
车辆避障和检测盲区的控制方法、系统.pdf

觅松****哥哥


1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
车辆避障和检测盲区的控制方法、系统.pdf
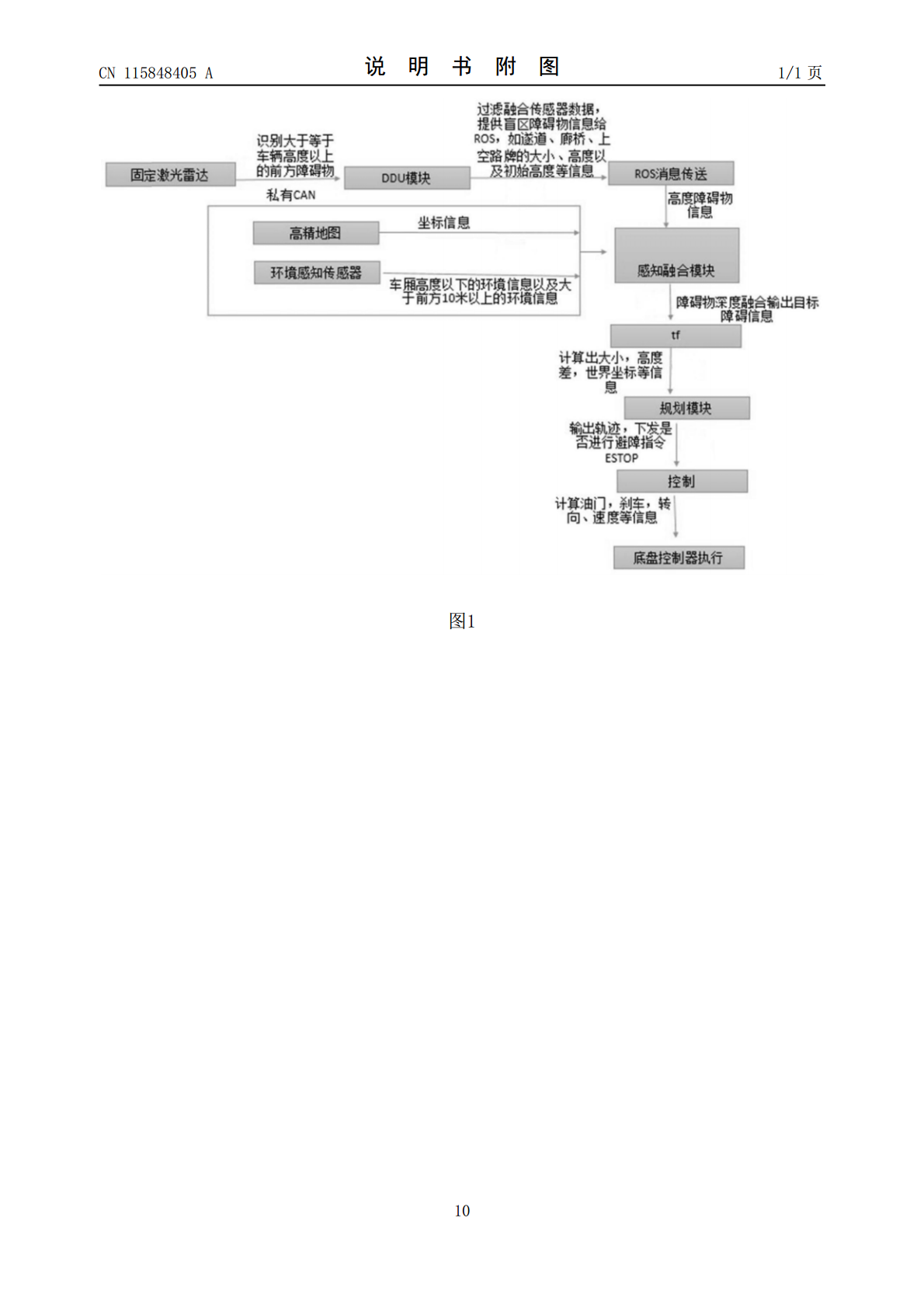
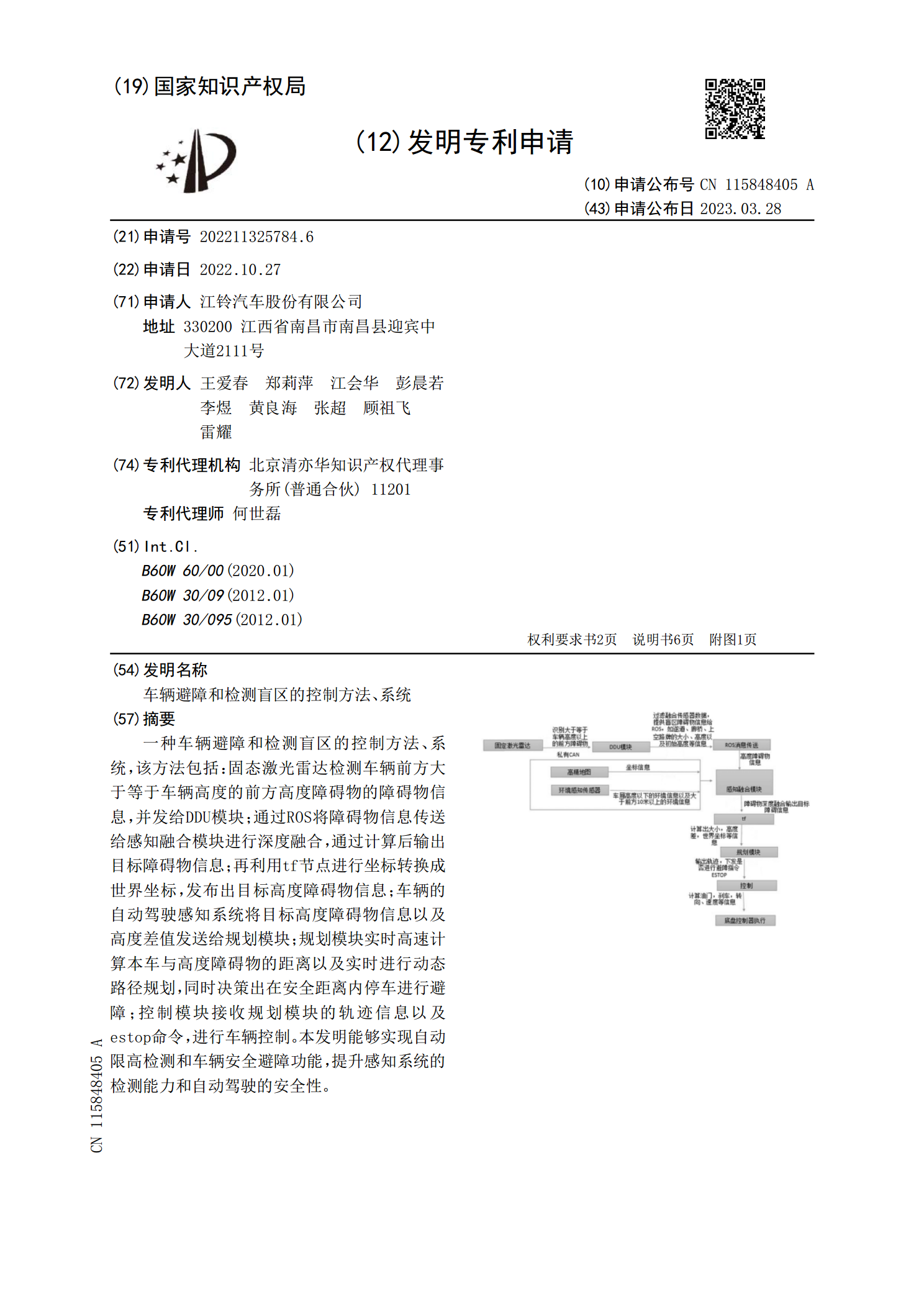
一种车辆避障和检测盲区的控制方法、系统,该方法包括:固态激光雷达检测车辆前方大于等于车辆高度的前方高度障碍物的障碍物信息,并发给DDU模块;通过ROS将障碍物信息传送给感知融合模块进行深度融合,通过计算后输出目标障碍物信息;再利用tf节点进行坐标转换成世界坐标,发布出目标高度障碍物信息;车辆的自动驾驶感知系统将目标高度障碍物信息以及高度差值发送给规划模块;规划模块实时高速计算本车与高度障碍