
一种激光雷达盲区补偿系统、方法及存储介质.pdf

努力****爱静


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光雷达盲区补偿系统、方法及存储介质.pdf
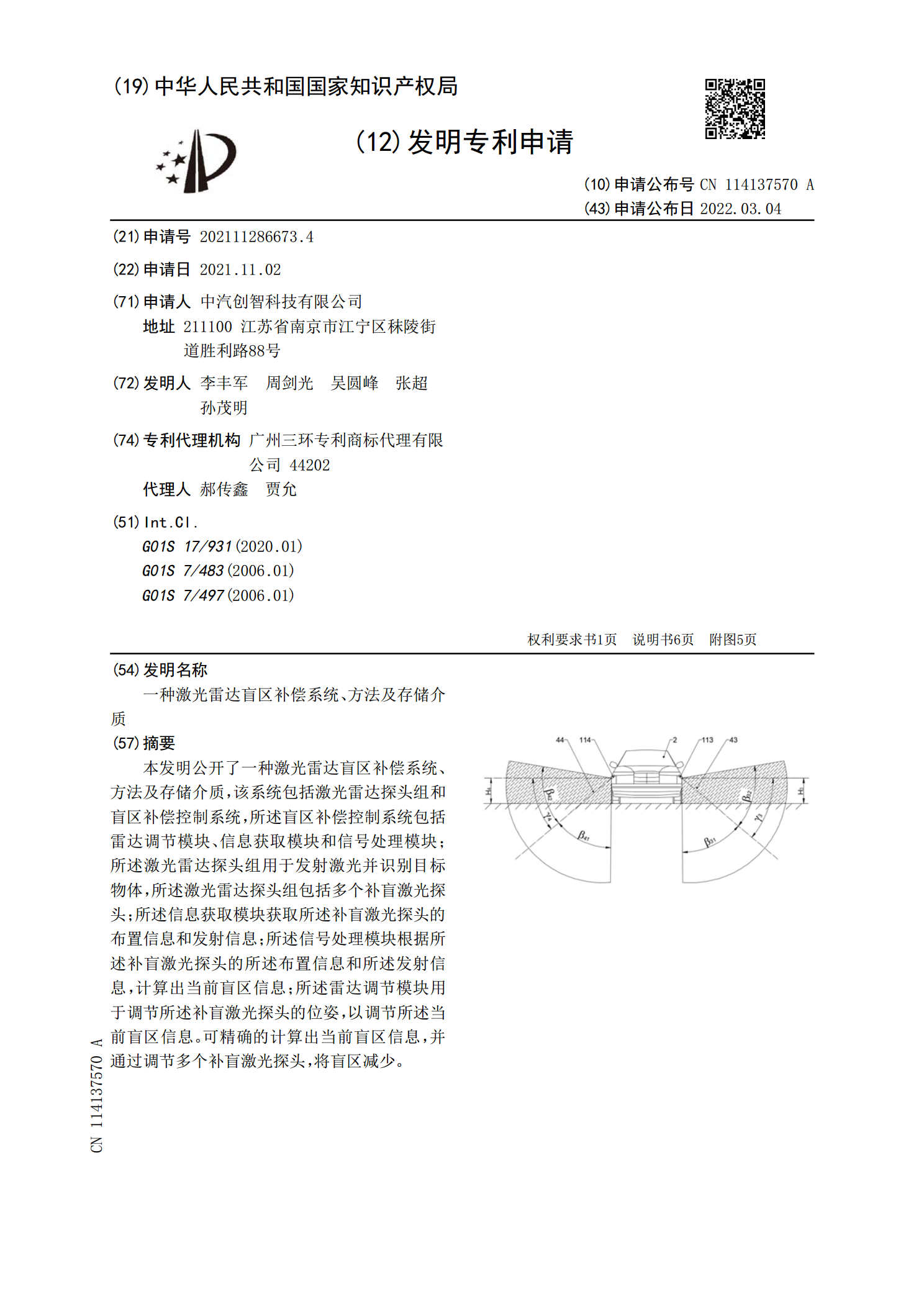
本发明公开了一种激光雷达盲区补偿系统、方法及存储介质,该系统包括激光雷达探头组和盲区补偿控制系统,所述盲区补偿控制系统包括雷达调节模块、信息获取模块和信号处理模块;所述激光雷达探头组用于发射激光并识别目标物体,所述激光雷达探头组包括多个补盲激光探头;所述信