
路侧感知系统.pdf

文库****坚白


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

路侧感知系统.pdf
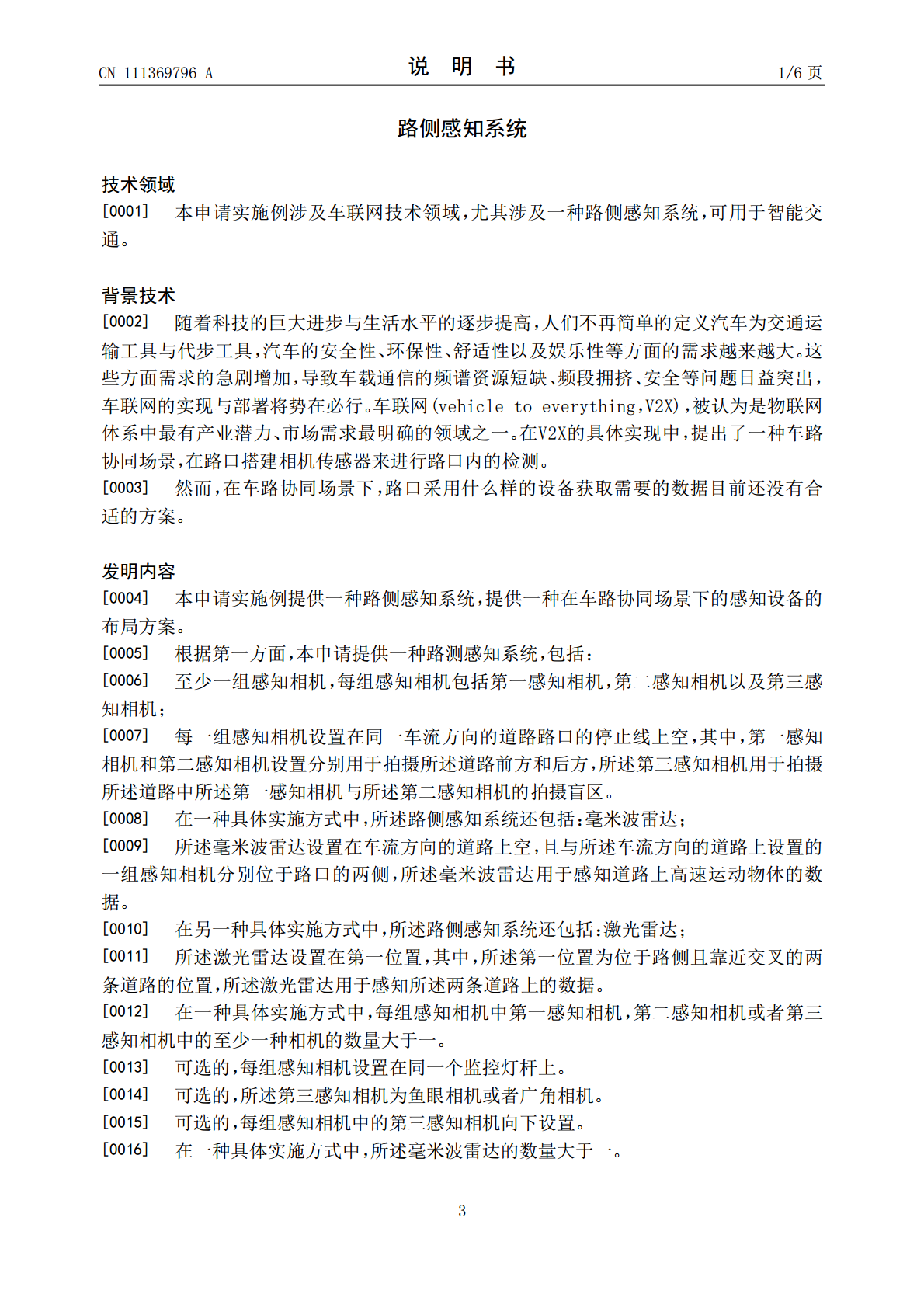
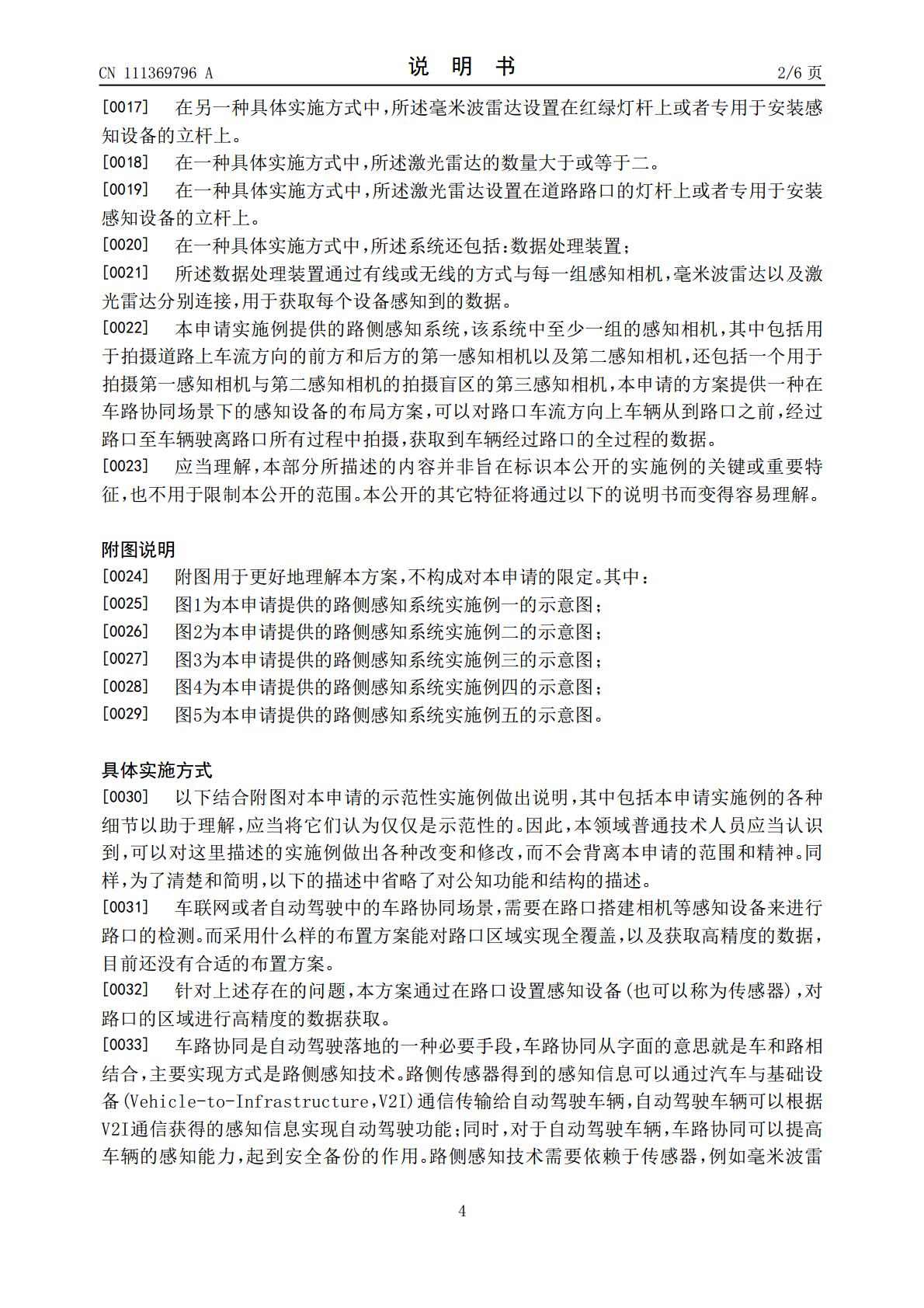
本申请公开了一种路侧感知系统,具体涉及车联网技术,可用于智能交通,包括:至少一组感知相机,每组感知相机包括第一感知相机,第二感知相机以及第三感知相机。