
一种汽车避免因盲区发生碰撞的方法及系统.pdf

邻家****曼玉

1/7
2/7
3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种汽车避免因盲区发生碰撞的方法及系统.pdf
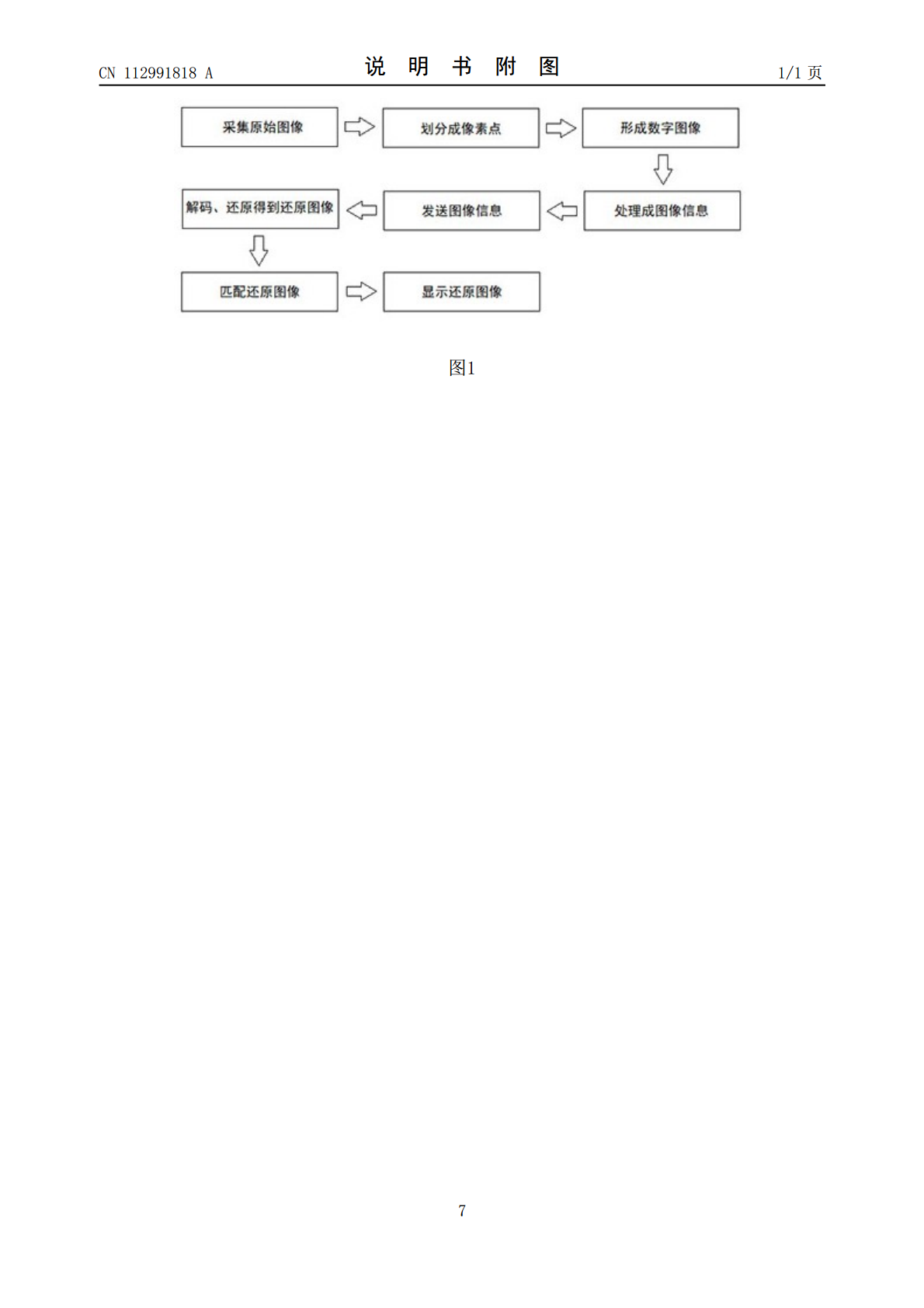
本发明属于汽车驾驶辅助相关领域,具体为一种汽车避免因盲区发生碰撞的方法及系统。本发明基于设于路口的多个不同采集方向的摄像头以及安装在汽车上的显示装置实现包括以下步骤:S1.摄像头通过摄像模块采集原始图像;S2.摄像头对采集到的原始图像进行处理形成图像信息,并发送所述图像信息;S3.当安装有所述显示装置的汽车经过所述路口时,显示装置接收到安装在所述路口的多个摄像头发送的多个图像信息;S4.所述显示装置对接收到的多个图像信息进行处理,得到分别与多个所述图像信息对应的多个还原图像;S5.所述显示装置输出与所述汽