息获取模块获取所述补盲激光探头的布置信息和发射信息;所述信号处理模块根据所述补盲激光探头的所述布置信息和所述发射信息,计算出当前盲区信息;所述雷达调节模块用于调节所述补盲激光探头的位姿,以调节所述当前盲区信息。可精确的计算出当前盲区信息,并通过调节多个补
一种智能导航机器、激光雷达盲区补偿方法及存储介质.pdf
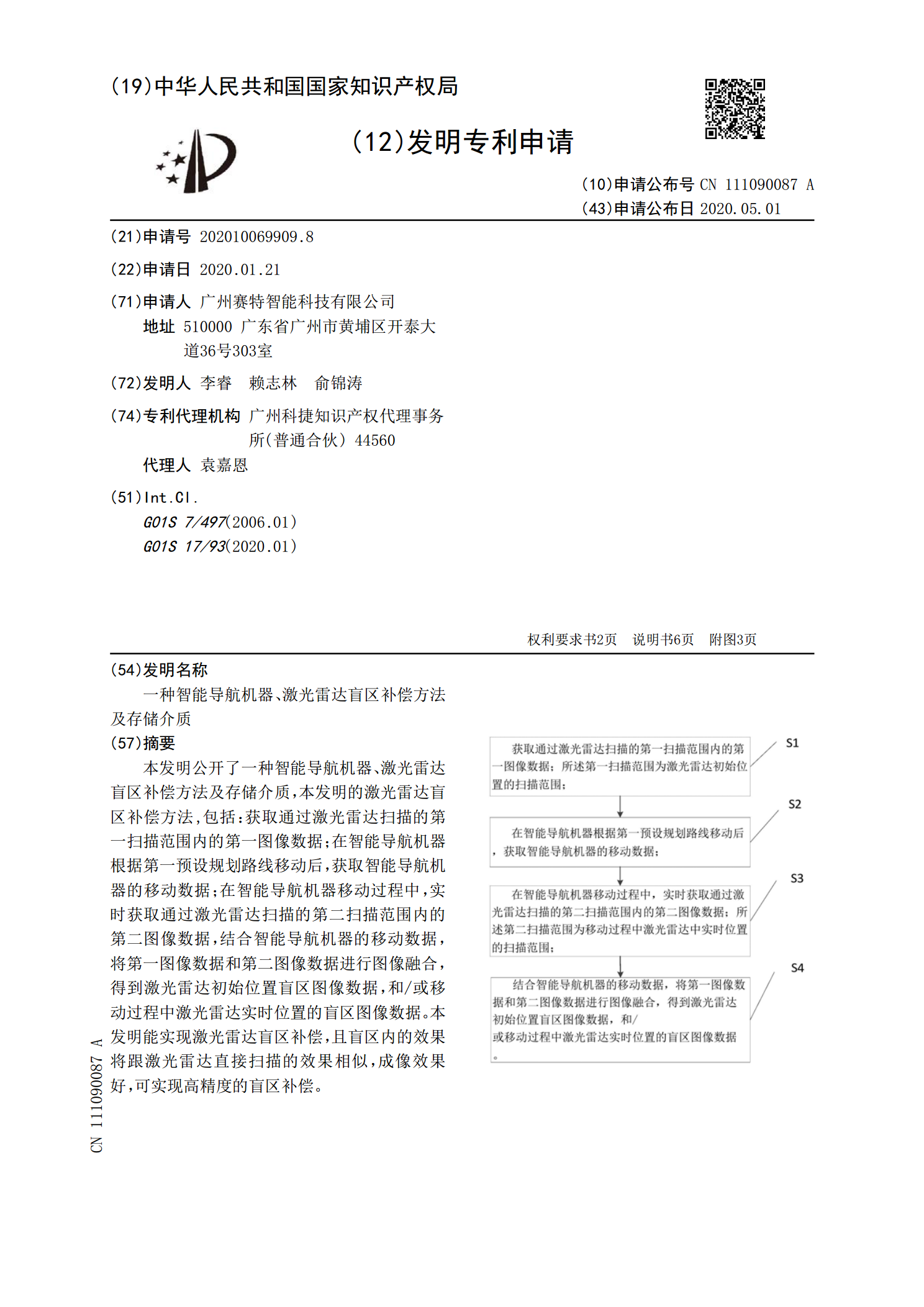
本发明公开了一种智能导航机器、激光雷达盲区补偿方法及存储介质,本发明的激光雷达盲区补偿方法,包括:获取通过激光雷达扫描的第一扫描范围内的第一图像数据;在智能导航机器根据第