
车辆避障告警方法及系统.pdf

一只****iu

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆避障告警方法及系统.pdf
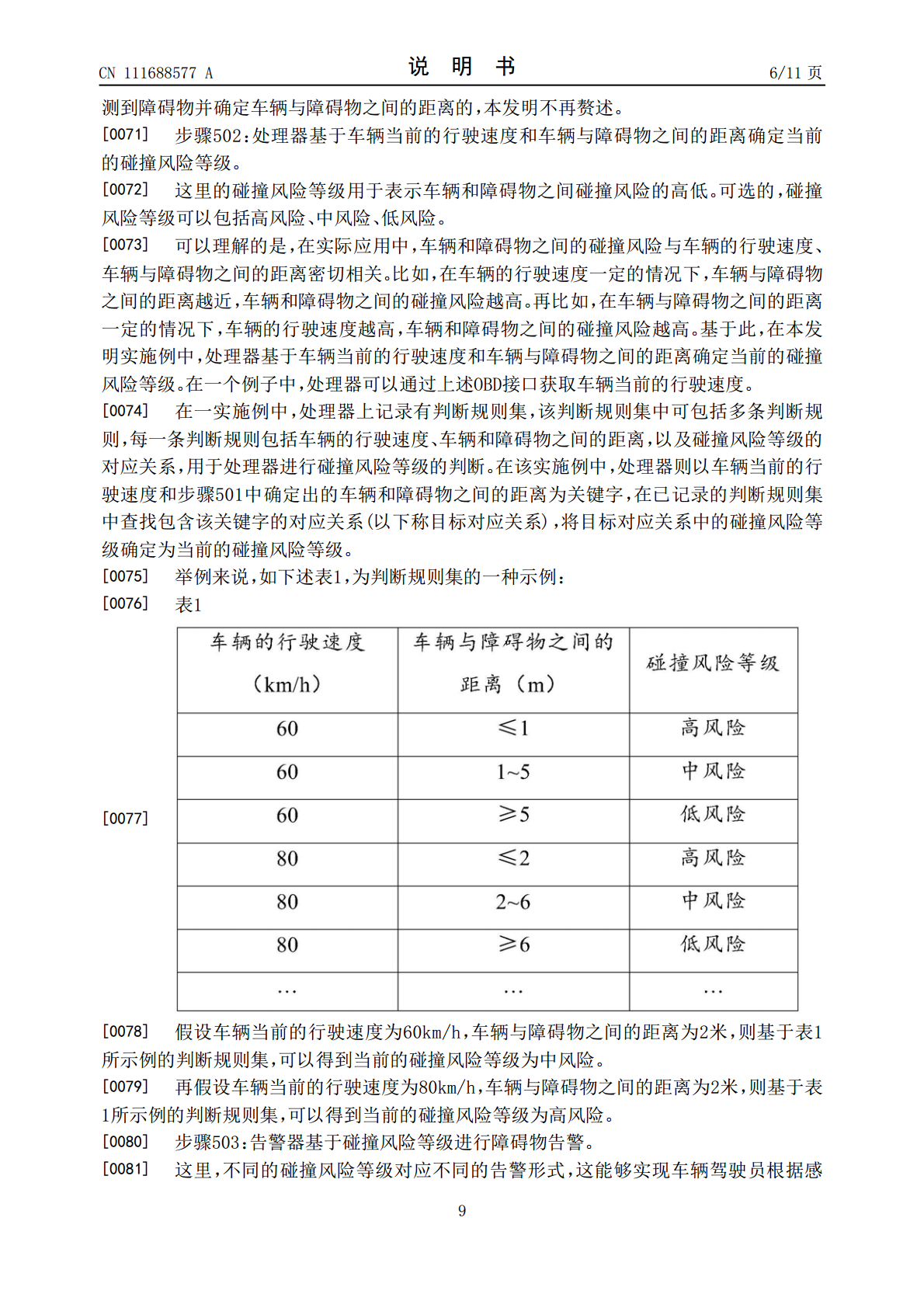
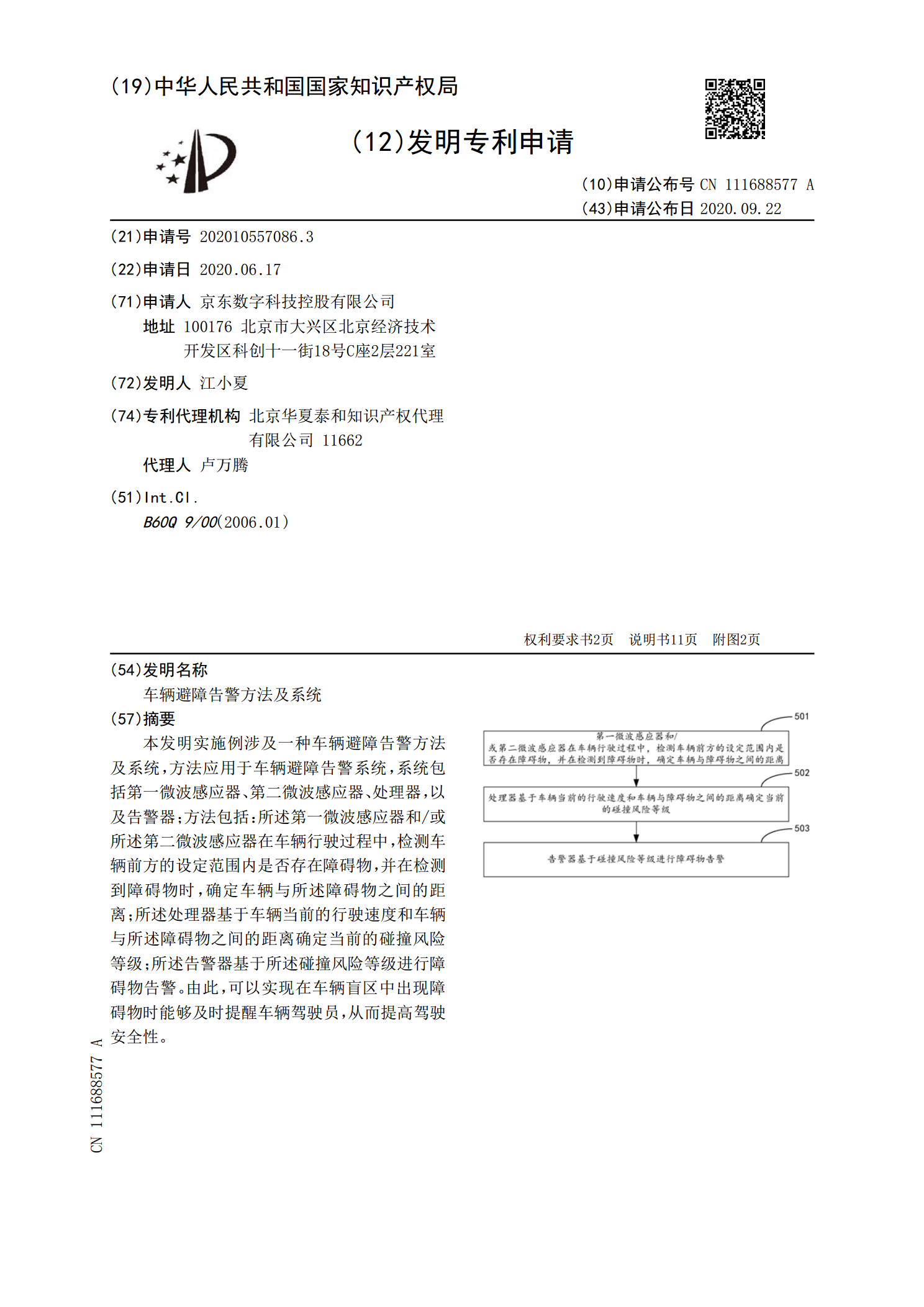
本发明实施例涉及一种车辆避障告警方法及系统,方法应用于车辆避障告警系