
机载反无人机的目标捕获装置及其方法.pdf

努力****星驰


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机载反无人机的目标捕获装置及其方法.pdf
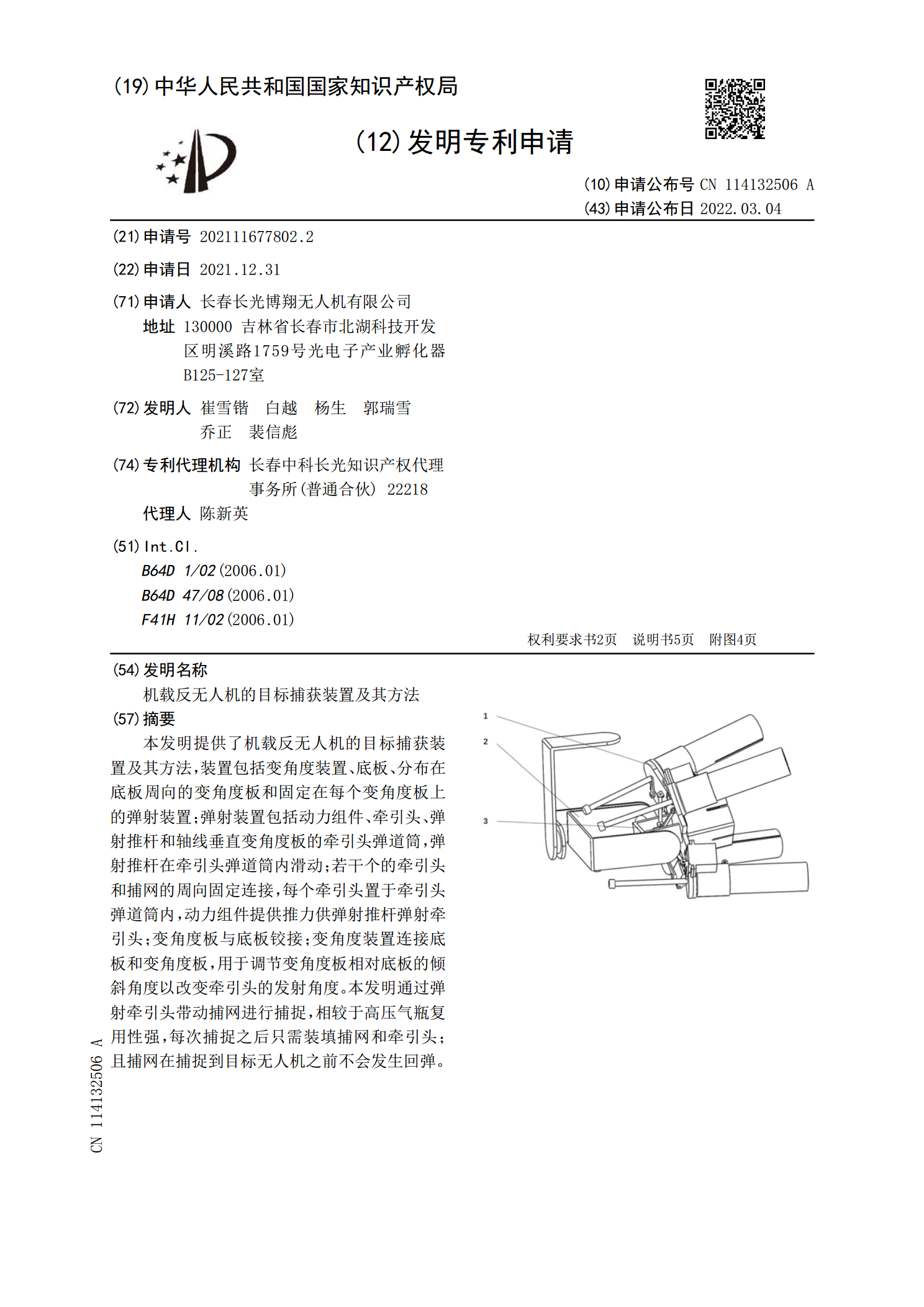
本发明提供了机载反无人机的目标捕获装置及其方法,装置包括变角度装置、底板、分布在底板周向的变角度板和固定在每个变角度板上的弹射装置;弹射装置包括动力组件、牵引头、弹射推杆和轴线垂直变角度板的牵引头弹道筒,弹射推杆在牵引头弹道筒内滑动;若干个的牵引头和捕网的周向固定连接,每个牵引头置于牵引头弹道筒内,动力组件提供推力供弹射推杆弹射牵引头;变角度板与底板铰接;变角度装置连接底板和变角度板,用于调节变角度板相对底板的倾斜角度以改变牵引头的发射角度。本发明通过弹射牵引头带动捕网进行捕捉,相较于高压气瓶复用性强,每
