
一种基于车、路、无人机信息融合的超视距感知系统.pdf

是你****元呀


1/9

2/9

3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于车、路、无人机信息融合的超视距感知系统.pdf
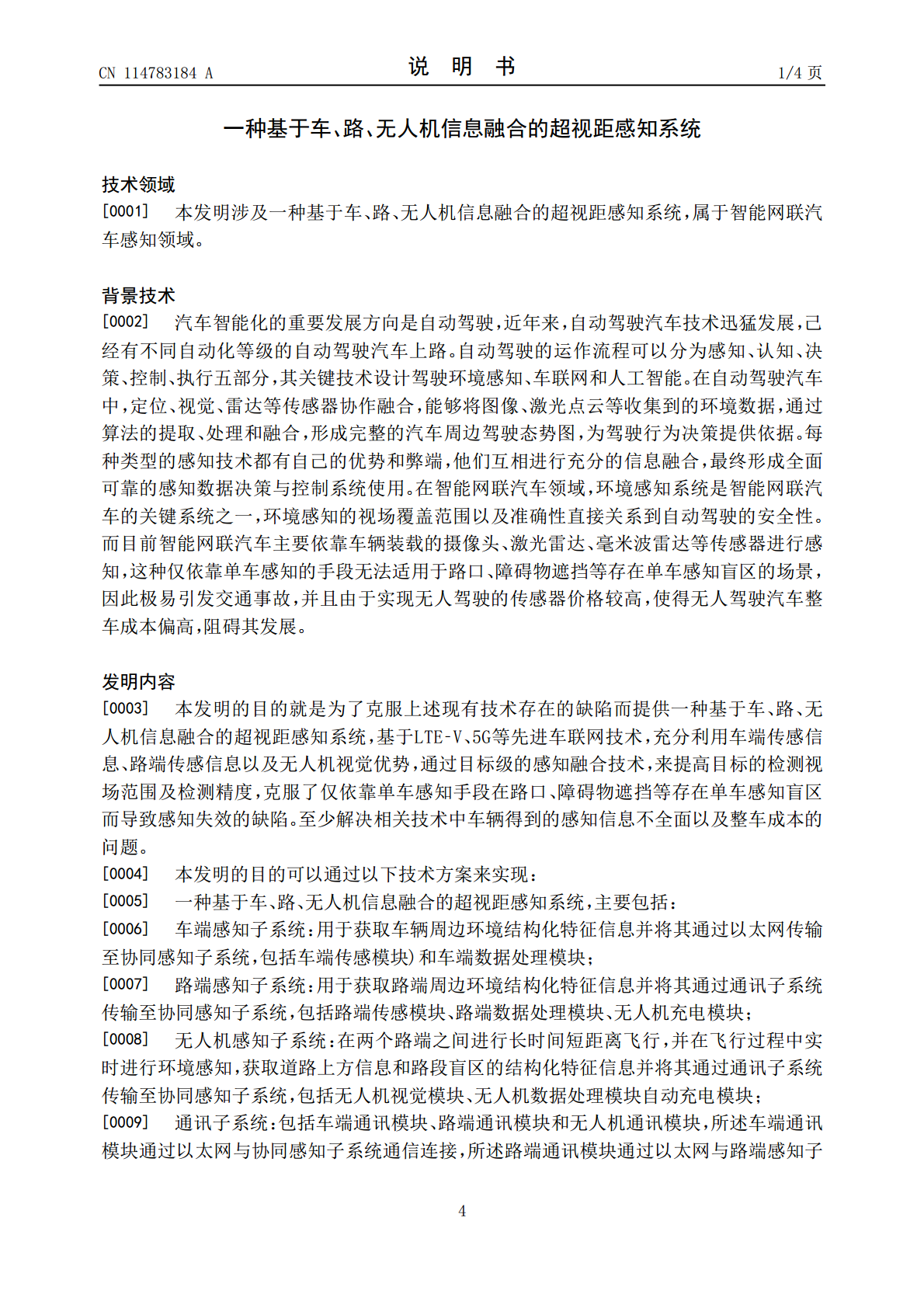
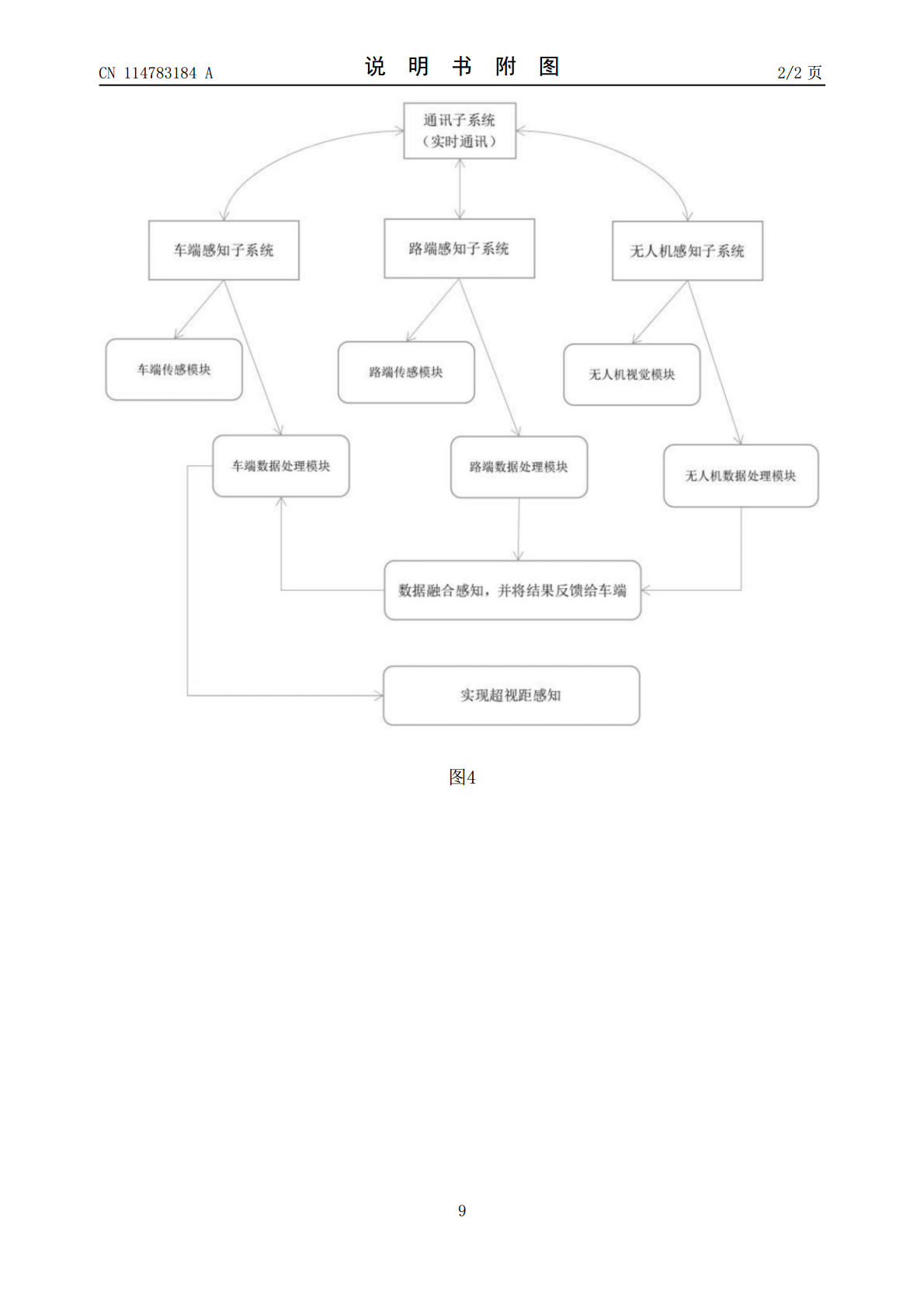
本发明涉及一种基于车、路、无人机信息融合的超视距感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;无人机子系统在保证安全的前提下在两个路端子系统中进行长时间短距离飞行主要用于获取两个路端盲区周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