
基于分数阶相关熵和分数阶梯度的恒模盲均衡方法.pdf

一吃****天材

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于分数阶相关熵和分数阶梯度的恒模盲均衡方法.pdf
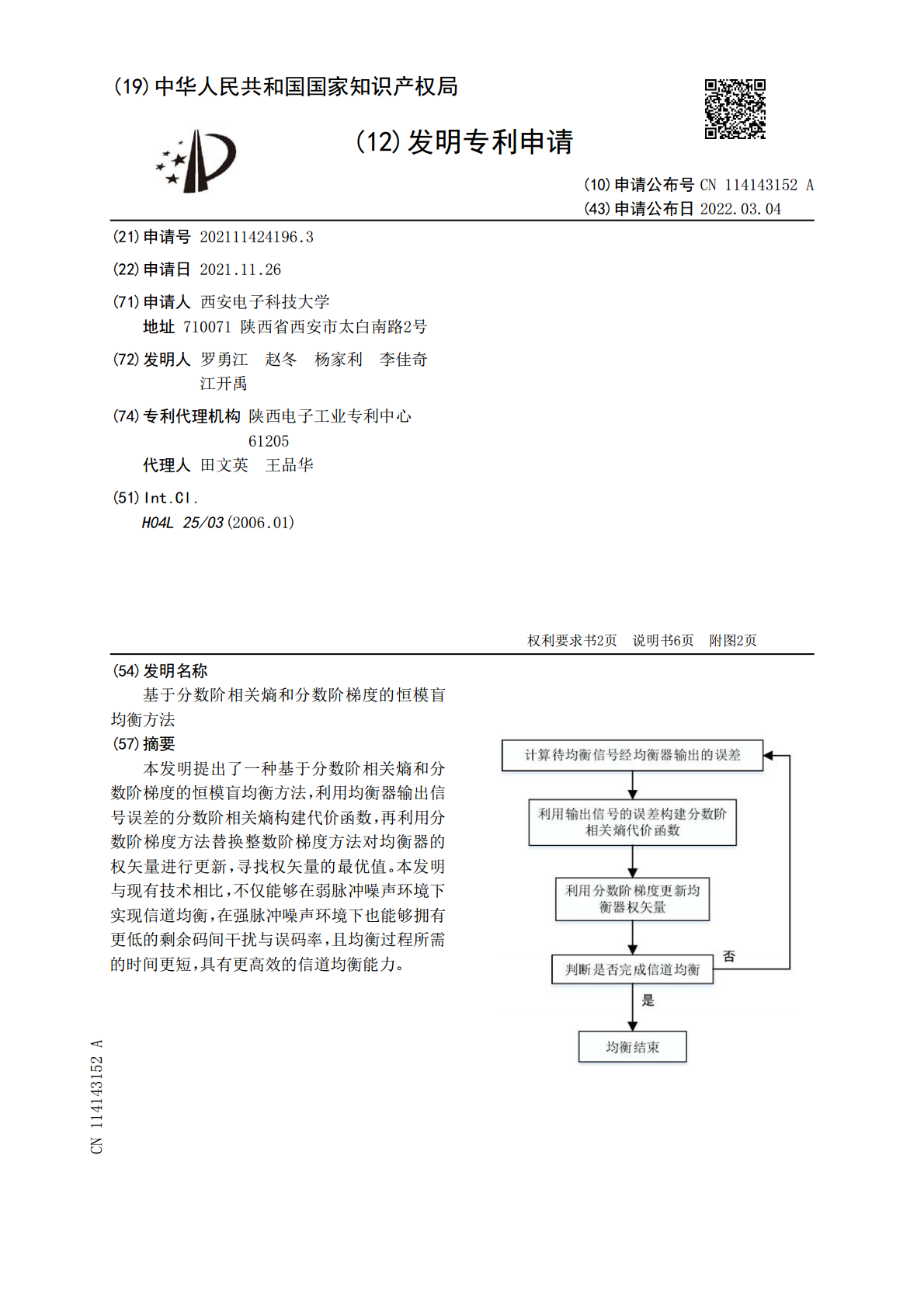
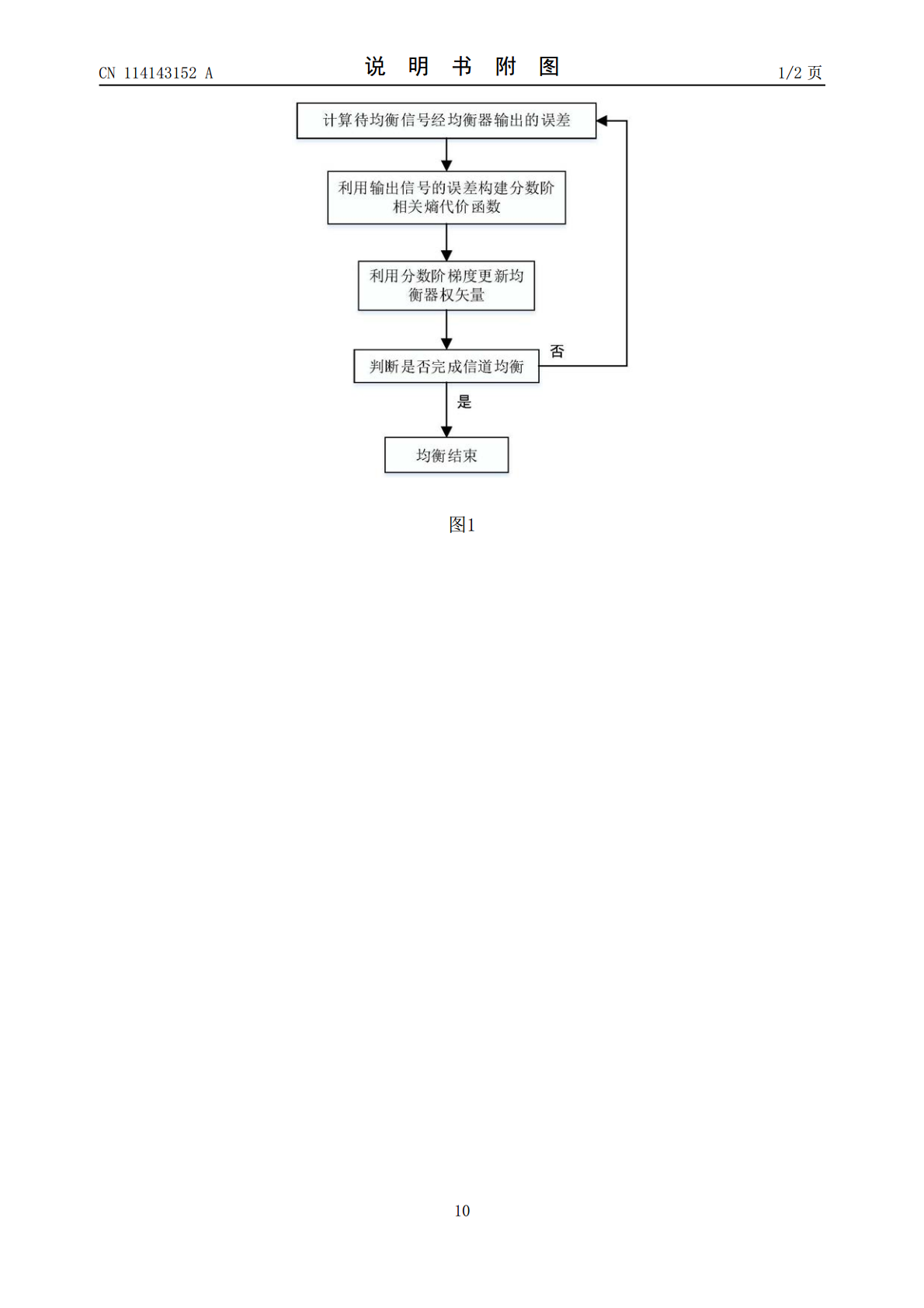
本发明提出了一种基于分数阶相关熵和分数阶梯度的恒模盲均衡方法,利用均衡器输出信号误差的分数阶相关熵构建代价函数,再利用分数阶梯度方法替换整数阶梯度方法对均衡器的权矢量进行更新,寻找权矢量的最优值。本发明与现有技术相比,不仅能够在弱脉冲噪声环境下实现信道均衡,在强脉冲噪声环境下也能够拥有更低的剩余码间干扰与误码率,且均衡过程所需的时间更短,具有更高效的信道均衡能力。
