
一种路侧激光雷达超视距感知系统及其工作方法.pdf

努力****元恺


1/9

2/9
3/9
4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种路侧激光雷达超视距感知系统及其工作方法.pdf
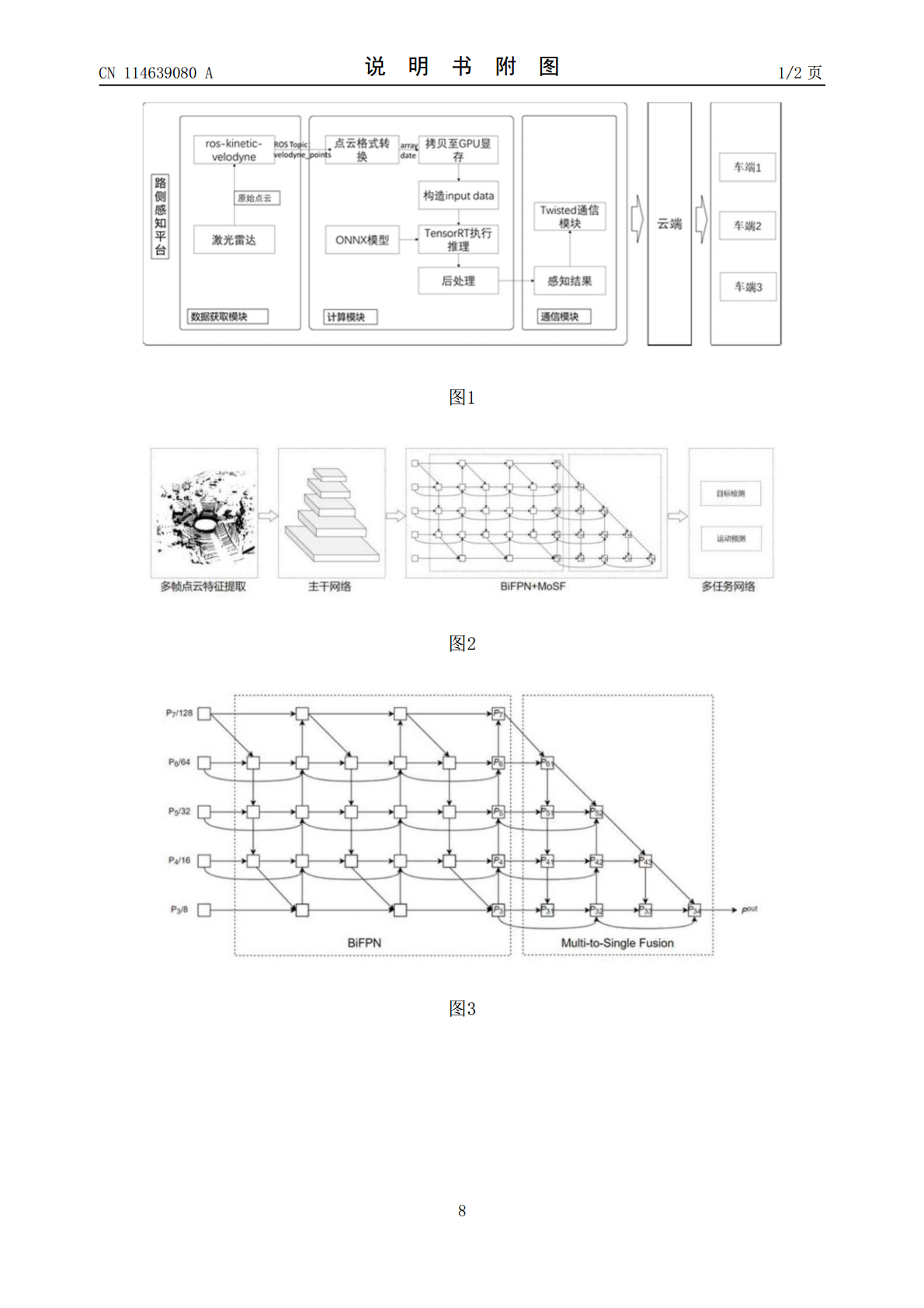
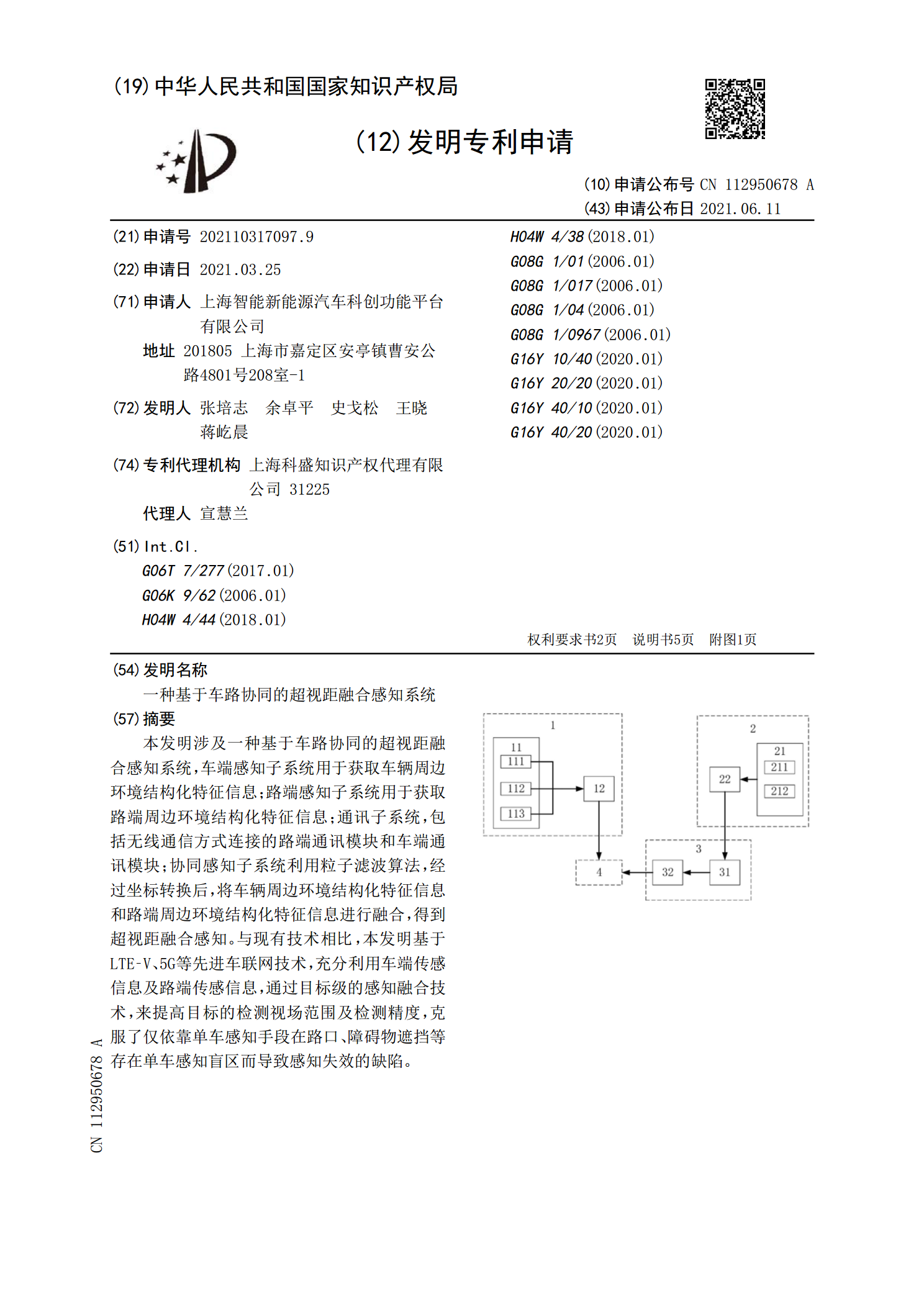
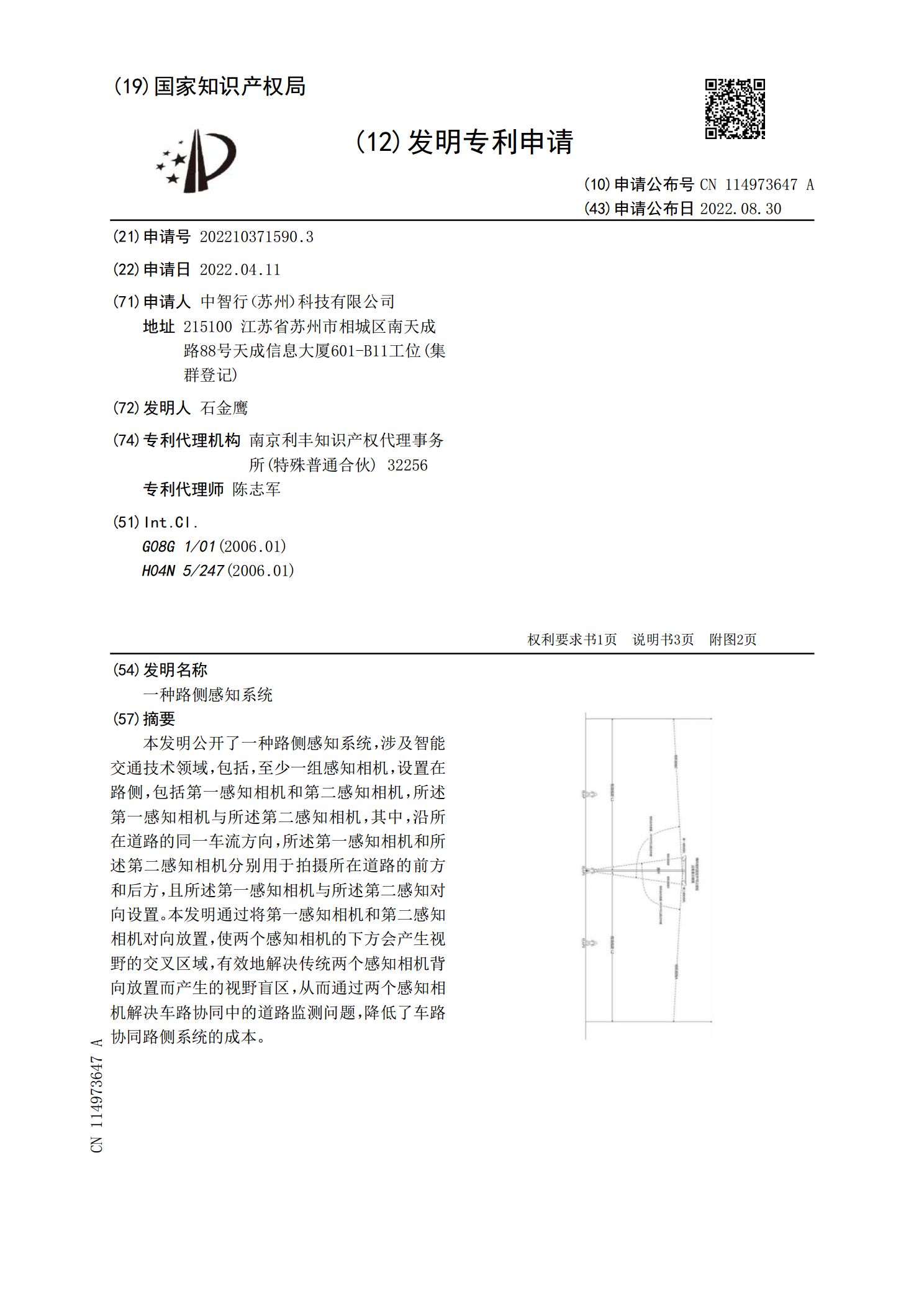
本发明公开了一种路侧激光雷达超视距感知系统及其工作方法。系统包括:激光雷达、边缘低功耗计算平台、通信模块、电源模块和云端服务器。所述的边缘低功耗计算平台包括预处理模块,主干网络和多任务模块。当车辆、行人等目标物体进入路侧激光雷达超视距感知系统的感知范围时,路侧激光雷达超视距感知系统计算出路侧感知结果发送至云端服务器;云端服务器获取路侧感知结果后,一方面将其作为实时交通状态的来源数据;另一方面将路侧感知结果,分发给路侧激光雷达超视距感知系统覆盖范围内的车辆,使车辆获取路侧的感知结果,实现超视距感知。本发明可
一种基于车路协同的超视距融合感知系统.pdf
本发明涉及一种基于车路协同的超视距融合感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块和车端通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息和路端周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比,本发明基于LTE‑V、5G等先进车联网技术,充分利用车端传感信息及路端传感信息,通过目标级的感知融合技术,来提高目标的检测视场范围及检测精度,克服了仅

