
一种反无人机探测系统及其控制方法.pdf

Jo****34


1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种反无人机探测系统及其控制方法.pdf
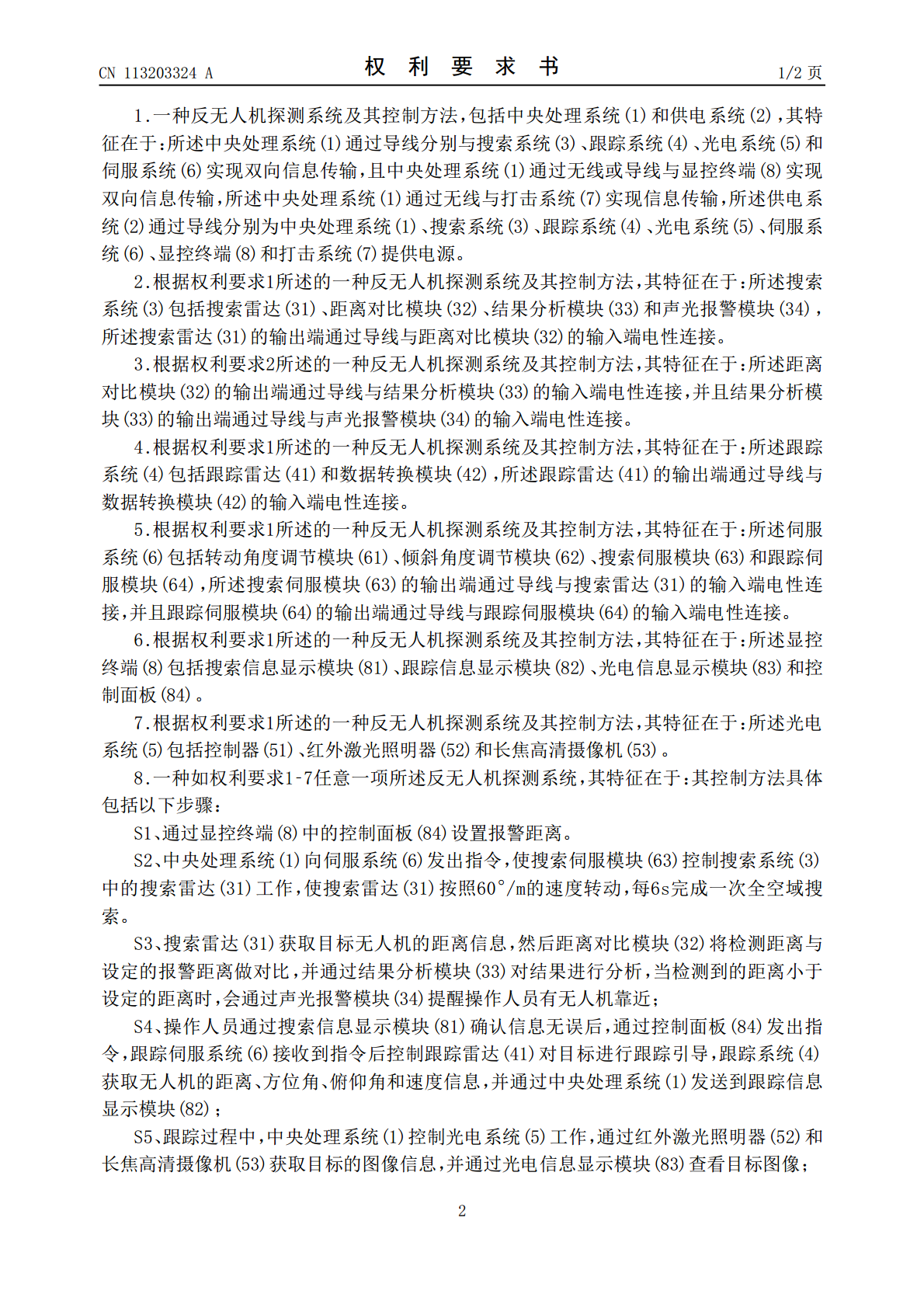
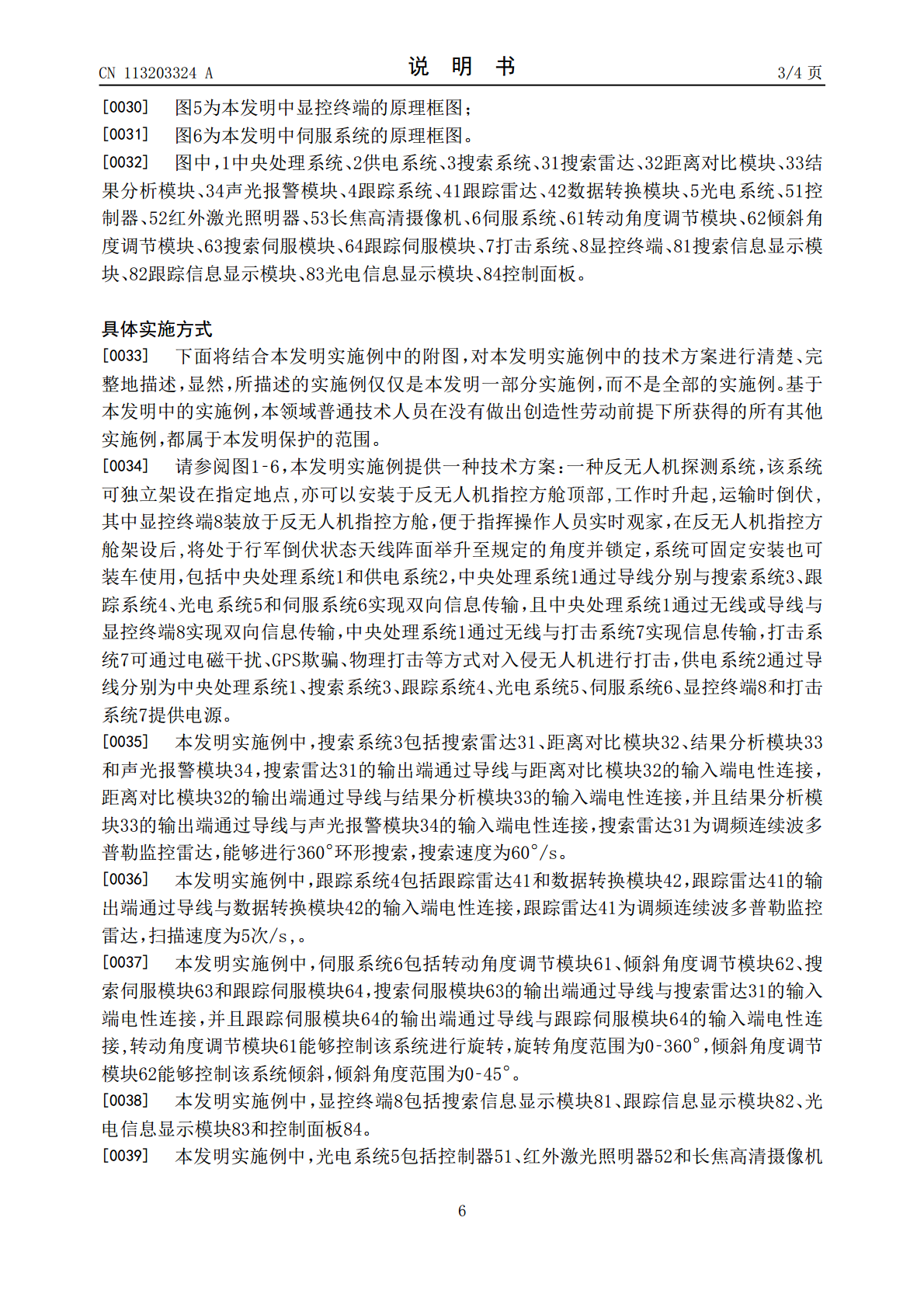
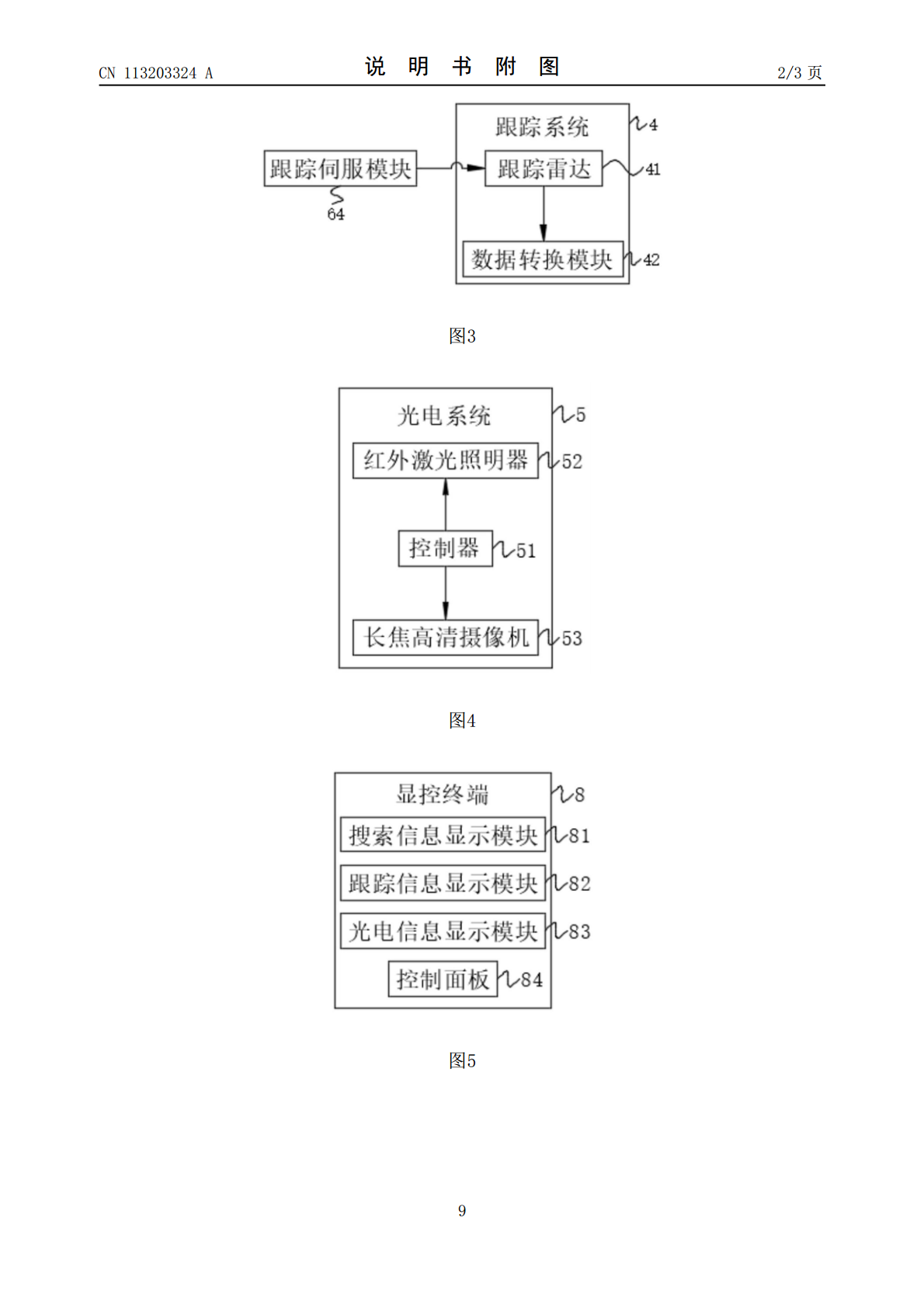