每一组感知相机设置在同一车流方向的道路路口的停止线上空,其中,第一感知相机和第二感知相机设置分别用于拍摄所述道路前方和后方,所述第三感知相机用于拍摄所述道路中所述第一感知相机与所述第二感知相机的拍摄盲区。该系统提供一种车路协同场景下的在道路上感知设备的布置方案,可在车路协同场景下对路口经过的车辆以及其他物体进行数据的采集。
一种路侧感知系统.pdf
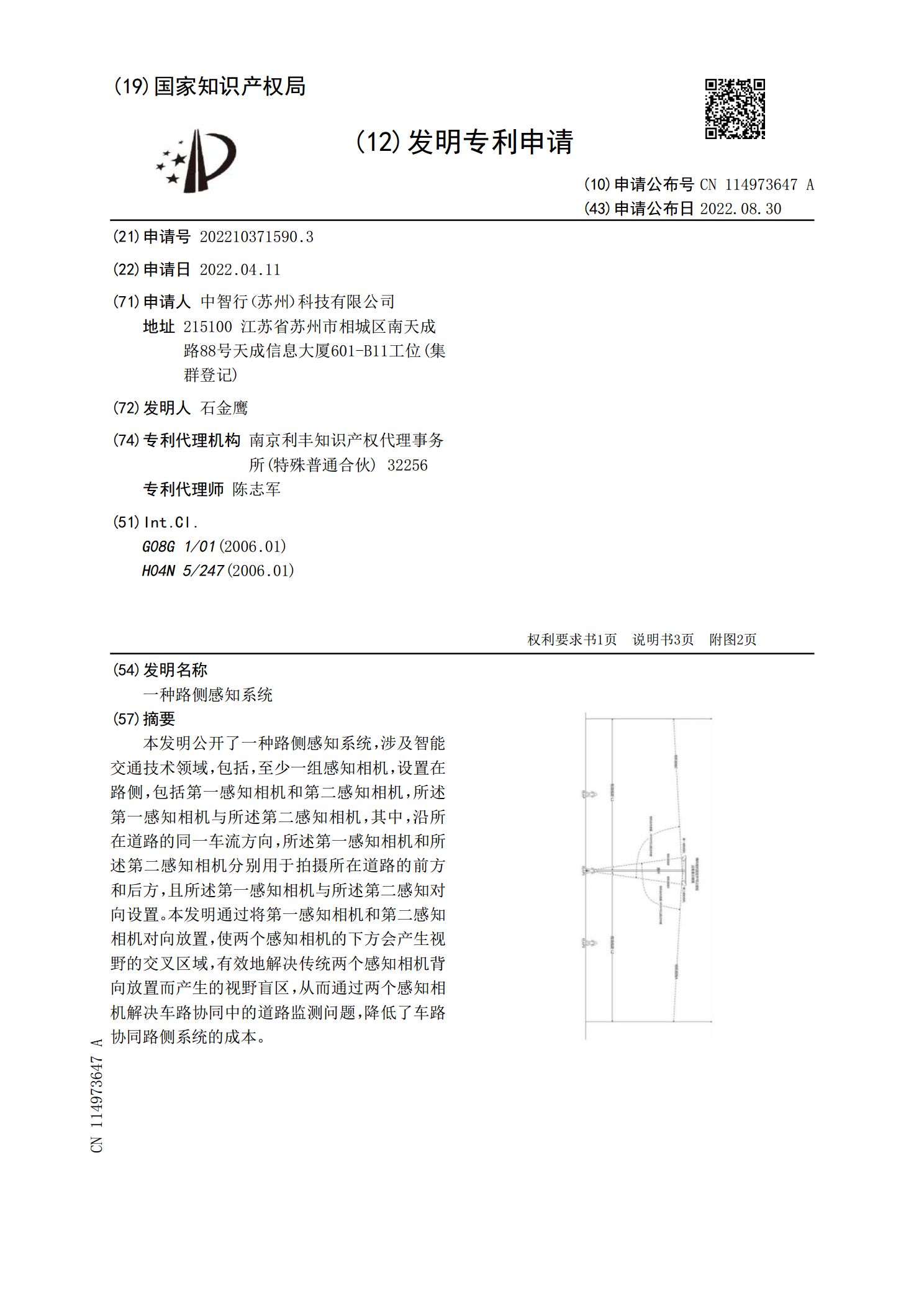
本发明公开了一种路侧感知系统,涉及智能交通技术领域,包括,至少一组感知相机,设置在路侧,包括第一感知相机和第二感知相机,