无源反无人机设备及其方法.pdf
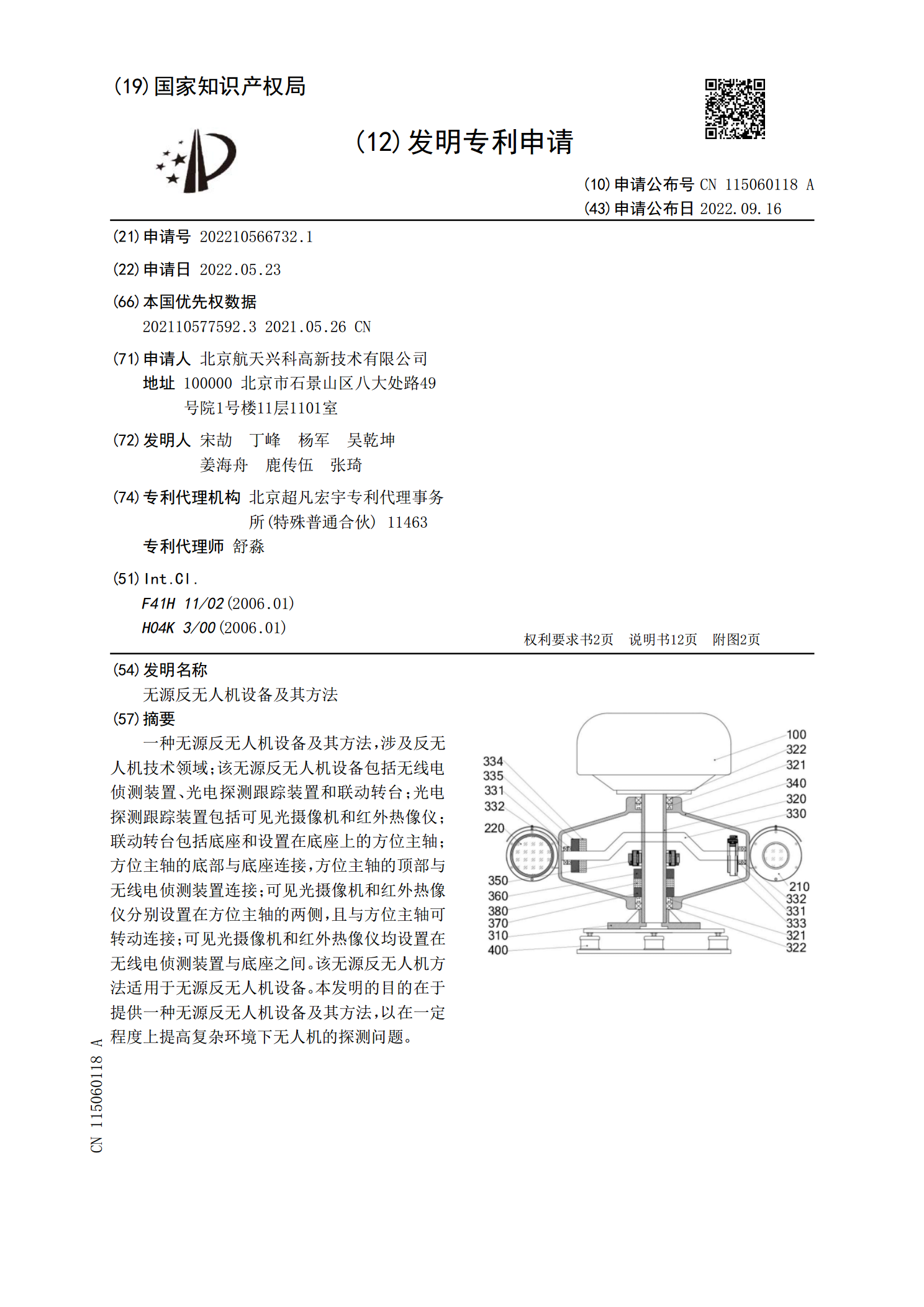
一种无源反无人机设备及其方法,涉及反无人机技术领域;该无源反无人机设备包括无线电侦测装置、光电探测跟踪装置和联动转台;光电探测跟踪装置包括可见光摄像机和红外热像仪;联动转台包括底座和设置在底座上的方位主轴;方位主轴的底部与底座连接,方位主轴的顶部与无线电侦测装置连接;可见光摄像机和红外热像仪分别设置在方位主轴的两侧,且与方位主轴可转动连接;可见光摄像机和红外热像仪均设置在无线电侦测装置与底座之间。该无源反无人机方法适用于无源反无人机设备。本发明的目的在于提供一种无源反无人机设备及其方法,以在一定程度上提高

