
一种车底盲区填充方法、装置、系统、存储介质及计算机程序产品.pdf

Ke****67

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车底盲区填充方法、装置、系统、存储介质及计算机程序产品.pdf
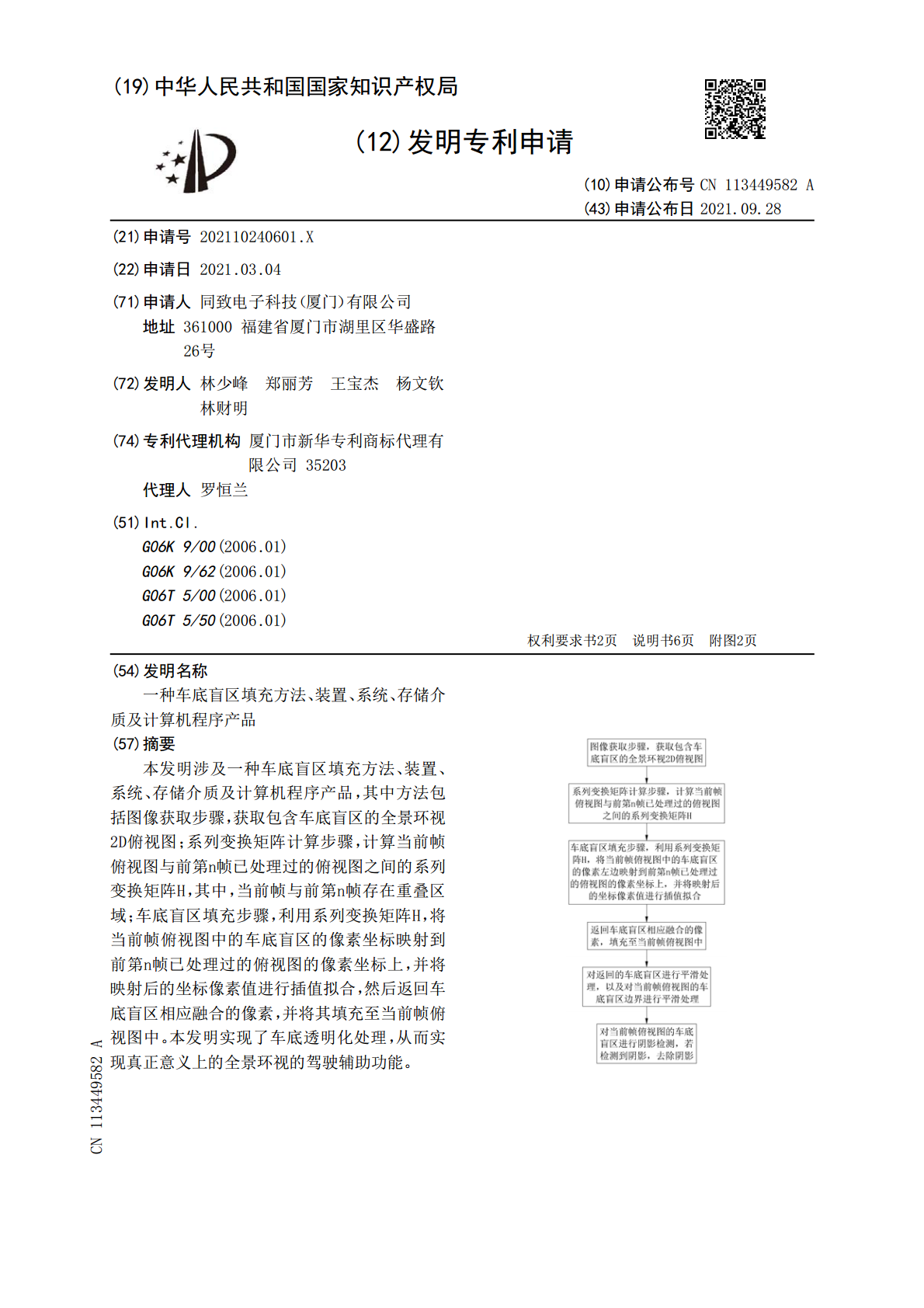
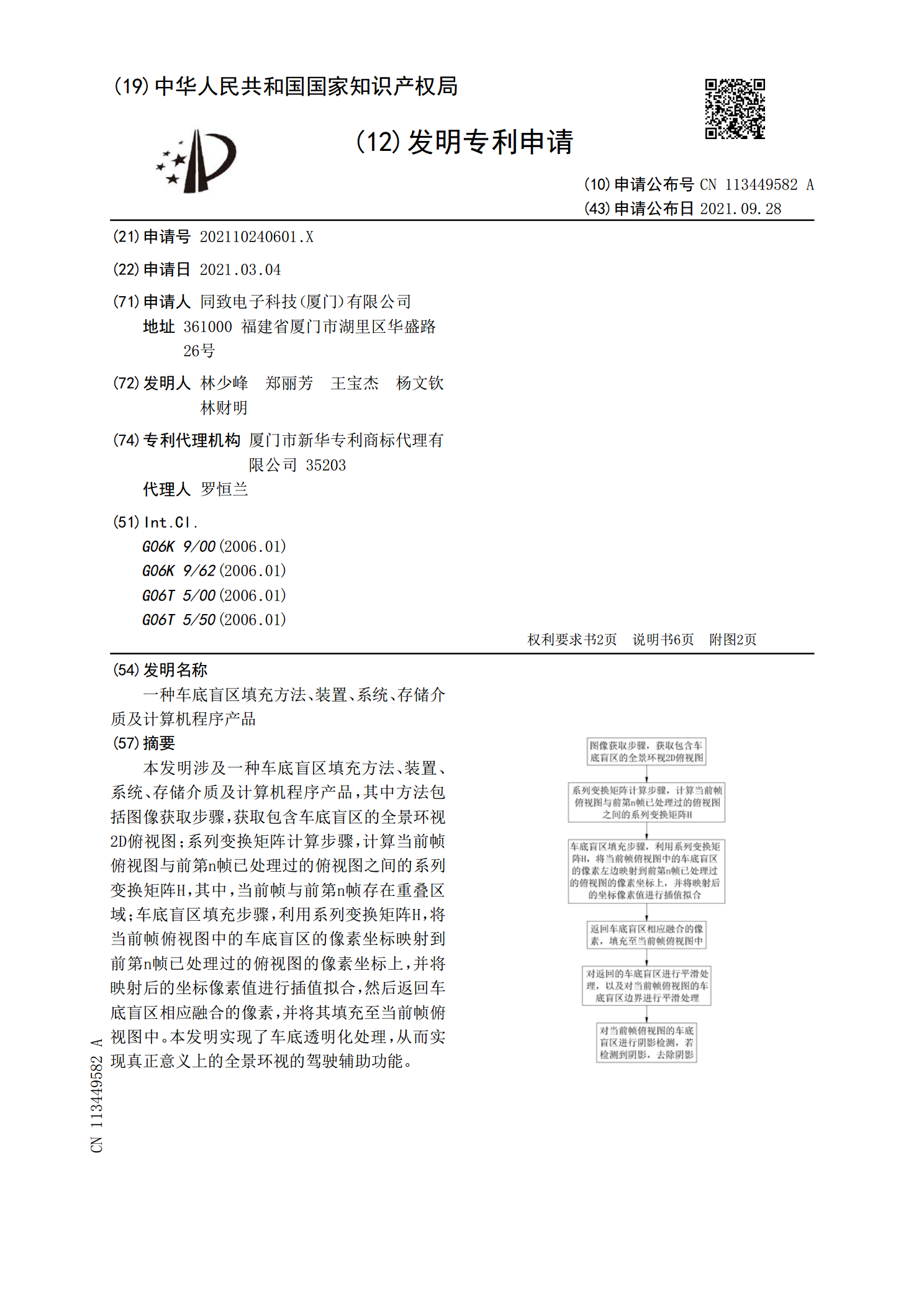
本发明涉及一种车底盲区填充方法、装置、系统、存储介质及计算机程序产品,其中方法包括图像获取步骤,获取包含车底盲区的全景环视2D俯视图;系列变换