物的距离以及实时进行动态路径规划,同时决策出在安全距离内停车进行避障;控制模块接收规划模块的轨迹信息以及estop命令
车辆盲区检测方法和车辆盲区检测系统.pdf
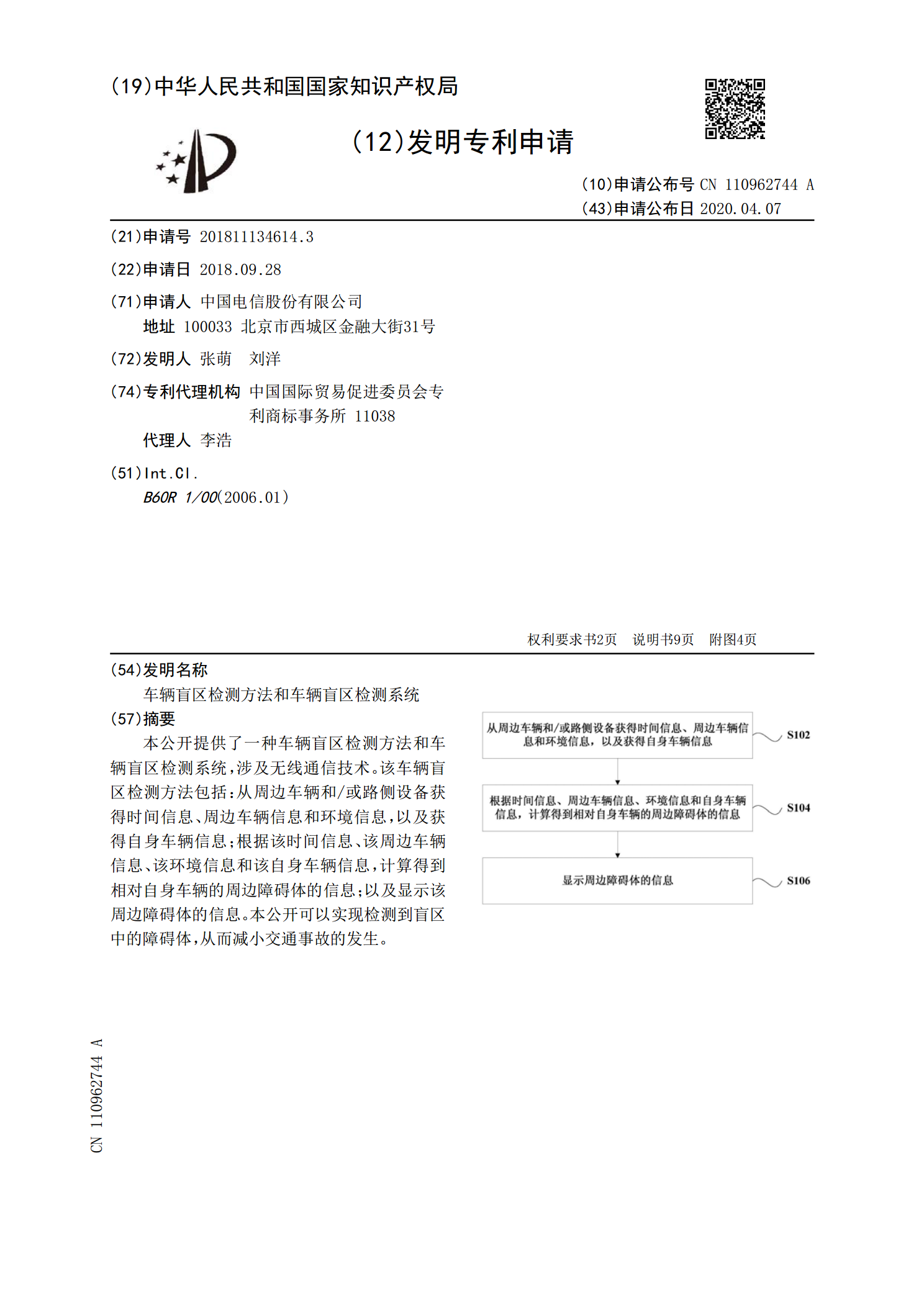
本公开提供了一种车辆盲区检测方法和车辆盲区检测系统,涉及无线通信技术。该车辆盲区检测方法包括:从周边车辆和/或路侧设备获得时间信息、周边车辆信息和环境信息,以及获得自身车辆信息;根据该时间信息、该周边车辆信息、该环境信息和该自身车辆信息,计算得到相对自身车辆的周边障碍体的信息;以及显示该周边障碍体的信息。本公开可以实现检测到盲区中的障碍体,从而减小交通事故的发生。

盲区检测系统、盲区检测方法和车辆.pdf
本发明公开了一种盲区检测系统。盲区检测系统包括多个相机、目标检测模块、目标跟踪模块和目标报警模块。