一种基于车、路、无人机信息融合的超视距感知系统.pdf
本发明涉及一种基于车、路、无人机信息融合的超视距感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;无人机子系统在保证安全的前提下在两个路端子系统中进行长时间短距离飞行主要用于获取两个路端盲区周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块、车端通讯模块以及无人机通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息、路端和无人机周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比
一种路侧感知系统.pdf
本发明公开了一种路侧感知系统,涉及智能交通技术领域,包括,至少一组感知相机,设置在路侧,包括第一感知相机和第二感知相机,所述第一感知相机与所述第二感知相机,其中,沿所在道路的同一车流方向,所述第一感知相机和所述第二感知相机分别用于拍摄所在道路的前方和后方,且所述第一感知相机与所述第二感知对向设置。本发明通过将第一感知相机和第二感知相机对向放置,使两个感知相机的下方会产生视野的交叉区域,有效地解决传统两个感知相机背向放置而产生的视野盲区,从而通过两个感知相机解决车路协同中的道路监测问题,降低了车路协同路侧系

路侧感知系统.pdf
本申请公开了一种路侧感知系统,具体涉及车联网技术,可用于智能交通,包括:至少一组感知相机,每组感知相机包括第一感知相机,第二感知相机以及第三感知相机。每一组感知相机设置在同一车流方向的道路路口的停止线上空,其中,第一感知相机和第二感知相机设置分别用于拍摄所述道路前方和后方,所述第三感知相机用于拍摄所述道路中所述第一感知相机与所述第二感知相机的拍摄盲区。该系统提供一种车路协同场景下的在道路上感知设备的布置方案,可在车路协同场景下对路口经过的车辆以及其他物体进行数据的采集。