块、车端通讯模块以及无人机通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息、路端和无人机周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比
一种基于车路协同的超视距融合感知系统.pdf
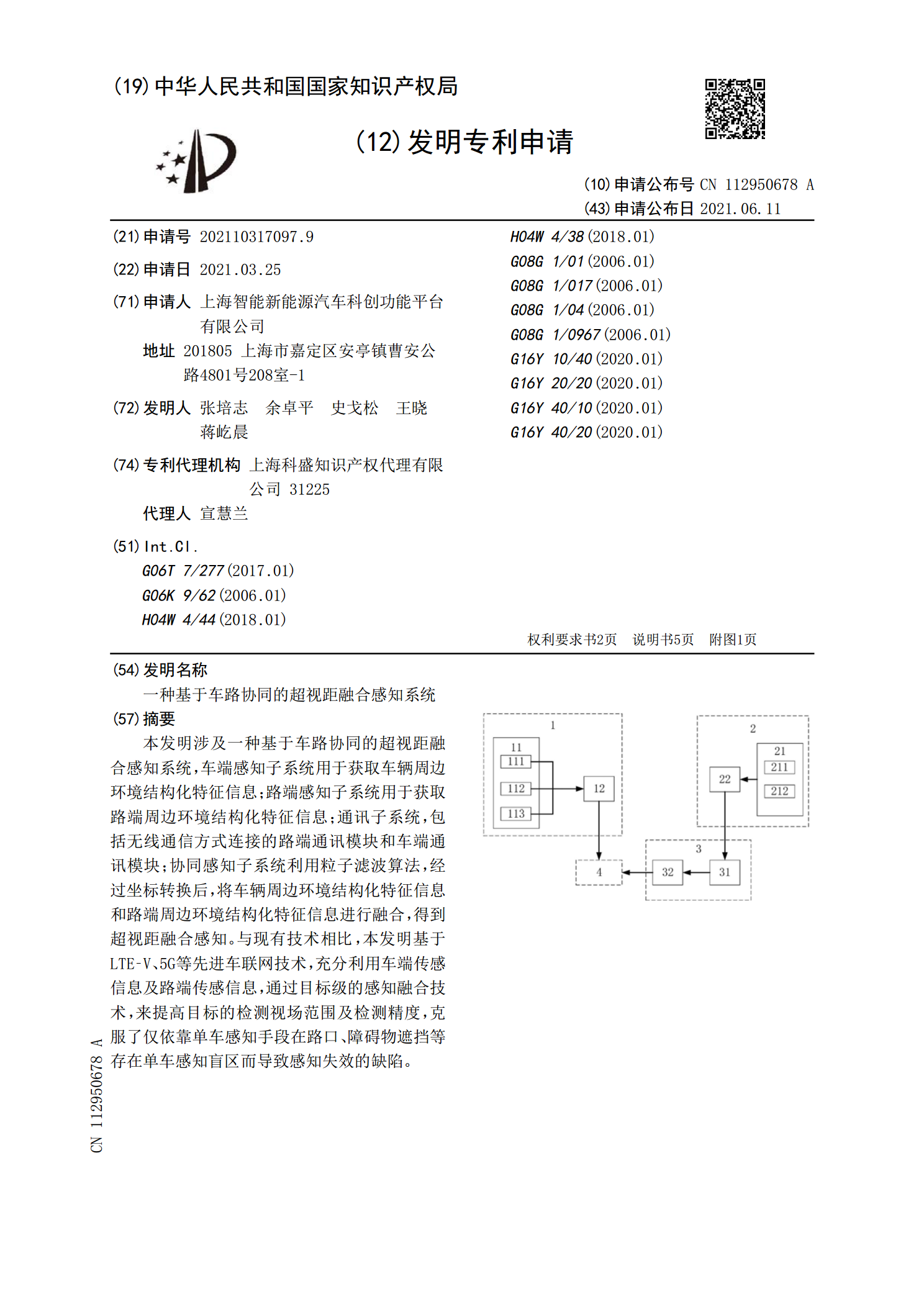
本发明涉及一种基于车路协同的超视距融合感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块和车端通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息和路端周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