多个相机用于采集车辆外多个预定区域的多个图像;目标检测模块用于提取多个图像的特征点并根据特征点获得目标;目标跟踪模块用于对目标进行跟踪并根据目标和车辆的传感器信息判断目标是否对车辆形成危险;和目标报警模块用于在目标对车辆形成危险时发出警示信息。此外,本发明还公开了一种盲区检测方法和一种车辆。本发明的盲区检测系统、盲区检测方法和车辆利用多个相机采集车辆外多个预定区域的多个图像,根据多个图像可以获取车辆外预定区域
车辆避障告警方法及系统.pdf
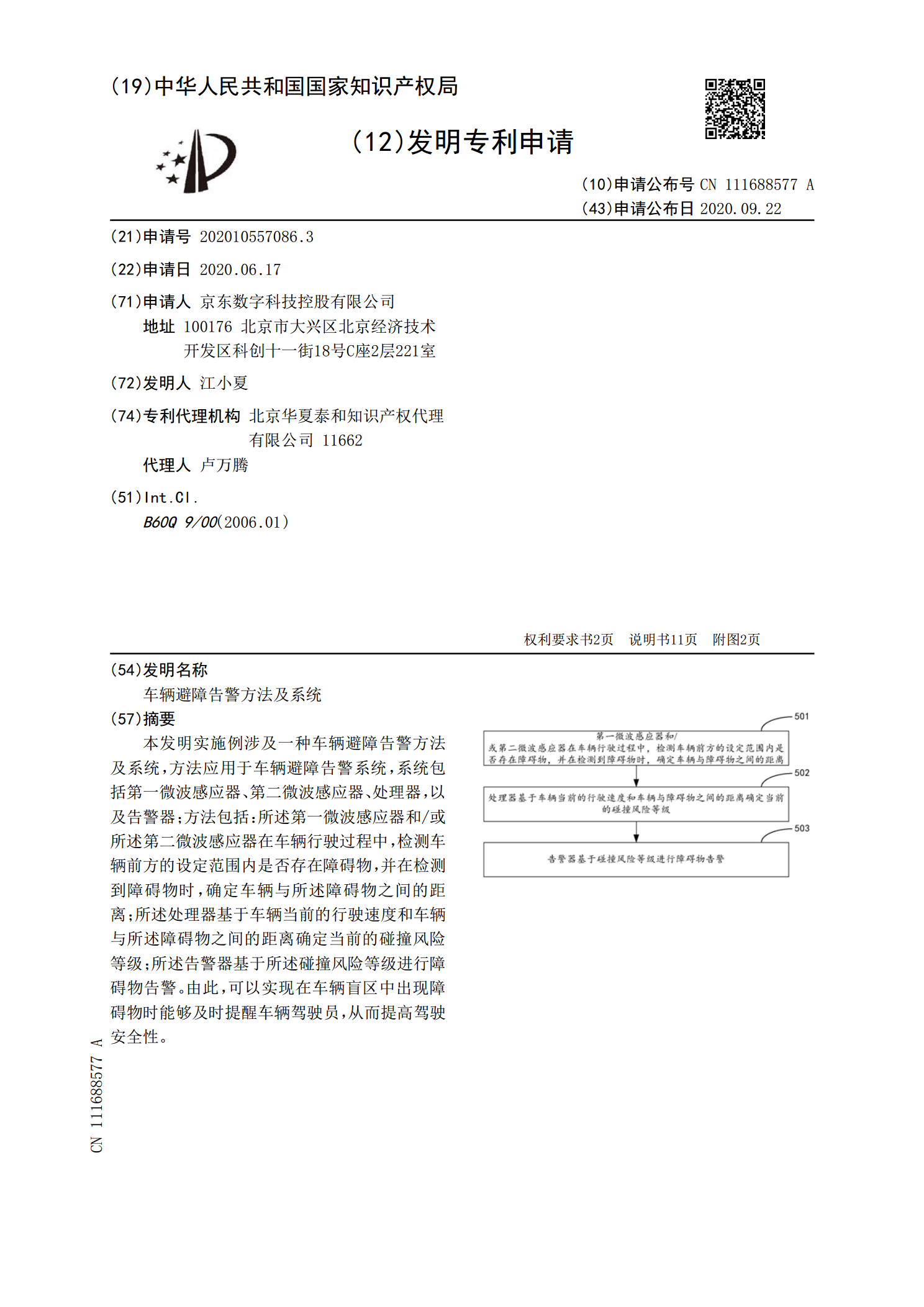
本发明实施例涉及一种车辆避障告警方法及系统,方法应用于车辆避障告警系统,系统包括第一微波感应器、第二微波感应器、处理器,以及告警器;方法包括:所述第一微波感应器和/或所述第二微波感应器在车辆行驶过程中,检测车辆前方的设定范围内是否存在障碍物,并在检测到障碍物时,确定车辆与所述障碍物之间的距离;所述处理器基于车辆当前的行驶速度和车辆与所述障碍物之间的距离确定当前的碰撞风险等级;所述告警器基于所述碰撞风险等级进行障碍物告警。由此,可以实现在车辆盲区中出现障碍物时能够及时提醒车辆驾驶员,从而提高驾驶安全性。

车辆避障驾驶控制方法研究.docx
车辆避障驾驶控制方法研究车辆避障驾驶控制方法研究随着人类社会的不断发展,车辆成为人们日常生活与工作中不可或缺的一部分。但是,车辆行驶过程中难以避免遇到各种各样的障碍物,如行人、车辆、路障、建筑物等,这些障碍物可能会对车辆和驾驶员造成危险。为了提高车辆行驶的安全性和自主性,车辆避障驾驶控制方法成为了当前的热点研究领域。本文将探讨车辆避障驾驶控制方法的相关研究。一、车辆避障驾驶控制方法的分类1.基于传统控制方法的避障控制方法这种方法基于传统的控制方法,如PID控制,将传感器获取到的路面和障碍物信息进行处理,并