一预设规划路线移动后,获取智能导航机器的移动数据;在智能导航机器移动过程中,实时获取通过激光雷达扫描的第二扫描范围内的第二图像数据,结合智能导航机器的移动数据,将第一图像数据和第二图像数据进行图像融合,得到激光雷达初始位置盲区图像数据,和/或移动过程中激光雷达实时位置的盲区图像数据。本发明能实现激光雷达盲区补偿,且盲区内的效果将跟激光雷达
盲区监测方法、系统、设备及存储介质.pdf
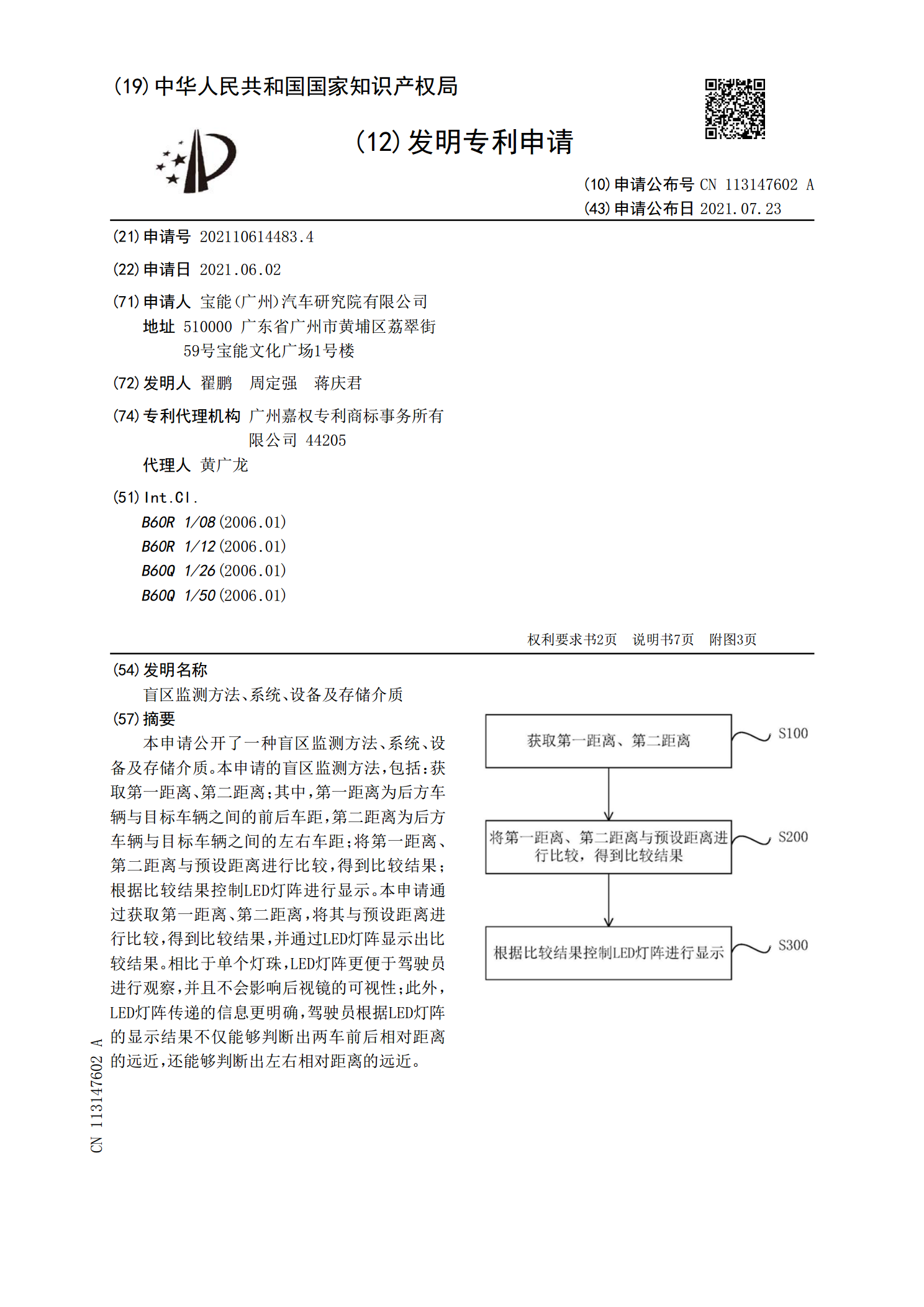
本申请公开了一种盲区监测方法、系统、设备及存储介质。