
一种基于图像融合的车端全景视角辅助驾驶系统.pdf

元枫****文章

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于图像融合的车端全景视角辅助驾驶系统.pdf
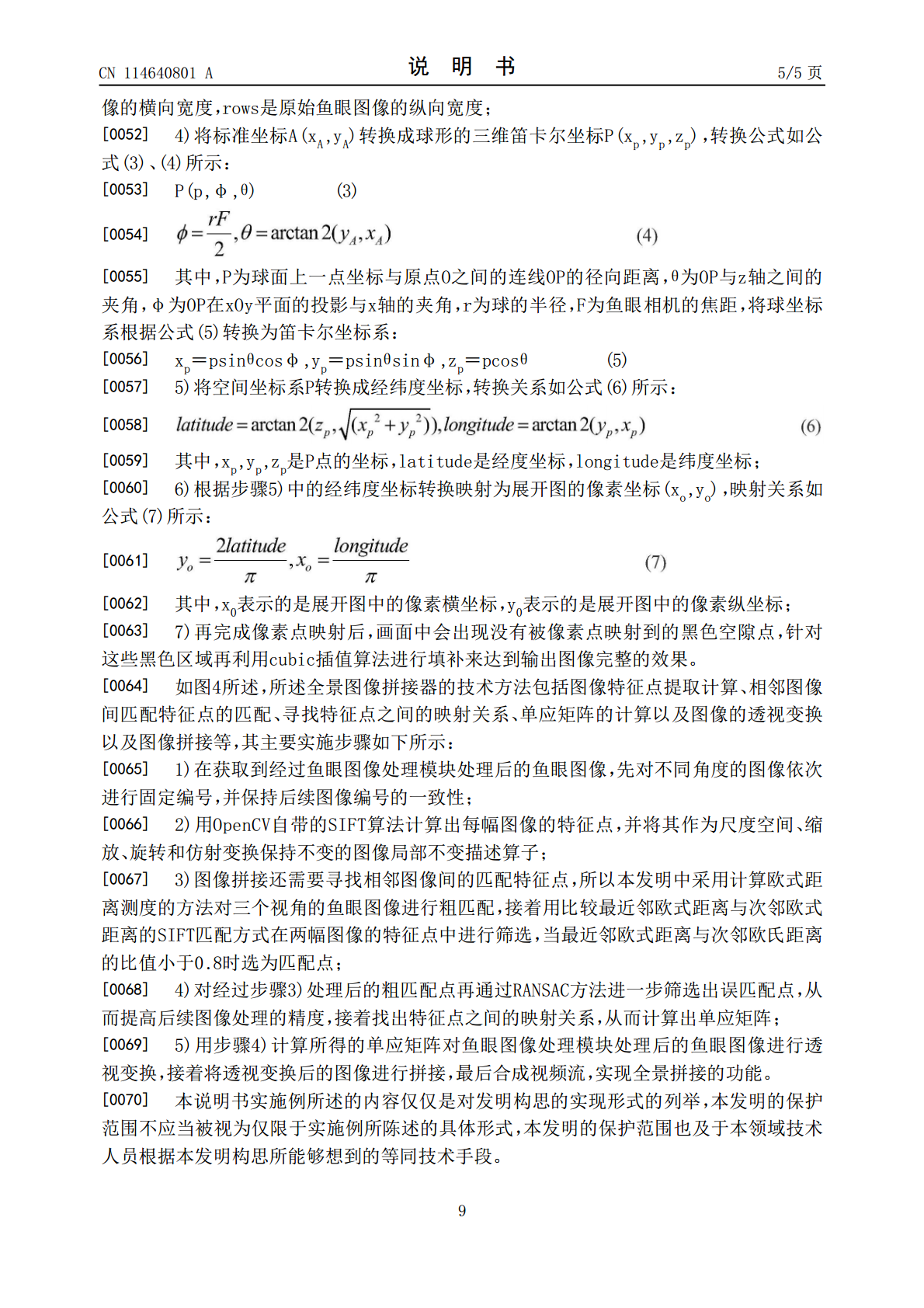
一种基于图像融合的车端全景视角辅助驾驶系统,包括:用于采集车身周围360°道路信息的图像采集模块,用来实时处理图像采集模块输出图像的嵌入式图像处理设备,以及用于显示车端全景图像的图像显示设备。其中,嵌入式图像处理设备与其他两种设备之间用线缆建立物理连接;使用三个安装在车辆上不同位置且视角为180°的鱼眼摄像机采集图像,并采用视频编码器和视频采集卡将多路模拟视频图像整合成一路。嵌入式图像处理设备将整合后的数字视频图像经过鱼眼图像处理模块以及全景图像拼接器,将三个不同角度的数字视频图像拼接成一个全景图像,并通