汽车的避免碰撞系统及其运行方法.pdf
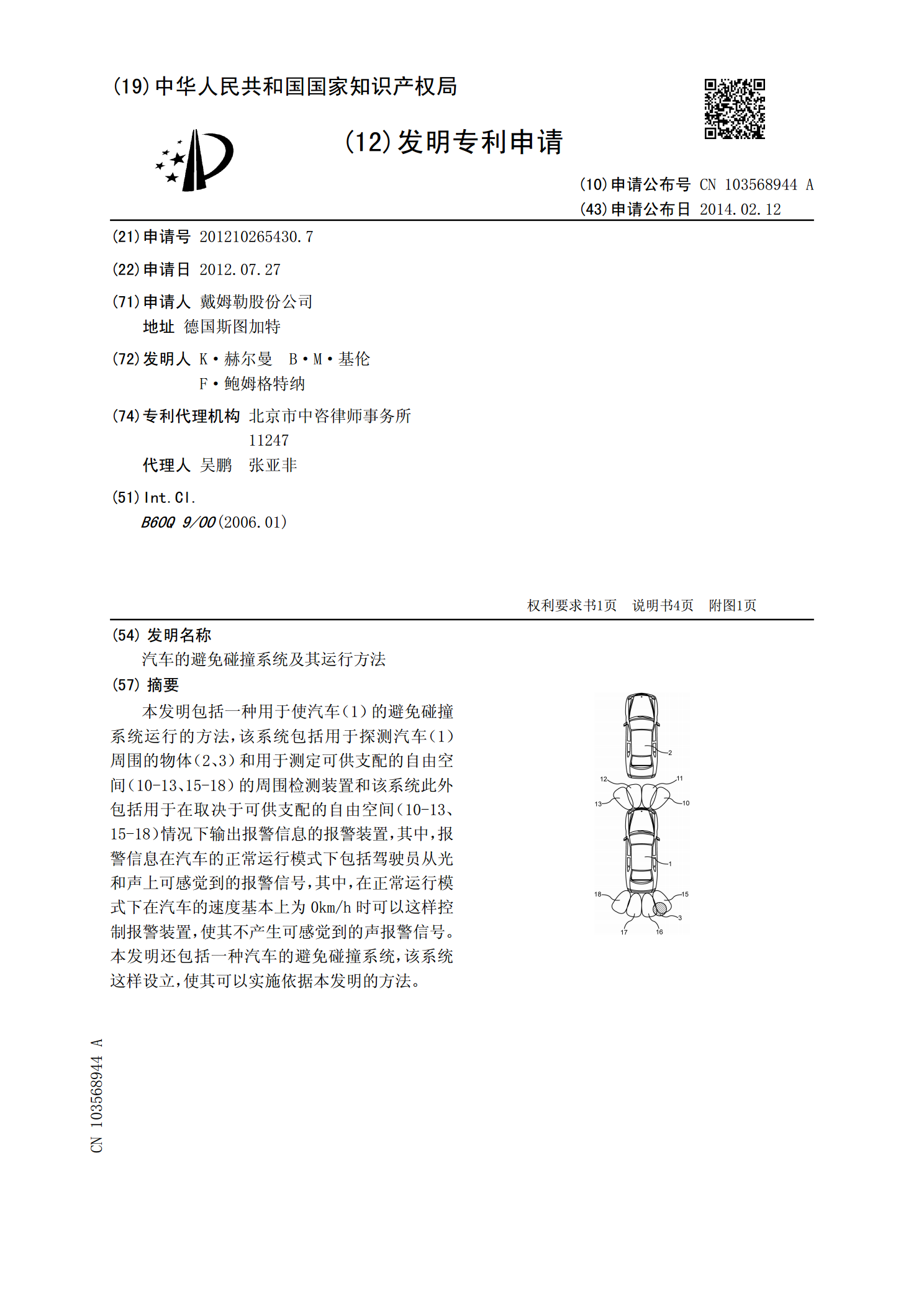
本发明包括一种用于使汽车(1)的避免碰撞系统运行的方法,该系统包括用于探测汽车(1)周围的物体(2、3)和用于测定可供支配的自由空间(10-13、15-18)的周围检测装置和该系统此外包括用于在取决于可供支配的自由空间(10-13、15-18)情况下输出报警信息的报警装置,其中,报警信息在汽车的正常运行模式下包括驾驶员从光和声上可感觉到的报警信号,其中,在正常运行模式下在汽车的速度基本上为0km/h时可以这样控制报警装置,使其不产生可感觉到的声报警信号。本发明还包括一种汽车的避免碰撞系统,该系统这样设立,
一种汽车盲区碰撞预警装置及方法.pdf
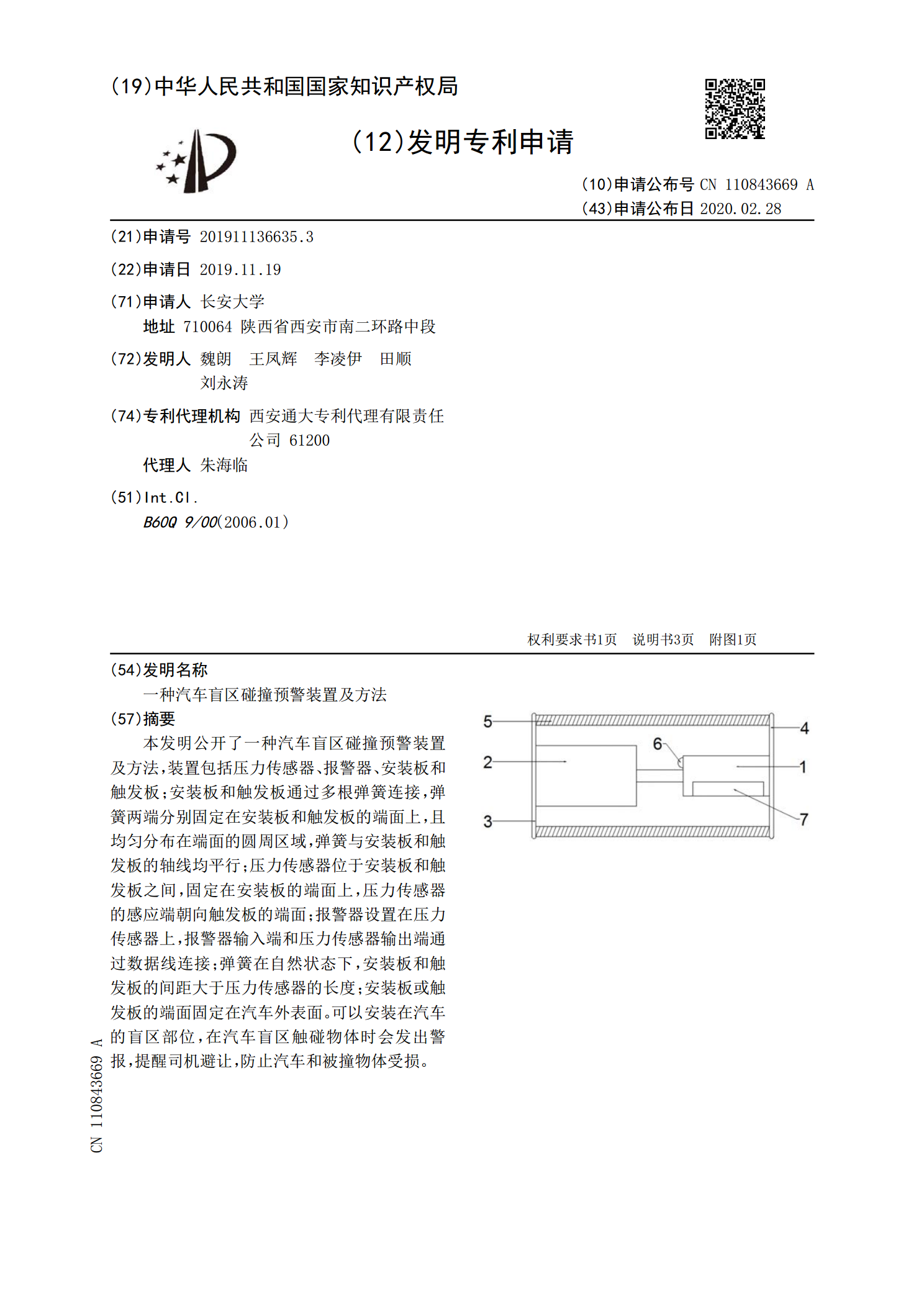