统,系统包括第一微波感应器、第二微波感应器、处理器,以及告警器;方法包括:所述第一微波感应器和/或所述第二微波感应器在车辆行驶过程中,检测车辆前方的设定范围内是否存在障碍物,并在检测到障碍物时,确定车辆与所述障碍物之间的距离;所述处理器基于车辆当前的行驶速度和车辆与所述障碍物之间的距离确定当前的碰撞风险等级;所述告警器基于所述碰撞风险等级进行障碍物告警。由此,可以实现在车辆盲区中出现障碍物时能够及时提醒车辆驾驶员,从而提高驾驶安全性。
车辆智能避障方法、系统、介质、车机及车辆.pdf
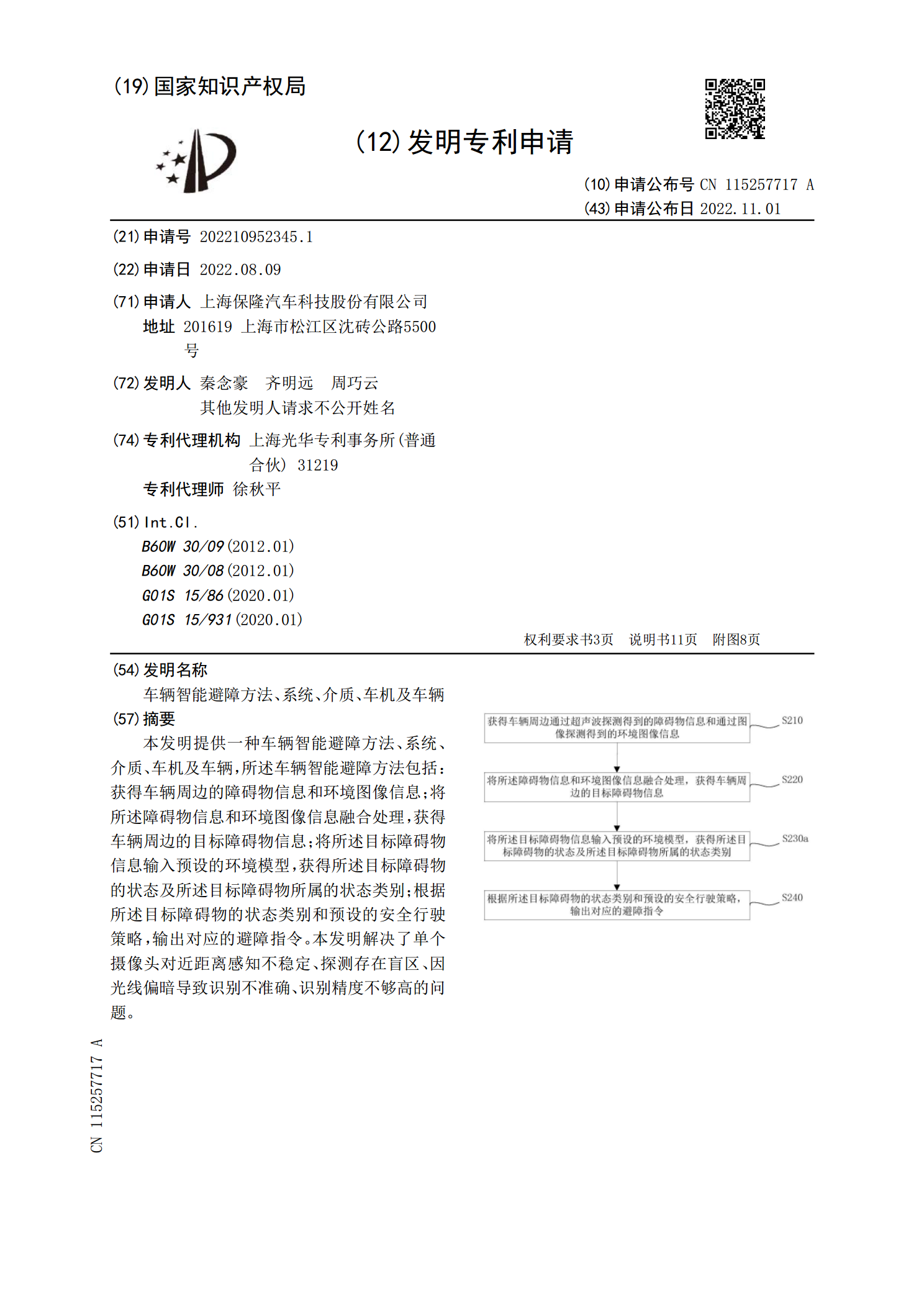
本发明提供一种车辆智能避障方法、系统、介质、车机及车辆,所述车辆智能避障方法包括:获得车辆周边的障碍物信息和环境图像信息;将所述障碍物信息和环境图像信息融合处理,获得车辆周边的目标障碍物信息;将所述目标障碍物信息输入预设的环境模型,获得所述目标障碍物的状态及所述目标障碍物所属的