本申请的盲区监测方法,包括:获取第一距离、第二距离;其中,第一距离为后方车辆与目标车辆之间的前后车距,第二距离为后方车辆与目标车辆之间的左右车距;将第一距离、第二距离与预设距离进行比较,得到比较结果;根据比较结果控制LED灯阵进行显示。本申请通过获取第一距离、第二距离,将其与预设距离进行比较,得到比较结果,并通过LED灯阵显示出比较结果。相比于单个灯珠,LED灯阵更便于驾驶员进行观察,并且不会影响后视镜的可视性;此外,LED灯阵传递的信息更明确,驾驶员根
盲区行人检测方法、系统、车辆及存储介质.pdf
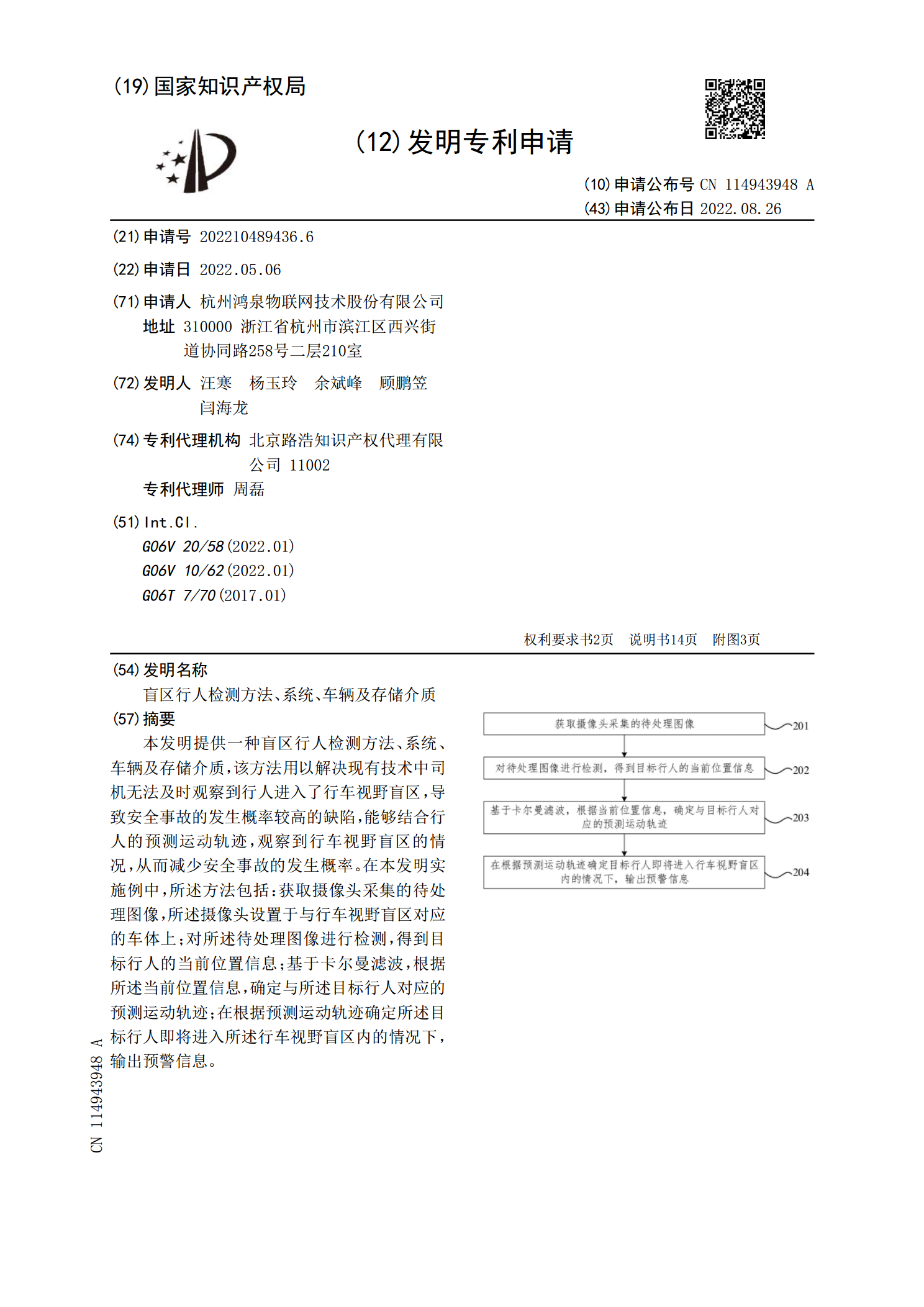