比,本发明基于LTE‑V、5G等先进车联网技术,充分利用车端传感信息及路端传感信息,通过目标级的感知融合技术,来提高目标的检测视场范围及检测精度,克服了仅
一种基于车路协同的路侧感知融合系统及优化方法.pdf
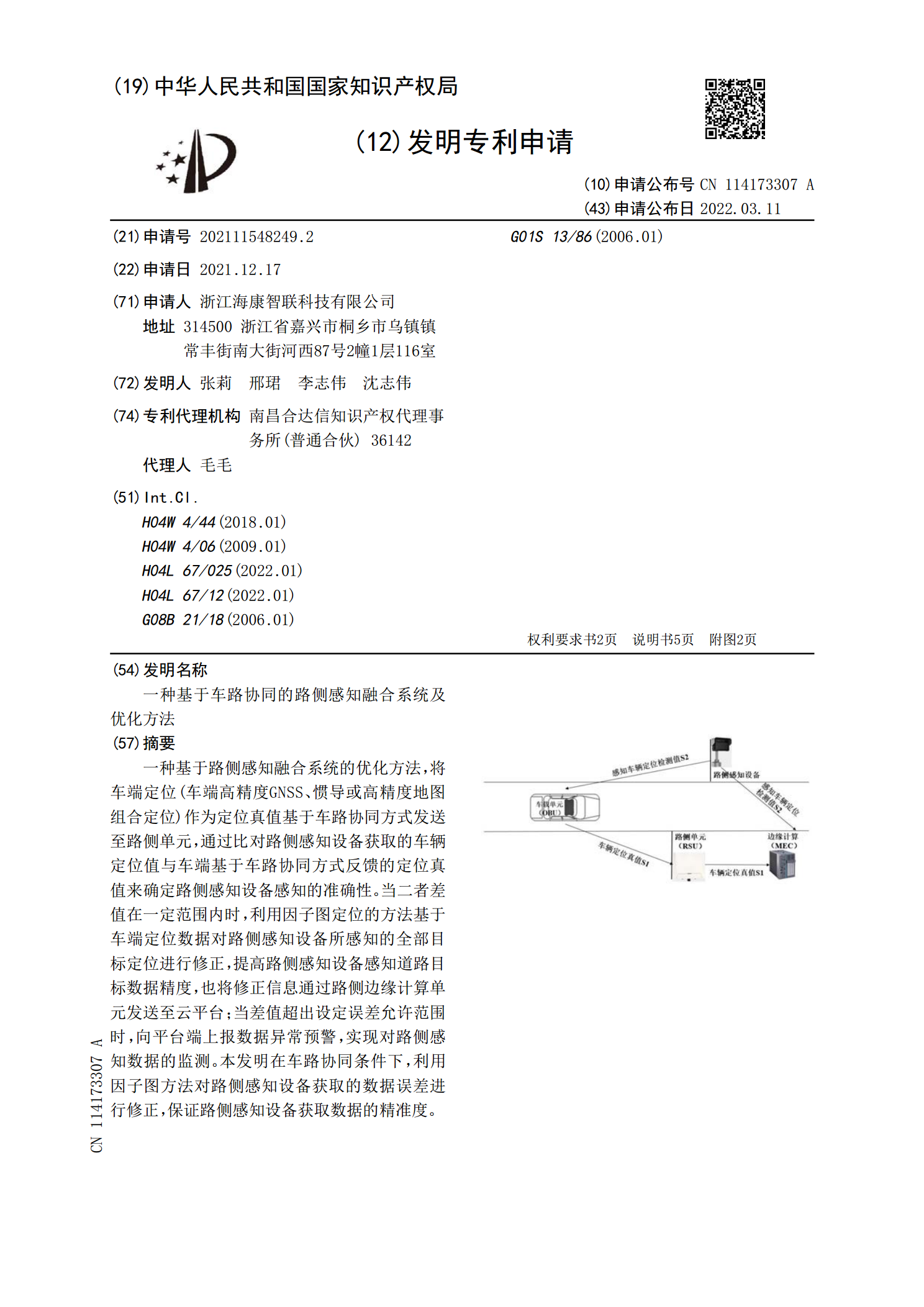
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

基于姿态同步的超视距无人机遥控系统.pdf
本发明目的是为了推广无人机的应用,针对无人机规范管理,提出了一种应用于无人机网络运行及操作管理的手段。该发明首先提出了网络传输控制的基本方法,即以无线网络或蜂窝系统建立替代传统点对点的遥控通道,由此可以大大延长无人机的操作距离。发明重点解决了将传统遥控指令转换为数据包的形式以通过网络进行传输。其次,发明将机载传感器采集的飞行姿态数据传送到地面控制台,以图形化显示出飞行高度、位置、速度、加速度、偏航角等信息,并以前庭感知,人在回路的方式再现飞行状态,使操作员身体直接感受到驾驶的效果。其方法有助于操控手准确把

一种路侧激光雷达超视距感知系统及其工作方法.pdf
本发明公开了一种路侧激光雷达超视距感知系统及其工作方法。系统包括:激光雷达、边缘低功耗计算平台、通信模块、电源模块和云端服务器。所述的边缘低功耗计算平台包括预处理模块,主干网络和多任务模块。当车辆、行人等目标物体进入路侧激光雷达超视距感知系统的感知范围时,路侧激光雷达超视距感知系统计算出路侧感知结果发送至云端服务器;云端服务器获取路侧感知结果后,一方面将其作为实时交通状态的来源数据;另一方面将路侧感知结果,分发给路侧激光雷达超视距感知系统覆盖范围内的车辆,使车辆获取路侧的感知结果,实现超视距感知。本发明可