本发明公开了一种汽车盲区碰撞预警装置及方法,装置包括压力传感器、报警器、安装板和触发板;安装板和触发板通过多根弹簧连接,弹簧两端分别固定在安装板和触发板的端面上,且均匀分布在端面的圆周区域,弹簧与安装板和触发板的轴线均平行;压力传感器位于安装板和触发板之间,固定在安装板的端面上,压力传感器的感应端朝向触发板的端面;报警器设置在压力传感器上,报警器输入端和压力传感器输出端通过数据线连接;弹簧在自然状态下,安装板和触发板的间距大于压力传感器的长度;安装板或触发板的端面固定在汽车外表面。可以安装在汽车的盲区部位
一种盲区碰撞预警系统及方法.pdf
本发明公开了一种盲区碰撞预警系统,包括:多个智能手持移动设备,其能够获取用户的速度信息,方向信息和位置信息,云计算平台,其能够接收所述智能手持移动设备获取的速度信息,方向信息和位置信息,所述云计算平台能够计算是否有碰撞可能,并且能够将碰撞预警信息发送给智能手持移动设备,以控制智能手持移动设备进行报警。本发明还提供了一种盲区碰撞预警方法。本发明将车联网,云计算技术和手持移动设备相连,提升了道路交通参与者间的信息交互能力。云计算中心对道路交通参与者的宏观调控,大大提高了道路交通的安全性与效率。

避免汽车视野盲区的方法有哪些.docx
避免汽车视野盲区的方法有哪些避免汽车视野盲区的方法有哪些11、城市里的车辆保有量日益增多,为了缓解交通压力,各种各样的高架路桥应运而生,但也为驾驶者带来了不少安全隐患。因为支撑桥面需要建无数个桥墩。当你走在紧挨桥墩的车道时,这无形中就形成了一个可怕的盲区。你有想过,桥墩后面会突然跑出一个行人来吗?支招:在有选择的情况下,尽量不要走在最靠近桥墩一侧的车道,尽管那条车道往往是最为通畅的。特别留意桥墩附近的路况,如需左拐或者掉头,那也得注意控制车速,时刻保持高度警惕,并与前车保持足够距离,以防前车突然急刹造成追