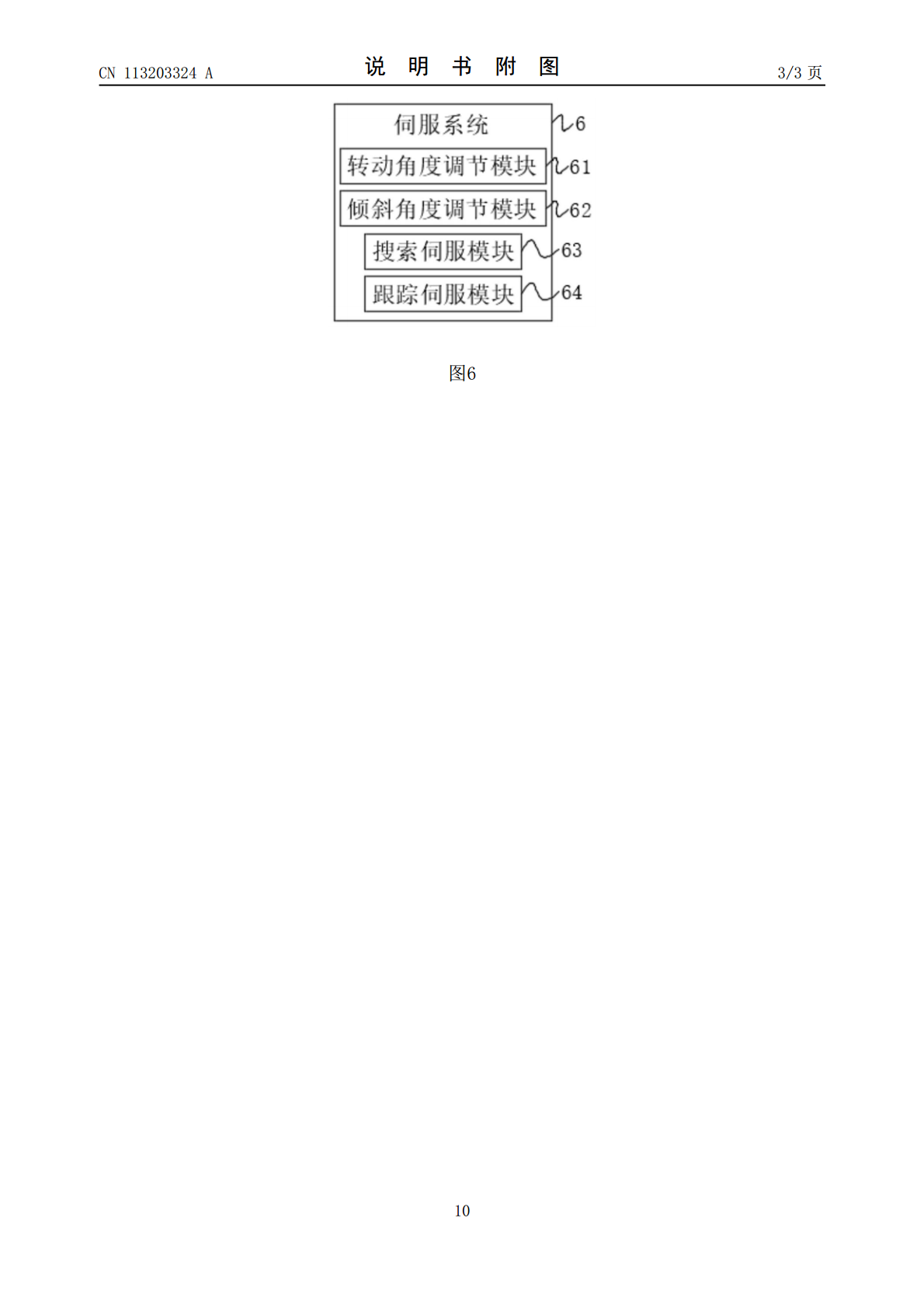
本发明公开了一种反无人机探测系统及其控制方法,包括中央处理系统和供电系统,中央处理系统通过导线分别与搜索系统、跟踪系统、光电系统和伺服系统实现双向信息传输,且中央处理系统通过无线或导线与显控终端实现双向信息传输,中央处理系统通过无线与打击系统实现信息传输,本发明涉及反无人机技术领域。该反无人机探测系统及其控制方法,通过搜索雷达和跟踪雷达相互协同工作,减少探测盲区,从而提高了探测的精准度,且降低了单个雷达的工作压力,有利于延长雷达的使用寿命,采用双雷达体制,实现了大空域扫描和高精度跟踪,可以设置报警区域,当