基于多图像传感器融合的全景泊车辅助系统研究.docx
基于多图像传感器融合的全景泊车辅助系统研究全景泊车辅助系统是一种应用于车辆上的辅助驾驶系统,它通过多个摄像头捕捉车辆周围情况,将多个图像进行融合,并生成全景视图,使驾驶员可以更清晰地观察车辆周围环境,辅助完成停车和调整车辆位置的操作。本文将从系统结构、多图像传感器融合和优化算法等方面,探讨如何提高全景泊车辅助系统的性能。一、系统结构全景泊车辅助系统包括多个摄像头、传感器、显卡、处理器等组成部分。其中,多个摄像头是系统的核心部分,摄像头可以以不同角度捕捉车辆周围情况,并将多个图像传输到处理器上。处理器通过多

一种基于车联网的辅助驾驶系统.pdf
本发明公开了辅助驾驶系统技术领域的一种基于车联网的辅助驾驶系统,包括中控台,还包括:均与中控台电性连接的测距机构,均与中控台固定连接的灯光感应器,以及均与中控台固定连接的摄像机构,其结构合理,本发明设有测距机构可在驾驶员停车时检测车辆与停车区域边界线距离来帮助驾驶员判断车辆是否停放在停车区域中心,避免车辆停放位置不正确影响周边车辆,设有灯光感应器可检测后方车辆灯光是否闪动以实现驾驶员可判断出后方车辆的转向动作,设有摄像机构可在车转向时拍摄驾驶员盲区画面以辅助驾驶员进行转向。

基于DSP的全景视觉辅助驾驶系统的研究.docx
基于DSP的全景视觉辅助驾驶系统的研究随着科技的不断发展,人类生活的各个领域也在不断地发生着变化。汽车行业作为现代人们日常生活中必不可少的交通工具,一直在不断地进行改革和创新,推动着整个行业的发展。其中,全景视觉辅助驾驶系统作为汽车行业近年来发展的热门方向之一,备受关注。本文将从DSP技术出发,介绍全景视觉辅助驾驶系统的研究。一、全景视觉辅助驾驶系统简介全景视觉辅助驾驶系统是一种辅助驾驶技术,其核心是通过多种传感器获取车辆周围环境信息,将数据进行处理分析并反馈给驾驶员,从而提升驾驶员对车辆周围环境的感知能

一种基于权重掩膜的全景环视系统及全景图像融合方法.pdf
本发明涉及一种基于权重掩膜的全景环视系及全景图像融合方法,属于辅助驾驶领域。系统包括多个鱼眼摄像头、角度传感器、图像数据采集器、图像数据处理器和显示屏;鱼眼摄像头用于采集车外环境图像;角度传感器用于采集车间夹角数据;图像数据采集器用于将收集到的车外环境图像和车间夹角数据传输至图像数据处理器;图像数据处理器用于采用权重掩膜处理方法对车外环境图像和车间夹角数据进行处理,生成全景环视图像;显示屏用于显示全景环视图像。本发明能够较好地将多个鱼眼摄像头的图像融合,视野范围大并且没有视野盲区,保障车辆的安全驾驶。