伸缩组件、气袋和支杆,支撑机构包括驱动组件和四个支撑组件,支撑组件包括丝杆、套管、限位单元、支撑块和两个滑动单元,该基于5G网络的用于物流的无人遥控运输系统通过伸缩机构可带动底板升降移动,将货物收入存储盒内的同时向气袋充气,利用膨胀的气袋提供缓冲保护,避免货物损坏,不仅如此,支撑机构在飞行时可缩小体型减小风阻,在设备
基于感知-锁定-发现的多无人机博弈协同搜索方法.pdf
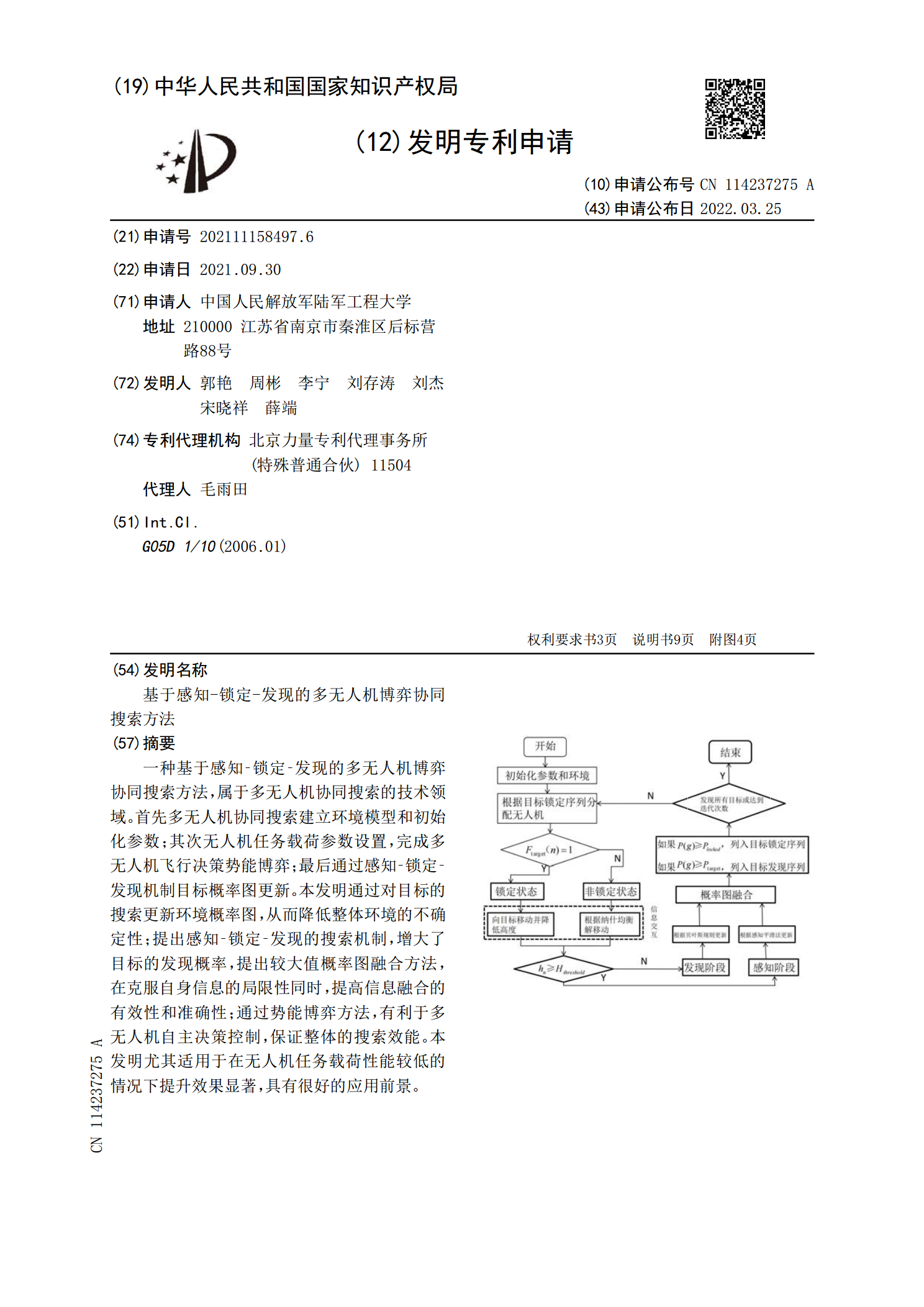
一种基于感知‑锁定‑发现的多无人机博弈协同搜索方法,属于多无人机协同搜索的技术领域。首先多无人机协同搜索建立环境模型和初始化参数;其次无人机任务载荷参数设置,完成多无人机飞行决策势能博弈;最后通过感知‑锁定‑发现机制目标概率图更新。本发明通过对目标的搜索更新环境概率图,从而降低整体环境的不确定性;提出感知‑锁定‑发现的搜索机制,增大了目标的发现概率,提出较大值概率图融合方法,在克服自身信息的局限性同时,提高信息融合的有效性和准确性;通过势能博弈方法,有利于多无人机自主决策控制,保证整体的搜索效能。本发明尤

一种基于信息融合的多无人机协同态势感知方法及系统.pdf
本发明涉及一种基于信息融合的多无人机协同态势感知方法及系统,涉及无人机态势感知技术领域。所述方法包括获取零时刻和t时刻的参数值;根据零时刻的参数值确定零时刻多个大地坐标;根据零时刻无人机的姿态角、无人机在地面坐标系下的坐标和无人机的机体坐标系对应的大地坐标得到零时刻无人机与障碍物的视距和视角;根据零时刻各无人机与障碍物的视距、视角和t时刻的参数值采用D?S证据理论得到t时刻的融合参数;根据t时刻的融合参数和t?1时刻的融合参数得到t时刻最终的融合参数。本发明可提高态势的感知结果。

基于5G的煤矿井下无人机巡视信息感知方法及其感知系统.pdf
本发明基于5G的煤矿井下无人机巡视信息感知方法及其感知系统,属于煤矿井下无人机巡视信息感知技术领域;所要解决的技术问题为:提供基于5G的煤矿井下无人机巡视信息感知方法的改进;解决上述技术问题采用的技术方案为:构建数据集,构建操作集,根据构建的数据集和操作集使僚机进行初步学习具备自主学习能力后,长机发布巡视任务指令,在巡视过程中僚机通过强化学习机制进行进一步学习,同时将传感器采集数据和图像信息发送至长机,长机通过深度学习完成图像处理和参数提取,同时通过对数据的分析处理完成长机的强化学习机制;在巡视过程中长机