基于分数阶多模的信道盲均衡方法.pdf
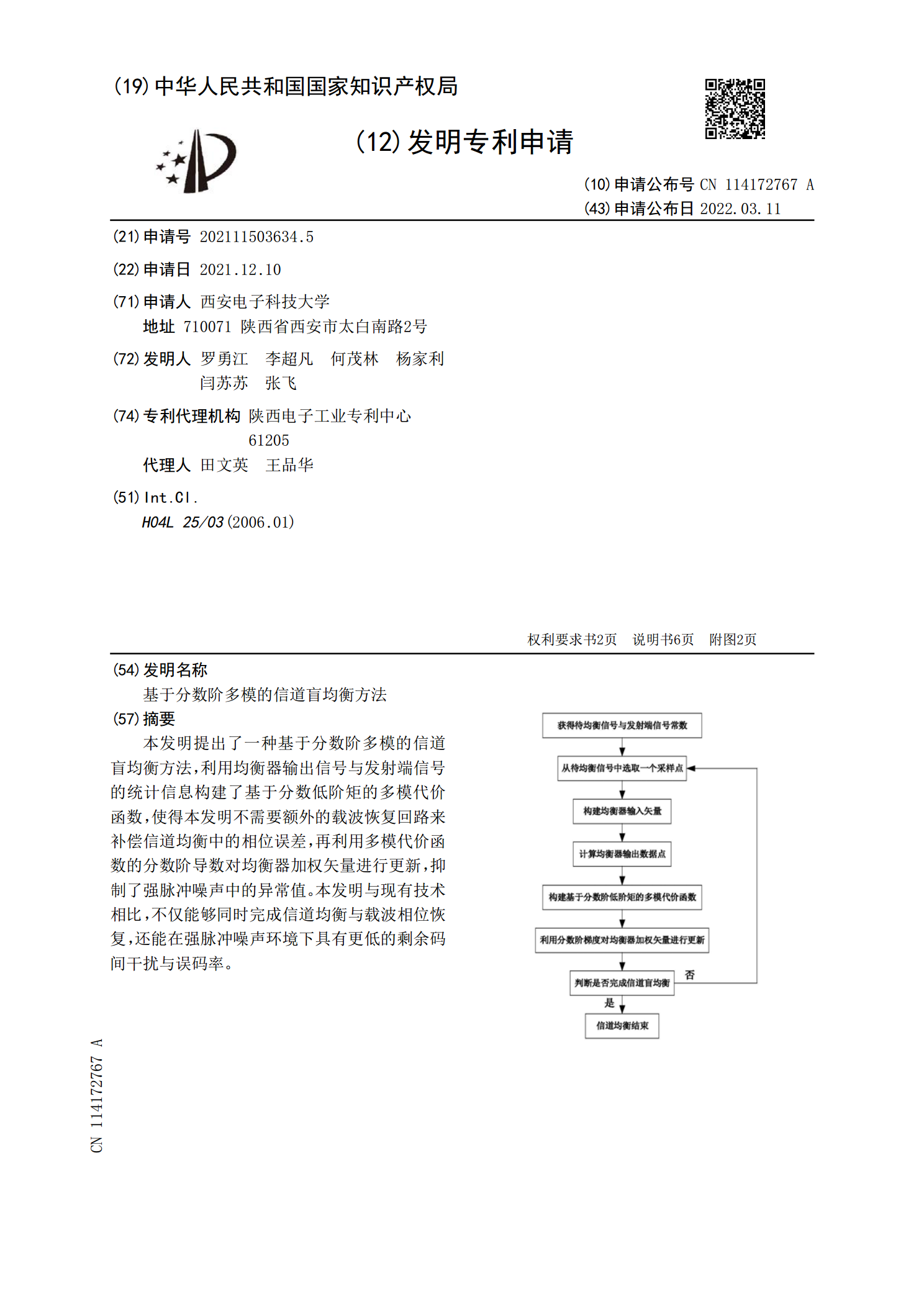
本发明提出了一种基于分数阶多模的信道盲均衡方法,利用均衡器输出信号与发射端信号的统计信息构建了基于分数低阶矩的多模代价函数,使得本发明不需要额外的载波恢复回路来补偿信道均衡中的相位误差,再利用多模代价函数的分数阶导数对均衡器加权矢量进行更新,抑制了强脉冲噪声中的异常值。本发明与现有技术相比,不仅能够同时完成信道均衡与载波相位恢复,还能在强脉冲噪声环境下具有更低的剩余码间干扰与误码率。
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf
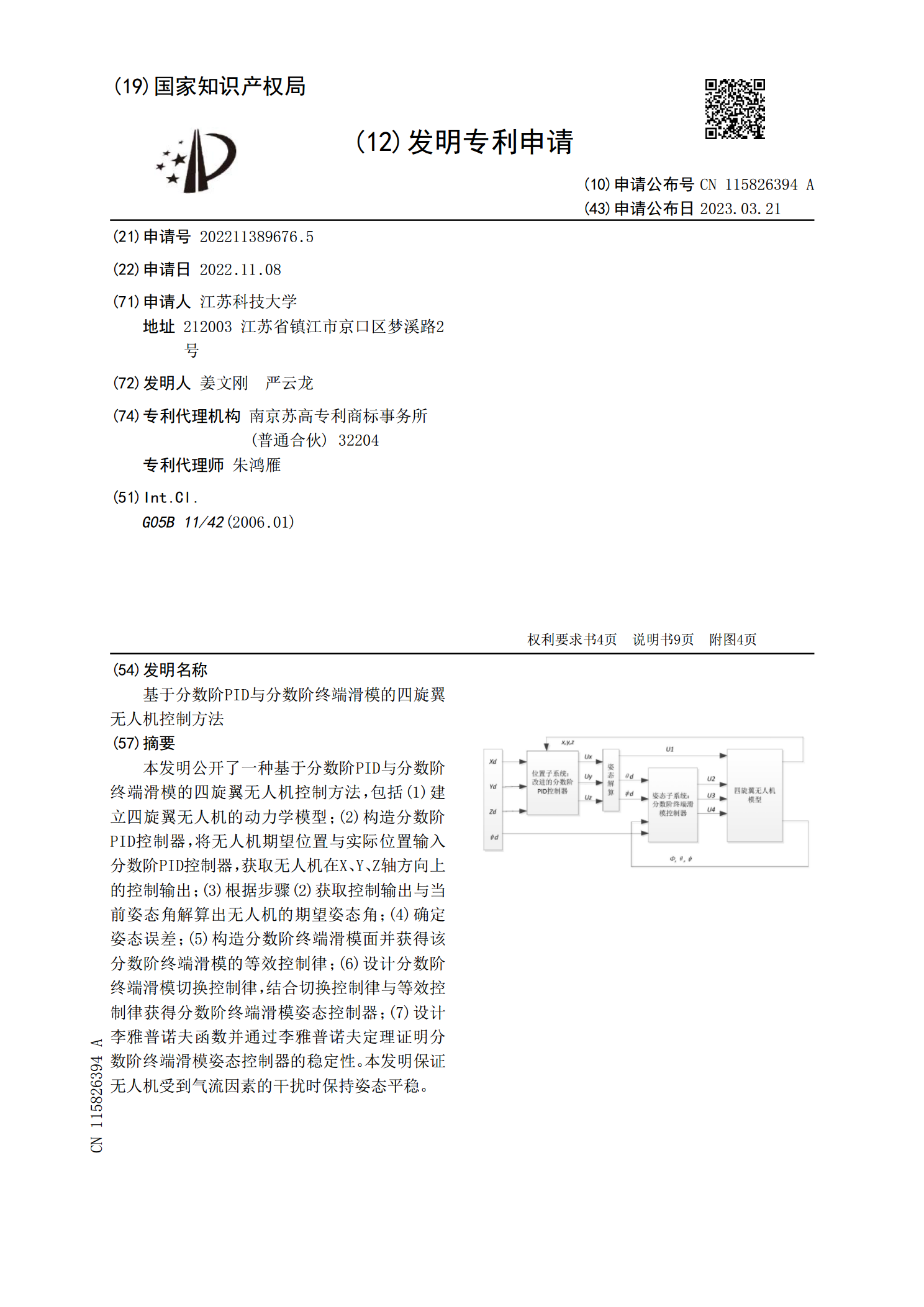