GPS信号的捕获方法及其捕获装置.pdf
本发明涉及卫星定位接收领域,公开了一种GPS信号的捕获方法及其装置。本发明中,该GPS信号捕获装置包括捕获模块、跟踪模块和控制器,整个捕获过程分为若干轮,在每一轮初始,控制器调整捕获模块的非相干积分或差分合并的累积时间长度,以使得捕获模块和跟踪模块可以在不同的累积时间长度下对部分或者全部待捕卫星进行捕获,可以以较短的累积时间长度来快速地捕获到信号较强的卫星,然后,增加每轮捕获的累积时间长度来捕获到信号较弱的卫星,从而在较短的时间内有效地捕获强、弱GPS信号。此外,根据捕获模块的累积时间长度来调整捕获输出的

能自主供电的反无人机装置.pdf
本发明公开一种能自主供电的反无人机装置,包括风能发电部件、信号干扰部件和支撑柱,风能发电部件设置在支撑柱的顶端,风能发电部件包括壳体、发电机、蓄电池以及转动部件,转动部件包括轮毂和安装在轮毂上的叶片体,发电机和蓄电池均安装在壳体的内部,蓄电池与发电机连接,用于存储发电机转化的电能,轮毂设置在壳体的开口端,发电机的转动轴与轮毂连接,叶片体的内部具有容纳腔,信号干扰部件设置在容纳腔中,信号干扰部件包括电路板、电磁波发生器和电磁波发射天线,电磁波发生器设置在电路板上,电磁波发射天线设置在容纳腔的内侧壁上,电磁波

反无人机蜂群的防空部署方法、装置、设备和介质.pdf
本申请涉及反无人机蜂群的防空部署方法、装置、设备和介质,方法包括:获取无人机蜂群的探测跟踪数据;调用基于遗传算法的火力分配模型,根据探测跟踪数据对火力分配模型进行初始化;利用火力分配模型的适应度函数对全部染色体进行评价,计算并保存适应度值最大的目标染色体;采用轮盘赌选择算法对种群进行淘汰;根据交配概率从种群中选择染色体进行交配操作;根据变异概率从种群中选择染色体进行变异操作;将产生的新种群替换原有的种群,计算新种群中各染色体的适应度值;当前进化代数加1后,若进化代数超过设定的最大进化代数,则输出最优防空部