所述第一感知相机与所述第二感知相机,其中,沿所在道路的同一车流方向,所述第一感知相机和所述第二感知相机分别用于拍摄所在道路的前方和后方,且所述第一感知相机与所述第二感知对向设置。本发明通过将第一感知相机和第二感知相机对向放置,使两个感知相机的下方会产生视野的交叉区域,有效地解决传统两个感知相机背向放置而产生的视野盲区,从而通过两个感知相机解决车路协同中的道路监测问题,降低了车路协同路侧系

车路协同系统路侧感知与车端感知实时匹配的方法及系统.pdf
本发明涉及一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端RSU;步骤3:路端RSU将路端感知融合数据转换为标准感知共享数据后进行广播;步骤4:车端OBU接收路端RSU广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,与现有技术相比,本发明具有能够实时
路侧感知系统和交通控制方法.pdf
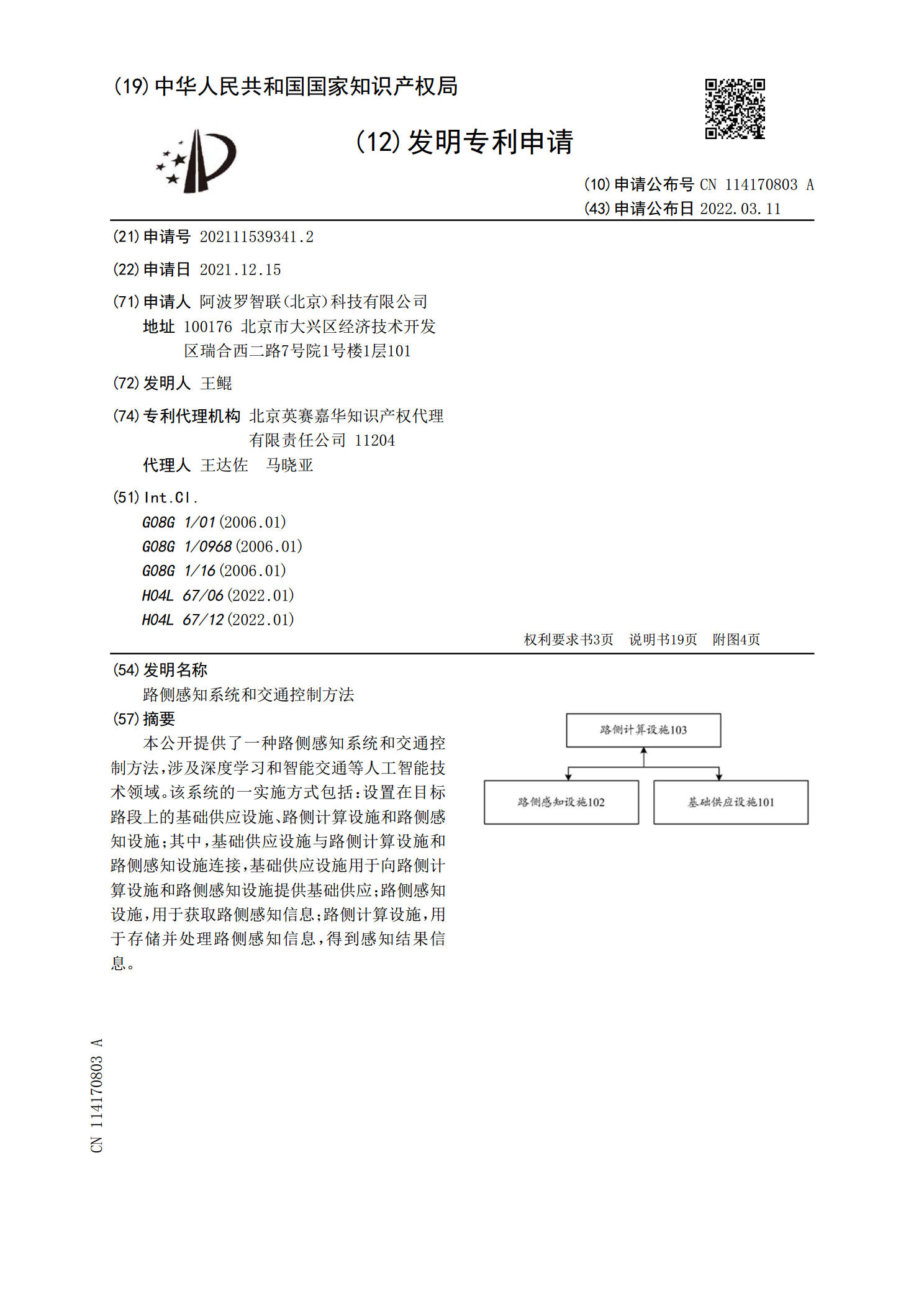
本公开提供了一种路侧感知系统和交通控制方法,涉及深度学习和智能交通等人工智能技术领域。