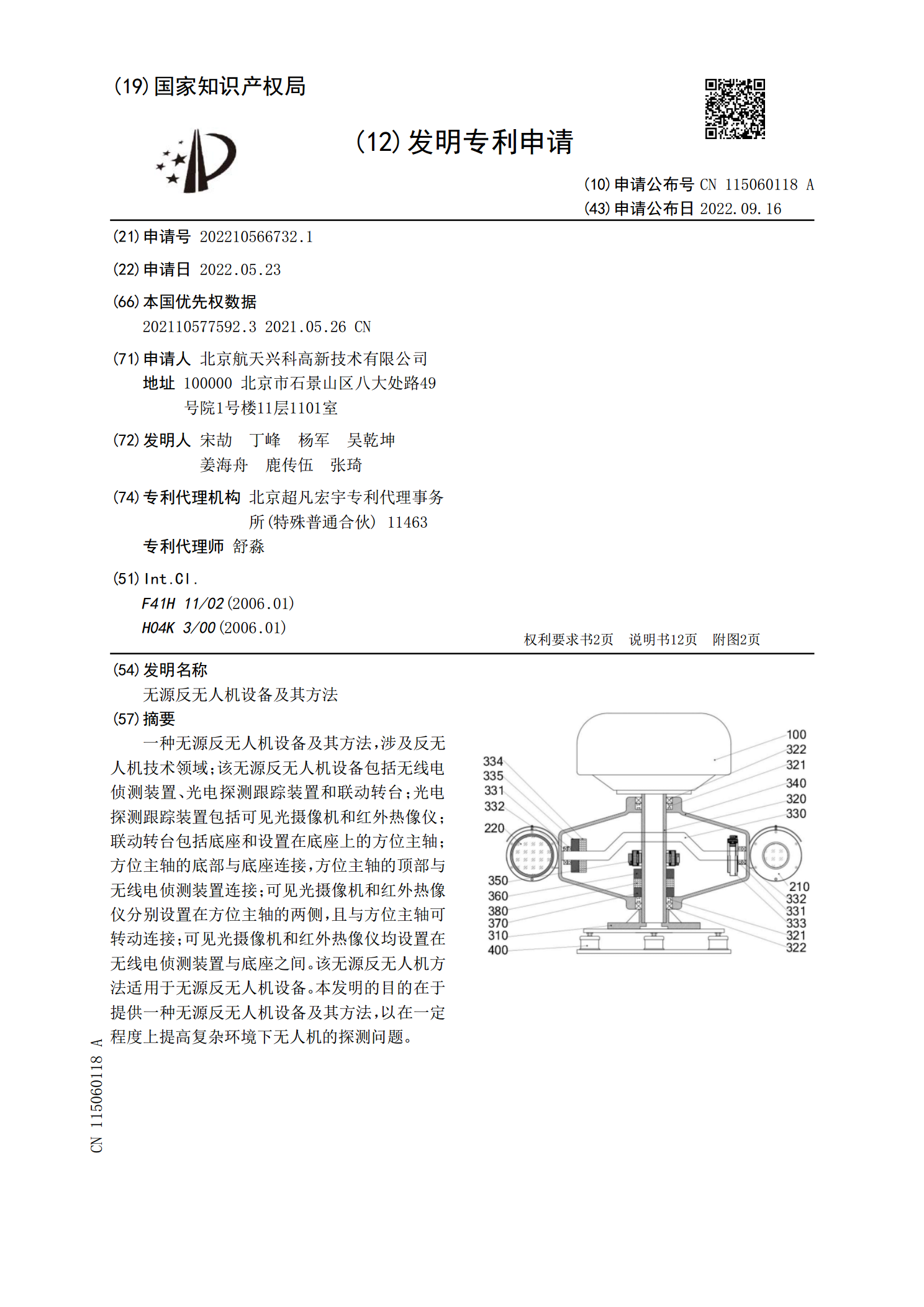
无源反无人机设备及其方法.pdf
一种无源反无人机设备及其方法,涉及反无人机技术领域;该无源反无人机设备包括无线电侦测装置、光电探测跟踪装置和联动转台;光电探测跟踪装置包括可见光摄像机和红外热像仪;联动转台包括底座和设置在底座上的方位主轴;方位主轴的底部与底座连接,方位主轴的顶部与无线电侦测装置连接;可见光摄像机和红外热像仪分别设置在方