状态类别;根据所述目标障碍物的状态类别和预设的安全行驶策略,输出对应的避障指令。本发明解决了单个摄像头对近距离感知不稳定、探测存在盲区、因光线偏暗导致识别不准确、识别精度不够高的问题。
机械臂的避障方法及避障系统.pdf
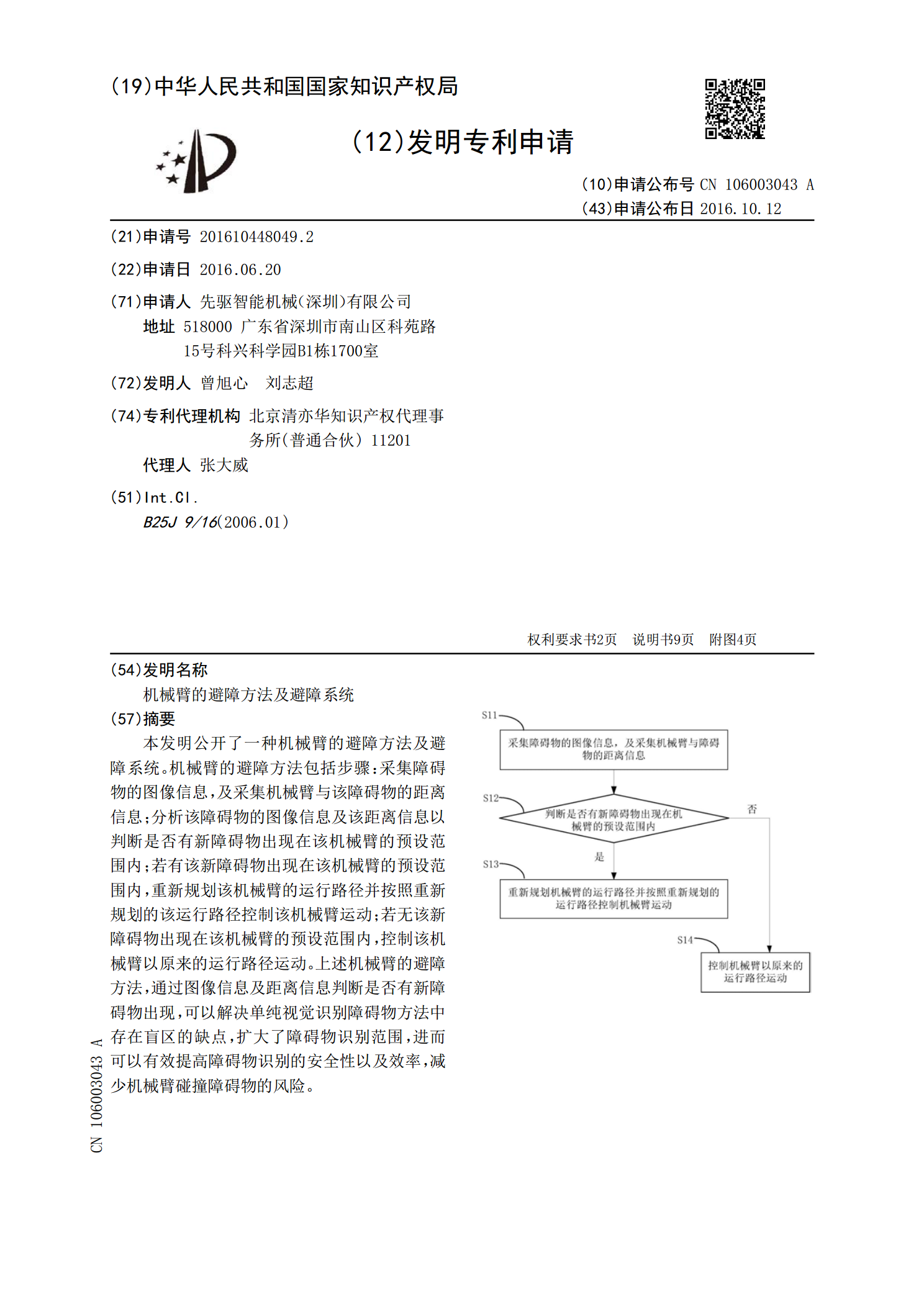
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点