本发明公开了一种基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法,包括(1)建立四旋翼无人机的动力学模型;(2)构造分数阶PID控制器,将无人机期望位置与实际位置输入分数阶PID控制器,获取无人机在X、Y、Z轴方向上的控制输出;(3)根据步骤(2)获取控制输出与当前姿态角解算出无人机的期望姿态角;(4)确定姿态误差;(5)构造分数阶终端滑模面并获得该分数阶终端滑模的等效控制律;(6)设计分数阶终端滑模切换控制律,结合切换控制律与等效控制律获得分数阶终端滑模姿态控制器;(7)设计李雅普诺夫函数并通过李

基于分数阶滑模观测器的PMSM分数阶积分滑模控制(英文).docx
基于分数阶滑模观测器的PMSM分数阶积分滑模控制(英文)Title:Fractional-OrderSliding-ModeObserver-BasedFractional-OrderIntegralSliding-ModeControlforPMSMAbstract:Inrecentyears,permanentmagnetsynchronousmotors(PMSMs)havegainedsignificantattentioninvariousindustrialapplicationsduetot

基于分数阶二阶滑模的PMSM转速控制.pptx
基于分数阶二阶滑模的PMSM转速控制01添加章节标题分数阶二阶滑模控制原理分数阶微积分定义二阶滑模控制原理分数阶二阶滑模控制算法永磁同步电机(PMSM)转速控制概述PMSM的工作原理PMSM的数学模型PMSM的转速控制方法基于分数阶二阶滑模的PMSM转速控制系统设计系统整体架构控制器设计参数整定方法系统仿真验证实验结果与分析实验平台介绍实验结果展示结果分析与传统方法的比较结论与展望研究结论研究的不足与展望感谢观看