位主轴的两侧,且与方位主轴可转动连接;可见光摄像机和红外热像仪均设置在无线电侦测装置与底座之间。该无源反无人机方法适用于无源反无人机设备。本发明的目的在于提供一种无源反无人机设备及其方法,以在一定程度上提高
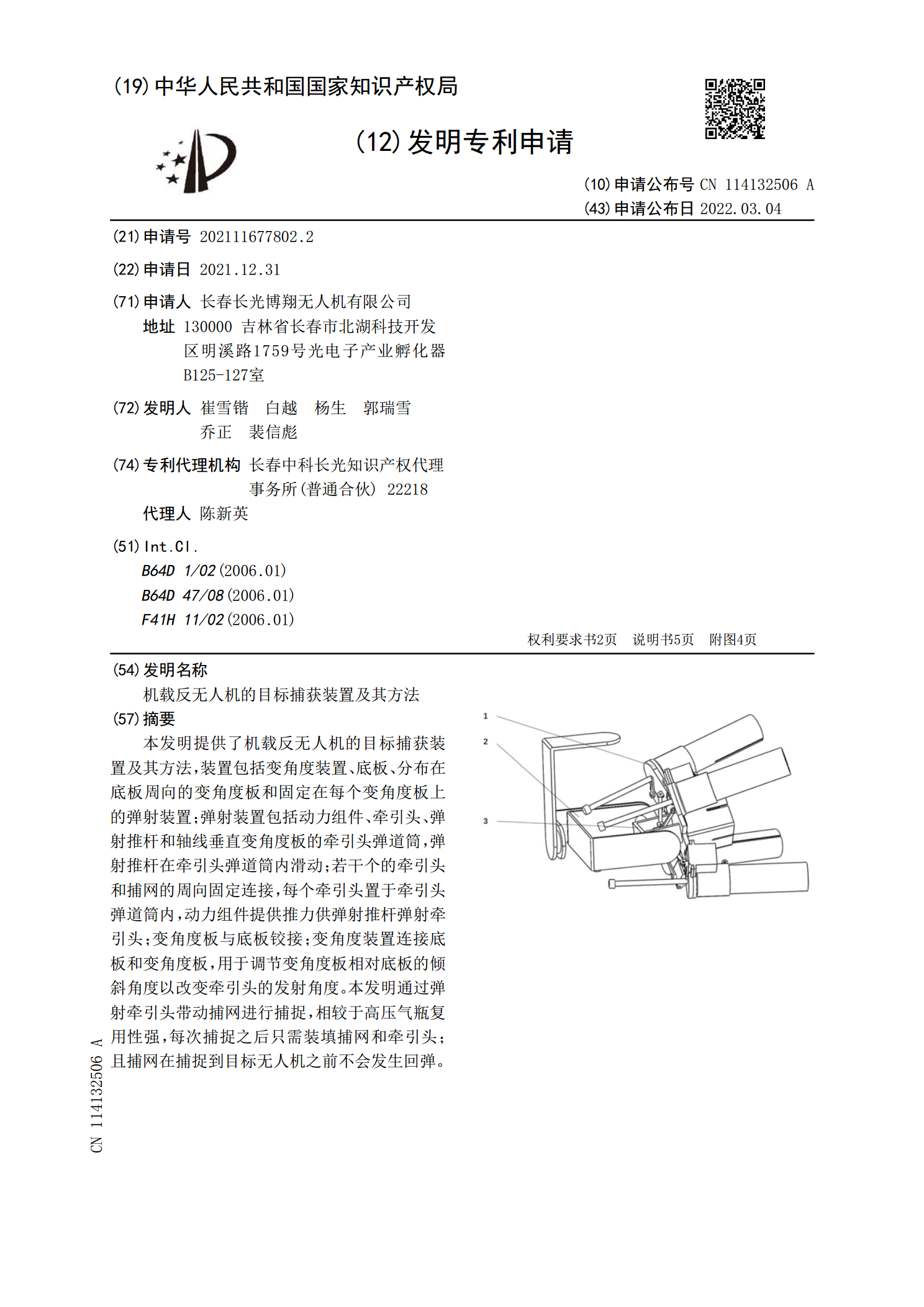
机载反无人机的目标捕获装置及其方法.pdf
本发明提供了机载反无人机的目标捕获装置及其方法,装置包括变角度装置、底板、分布在底板周向的变角度板和固定在每个变角度板上的弹射装置;弹射装置包括动力组件、牵