车辆避障和检测盲区的控制方法、系统.pdf
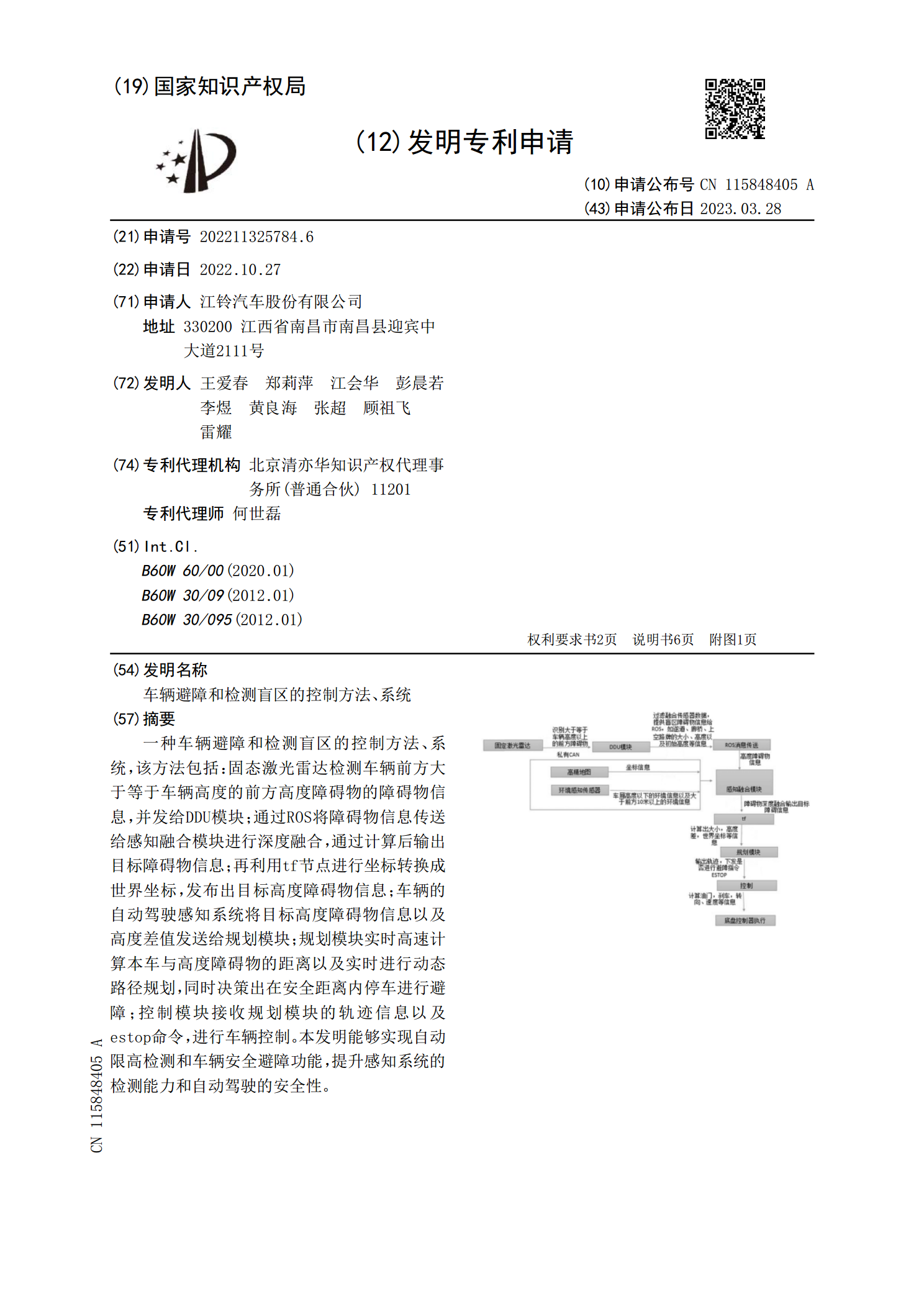
一种车辆避障和检测盲区的控制方法、系统,该方法包括:固态激光雷达检测车辆前方大于等于车辆高度的前方高度障碍物的障碍物信息,并发给DDU模块;通过ROS将障碍物信息传送给感知融合模块进行深度融合,通过计算后输出目标障碍物信息;再利用tf节点进行坐标转换成世界坐标,发布出目标高度障碍物信息;车辆的自动驾驶感知系统