该系统的一实施方式包括:设置在目标路段上的基础供应设施、路侧计算设施和路侧感知设施;其中,基础供应设施与路侧计算设施和路侧感知设施连接,基础供应设施用于向路侧计算设施和路侧感知设施提供基础供应;路侧感知设施,用于获取路侧感知信息;路侧计算设施,用于存储并处理路侧感知信息,得到感知结果信息。
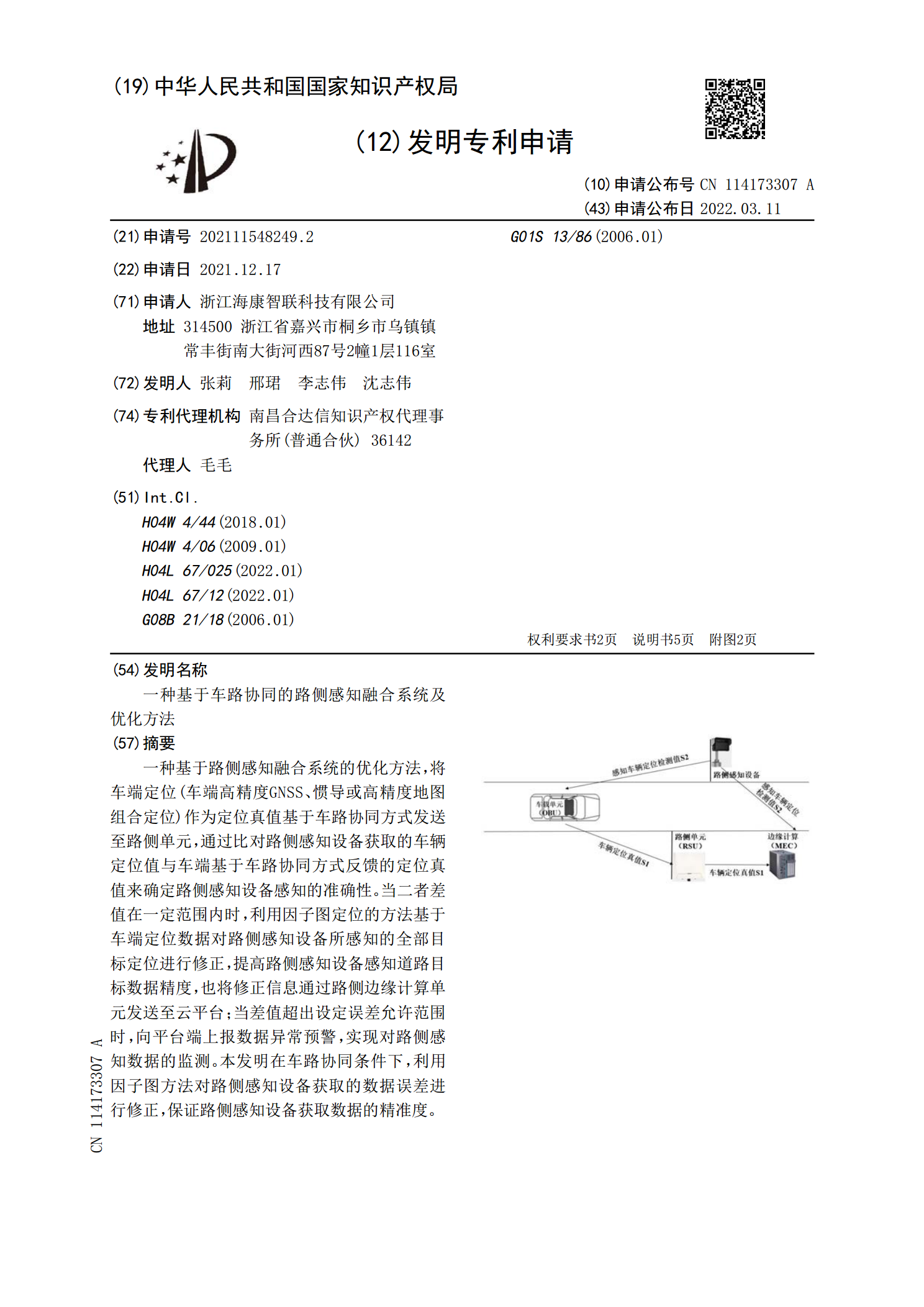
一种基于车路协同的路侧感知融合系统及优化方法.pdf
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监