矩阵计算步骤,计算当前帧俯视图与前第n帧已处理过的俯视图之间的系列变换矩阵H,其中,当前帧与前第n帧存在重叠区域;车底盲区填充步骤,利用系列变换矩阵H,将当前帧俯视图中的车底盲区的像素坐标映射到前第n帧已处理过的俯视图的像素坐标上,并将映射后的坐标像素值进行插值拟合,然后返回车底盲区相应融合的像素,并将其填充至当前帧俯视图中。本发明实现了车底透明化处理,从而实现真正
一种车底盲区填充方法及系统、存储介质、终端设备.pdf
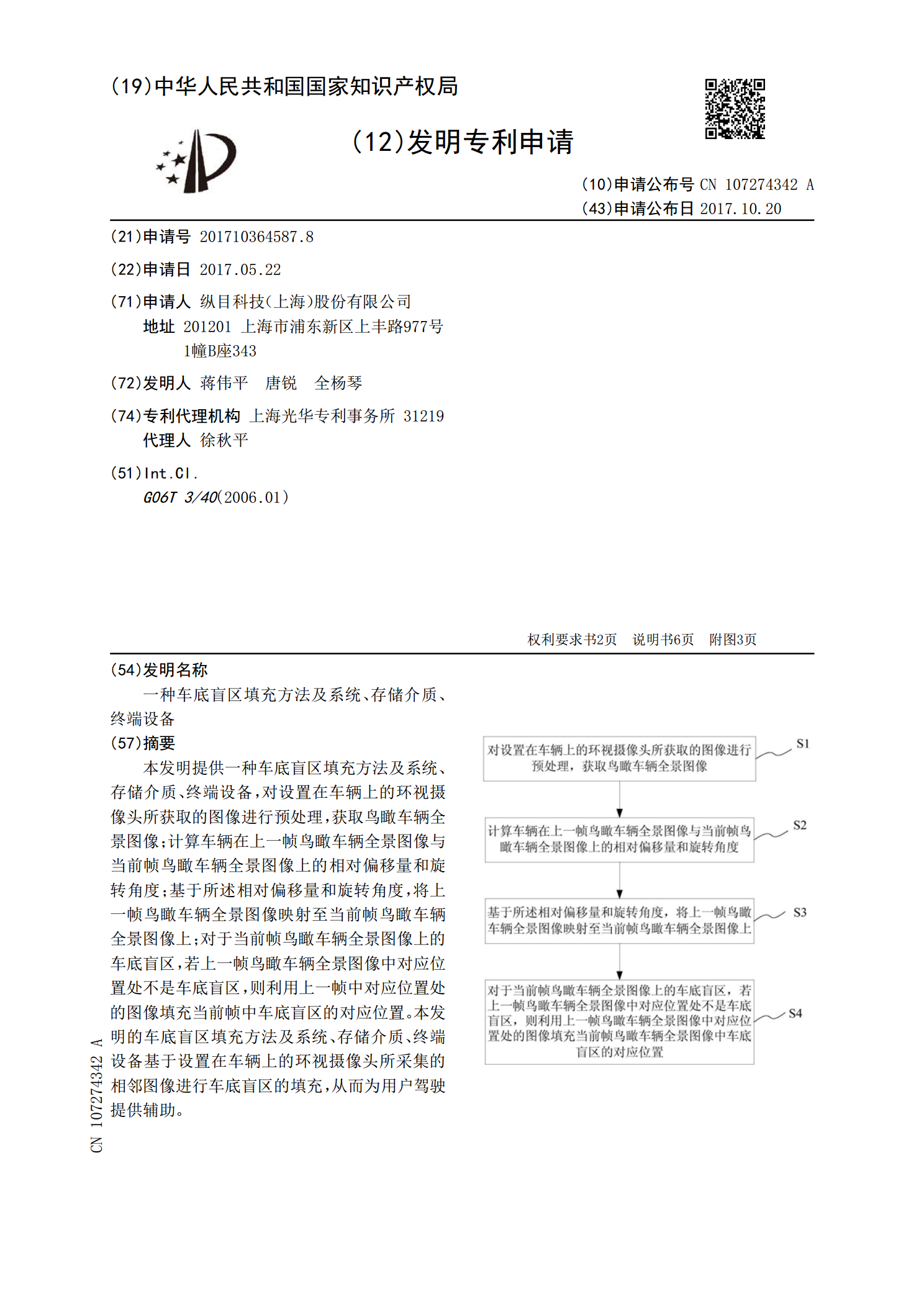