本发明提供一种盲区行人检测方法、系统、车辆及存储介质,该方法用以解决现有技术中司机无法及时观察到行人进入了行车视野盲区,导致安全事故的发生概率较高的缺陷,能够结合行人的预测运动轨迹,观察到行车视野盲区的情况,从而减少安全事故的发生概率。在本发明实施例中,所述方法包括:获取摄像头采集的待处理图像,所述摄像头设置于与行车视野盲区对应的车体上;对所述待处理图像进行检测,得到目标行人的当前位置信息;基于卡尔曼滤波,根据所述当前位置信息,确定与所述目标行人对应的预测运动轨迹;在根据预测运动轨迹确定所述目标行人即将进
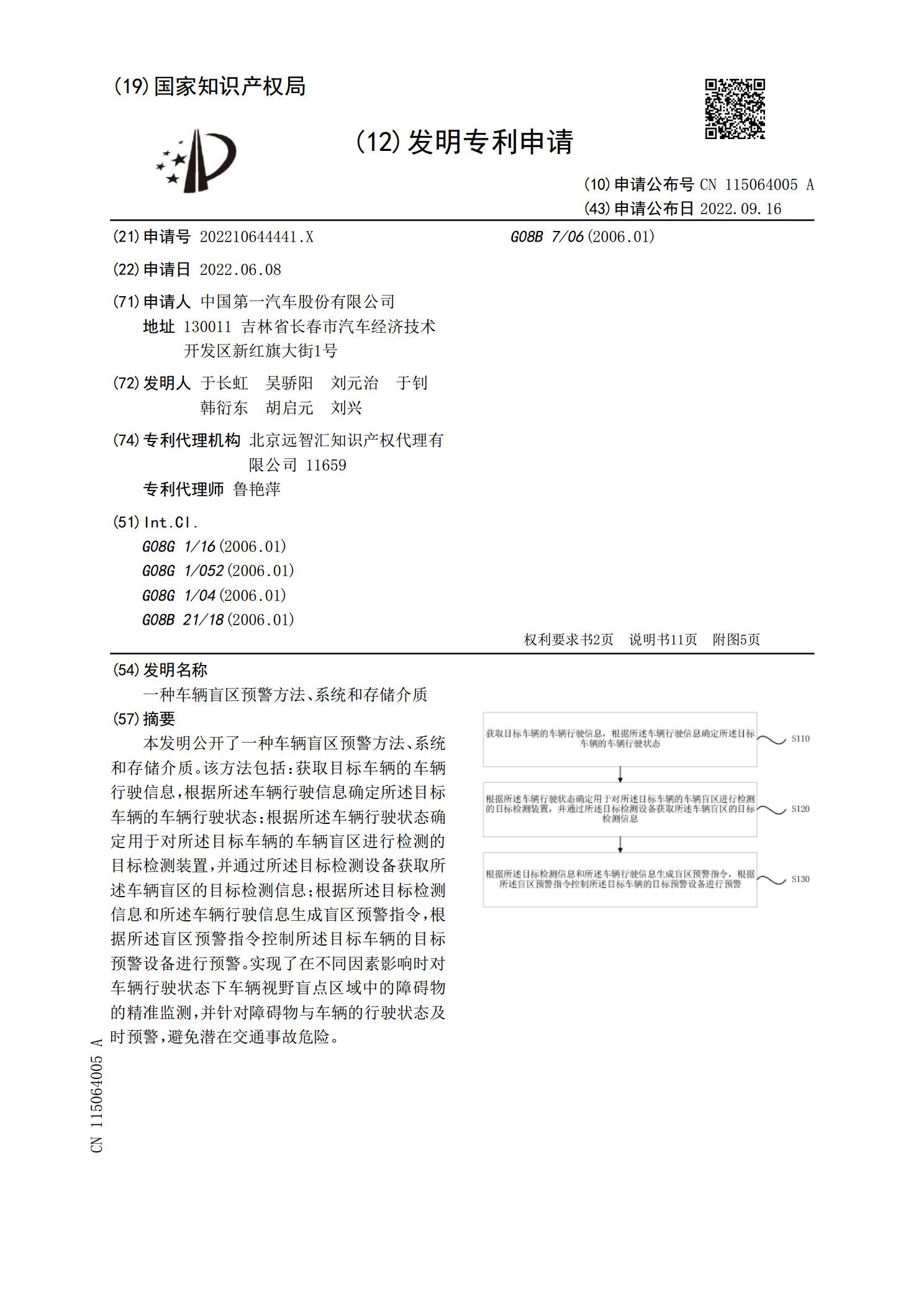
一种车辆盲区预警方法、系统和存储介质.pdf
本发明公开了一种车辆盲区预警方法、系统和存储介质。该方法包括:获取目标车辆的车辆行驶信息,根据所述车辆行驶信息确定所述目标车辆的车辆行驶状态;根据所述车辆行驶状态确定用于对所述目标车辆的车辆盲区进行检测的目标检测装置,并通过所述目标检测设备获取所述车辆盲区的目标检测信息;根据所述目标检测信息和所述车辆行驶信息生成盲区预警指令,根据所述盲区预警指令控制所述目标车辆的目标预警设备进行预警。实现了在不同因素影响时对车辆行驶状态下车辆视野盲点区域中的障碍物的精准监测,并针对障碍物与车辆的行驶状态及时预警,避免潜在