引头、弹射推杆和轴线垂直变角度板的牵引头弹道筒,弹射推杆在牵引头弹道筒内滑动;若干个的牵引头和捕网的周向固定连接,每个牵引头置于牵引头弹道筒内,动力组件提供推力供弹射推杆弹射牵引头;变角度板与底板铰接;变角度装置连接底板和变角度板,用于调节变角度板相对底板的倾斜角度以改变牵引头的发射角度。本发明通过弹射牵引头带动捕网进行捕捉,相较于高压气瓶复用性强,每

一种反无人机多光谱探测跟踪方法.pdf
本发明公开了一种反无人机多光谱探测跟踪方法,属于多光谱探测跟踪技术领域。通过雷达定位目标对目标进行粗跟踪闭环控制,实现对目标的实时稳定跟踪,在粗跟踪闭环控制的基础上进一步精跟踪闭环控制,消除目标和发射望远镜之间因环境的影响存在的瞄准偏差,在稳定跟踪的基础上提高了成像光轴的稳定度及跟踪精度,实现了对目标的二次稳定高精度跟踪。同时,在粗跟踪闭环控制过程中,通过短波、中波、近红外和可见光波段等多波段对目标进行变焦大视场探测识别,在精跟踪闭环控制中,通过可见光和近红外波段光学定焦对目标进行更精准的视场调控,实现了

诱骗天线及其驱动方法、以及反无人机导航诱骗器.pdf
本公开的实施例提供一种诱骗天线及其驱动方法、以及反无人机导航诱骗器。该诱骗天线包括功分器、第一开关组件、第二开关组件、全向式发射天线、定向式发射天线及伺服运动机构。功分器将射频信号分配到第一和第二射频输出口。第一开关组件在第一开关控制信号指示天线导通的情况下,引导第一射频输出口所分配的射频信号从全向式发射天线辐射出去,否则,引导第一射频输出口所分配的射频信号被消耗掉。第二开关组件被配置为:在第二开关控制信号指示天线导通的情况下,引导第二射频输出口所分配的射频信号从定向式发射天线辐射出去,否则,引导第二射频