本发明提供一种车底盲区填充方法及系统、存储介质、终端设备,对设置在车辆上的环视摄像头所获取的图像进行预处理,获取鸟瞰车辆全景图像;计算车辆在上一帧鸟瞰车辆全景图像与当前帧鸟瞰车辆全景图像上的相对偏移量和旋转角度;基于所述相对偏移量和旋转角度,将上一帧鸟瞰车辆全景图像映射至当前帧鸟瞰车辆全景图像上;对于当前帧鸟瞰车辆全景图像上的车底盲区,若上一帧鸟瞰车辆全景图像中对应位置处不是车底盲区,则利用上一帧中对应位置处的图像填充当前帧中车底盲区的对应位置。本发明的车底盲区填充方法及系统、存储介质、终端设备基于设置在
一种填充车底盲区的方法和系统.pdf
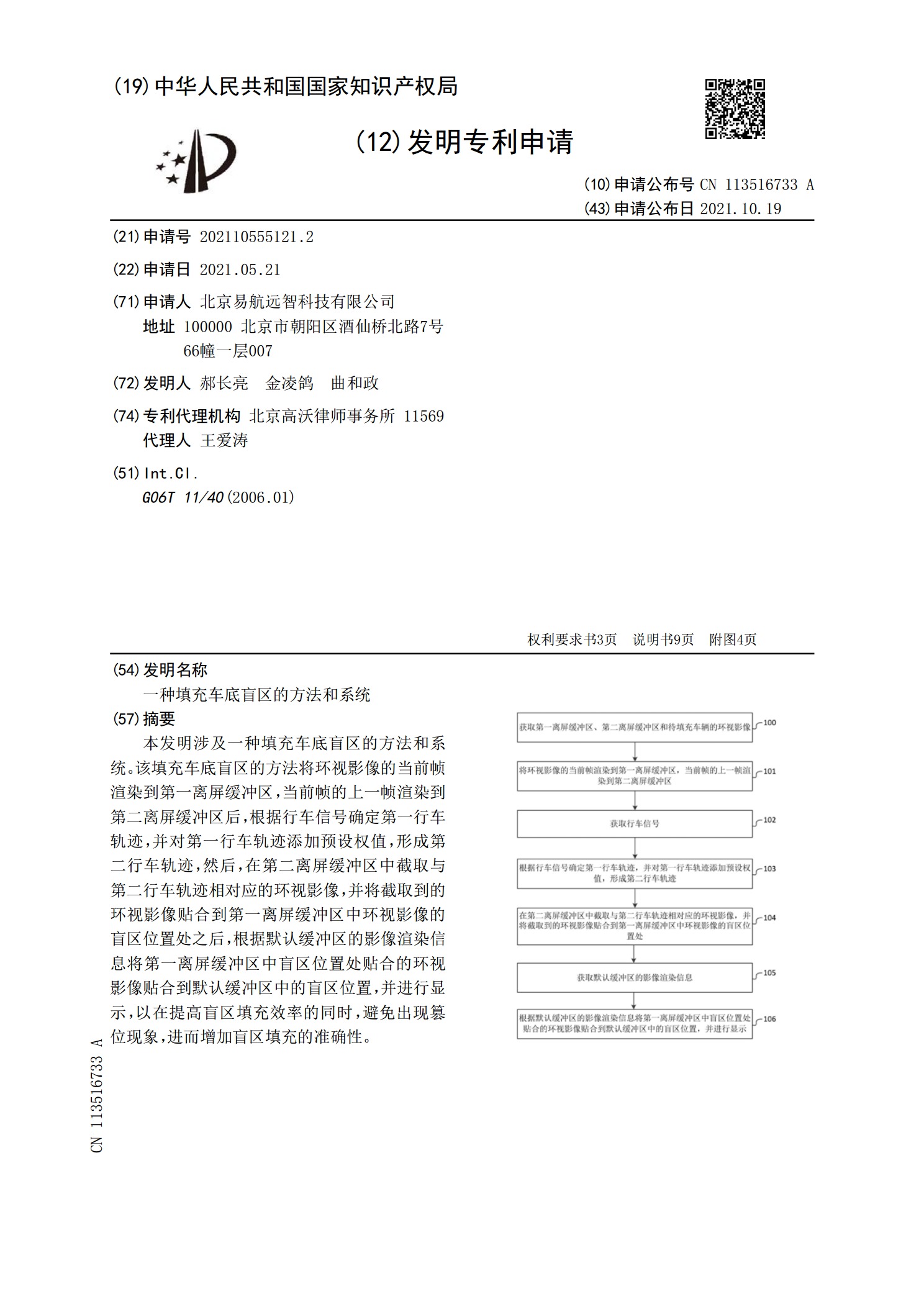