将目标高度障碍物信息以及高度差值发送给规划模块;规划模块实时高速计算本车与高度障碍物的距离以及实时进行动态路径规划,同时决策出在安全距离内停车进行避障;控制模块接收规划模块的轨迹信息以及estop命令
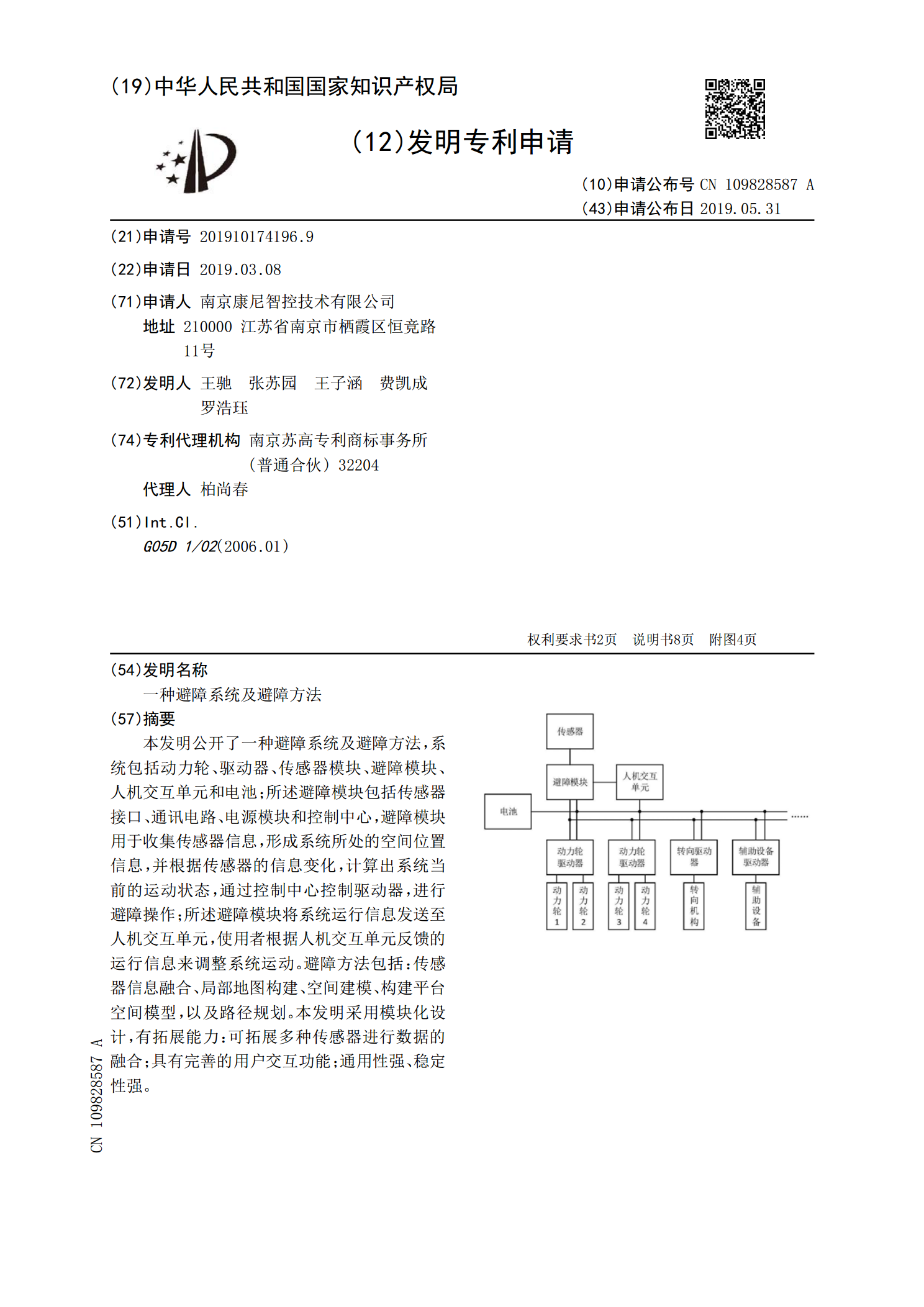
一种避障系统及避障方法.pdf
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,