本发明涉及一种填充车底盲区的方法和系统。该填充车底盲区的方法将环视影像的当前帧渲染到第一离屏缓冲区,当前帧的上一帧渲染到第二离屏缓冲区后,根据行车信号确定第一行车轨迹,并对第一行车轨迹添加预设权值,形成第二行车轨迹,然后,在第二离屏缓冲区中截取与第二行车轨迹相对应的环视影像,并将截取到的环视影像贴合到第一离屏缓冲区中环视影像的盲区位置处之后,根据默认缓冲区的影像渲染信息将第一离屏缓冲区中盲区位置处贴合的环视影像贴合到默认缓冲区中的盲区位置,并进行显示,以在提高盲区填充效率的同时,避免出现篡位现象,进而增加
一种渲染方法、装置、系统、存储介质及程序产品.pdf
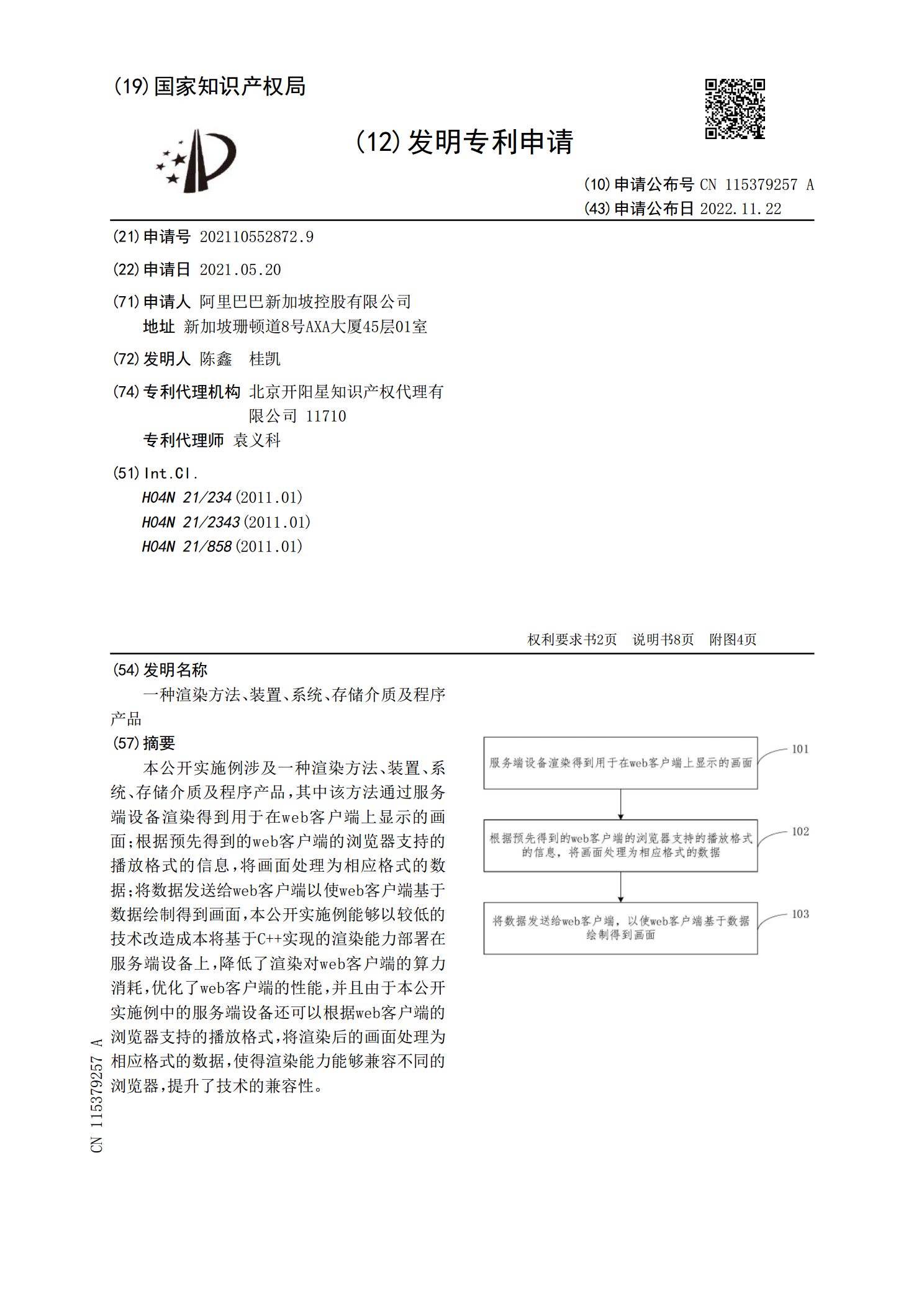
本公开实施例涉及一种渲染方法、装置、系统、存储介质及程序产品,其中该方法通过服务端设备渲染得到用于在web客户端上显示的画面;根据预先得到的web客户端的浏览器支持的播放格式的信息,将画面处理为相应格式的数据;将数据发送给web客户端以使web客户端基于数据绘制得到画面,本公开实施例能够以较低的技术改造成本将基于C++实现的渲染能力部署在服务端设备上,降低了渲染对web客户端的算力消耗,优化了web客户端的性能,并且由于本公开实施例中的服务端设备还可以根据web客户端的浏览器支持的播放格式,将渲染后的画面

一种基于非线性优化的车底透明方法、装置、设备、存储介质及计算机程序产品.pdf
本发明涉及一种基于非线性优化的车底透明方法、装置、设备、存储介质及计算机程序产品,其利用当前帧与前第n帧的俯视图的特征点构建优化函数,并引入车身相对位姿信息进行非线性优化,得到当前帧与前第n帧之间的相对运动信息,然后根据相对运动信息得到变换矩阵,最后利用变换矩阵进行前第n帧与当前帧之间映射,进行当前帧俯视图的盲区填充。本发明引入非线性优化可以提高透明车身效果,且将图像结合车身运动信息,可以提高匹配的效率和可靠性,加快优化收敛,进一步提高车底透明化效果。