
一种磁浮列车的监测方法、系统及存储介质.pdf

a是****澜吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁浮列车的监测方法、系统及存储介质.pdf
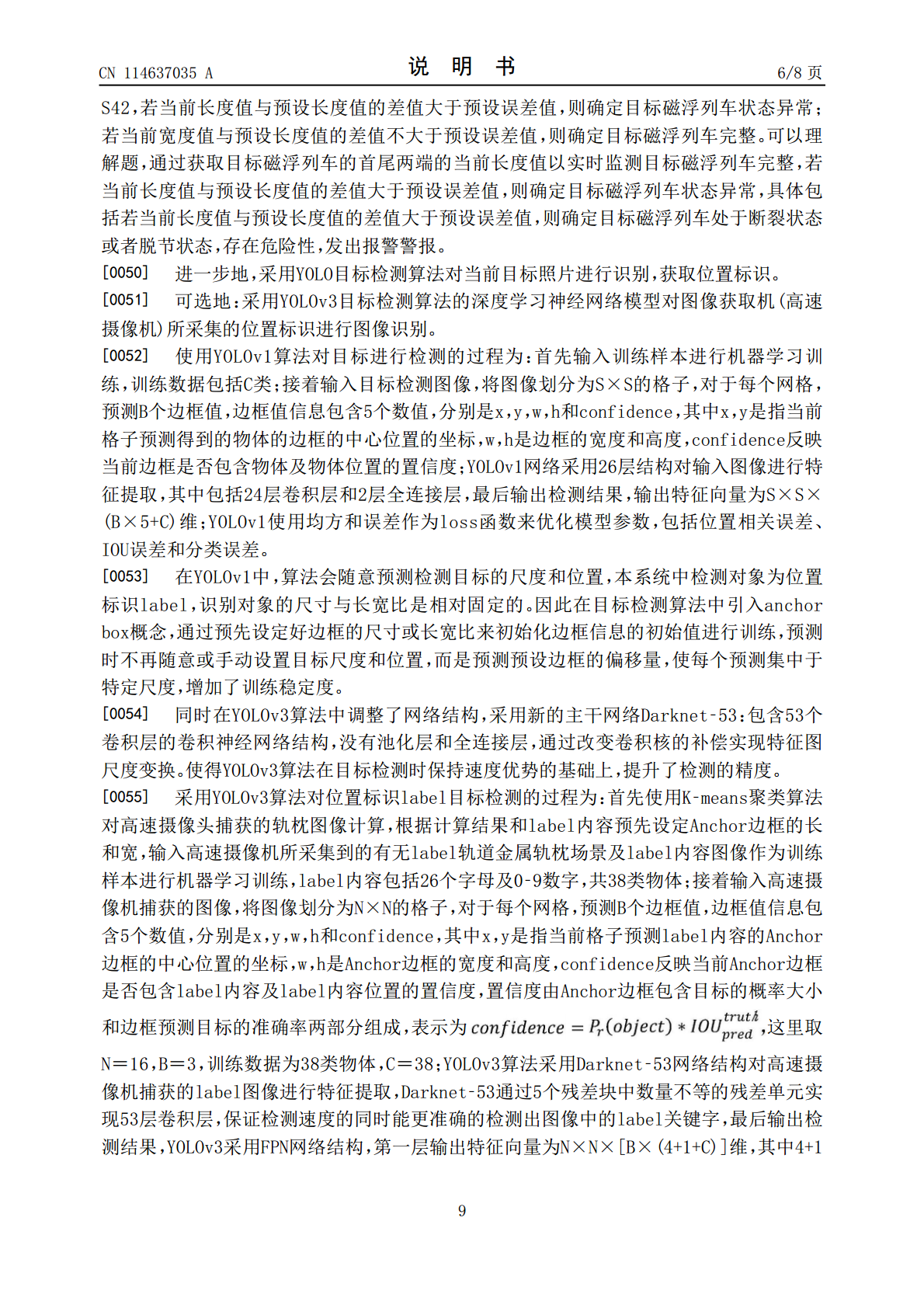
本发明公开了一种磁浮列车的监测方法、系统及存储介质,包括判断卫星接收机的监测状态信息;若卫星接收机处于全监测状态则进入步骤S31;若卫星接收机处于盲监测状态则进入步骤S32;若卫星接收机处于半监测状态则进入步骤S33:S31,根据卫星定位信息获取目标磁浮列车的当前状态信息;S32,根据目标标识位置信息获取目标磁浮列车的当前状态信息;S33,根据卫星定位信息、轨道电子地图三维信息以及目标标识位置信息获取目标磁浮列车的当前状态信息;其中,目标磁浮列车的当前状态信息包括目标磁浮列车的当前位置信息。本发明的磁浮列
磁浮列车的整车振动测试方法、系统、设备及存储介质.pdf
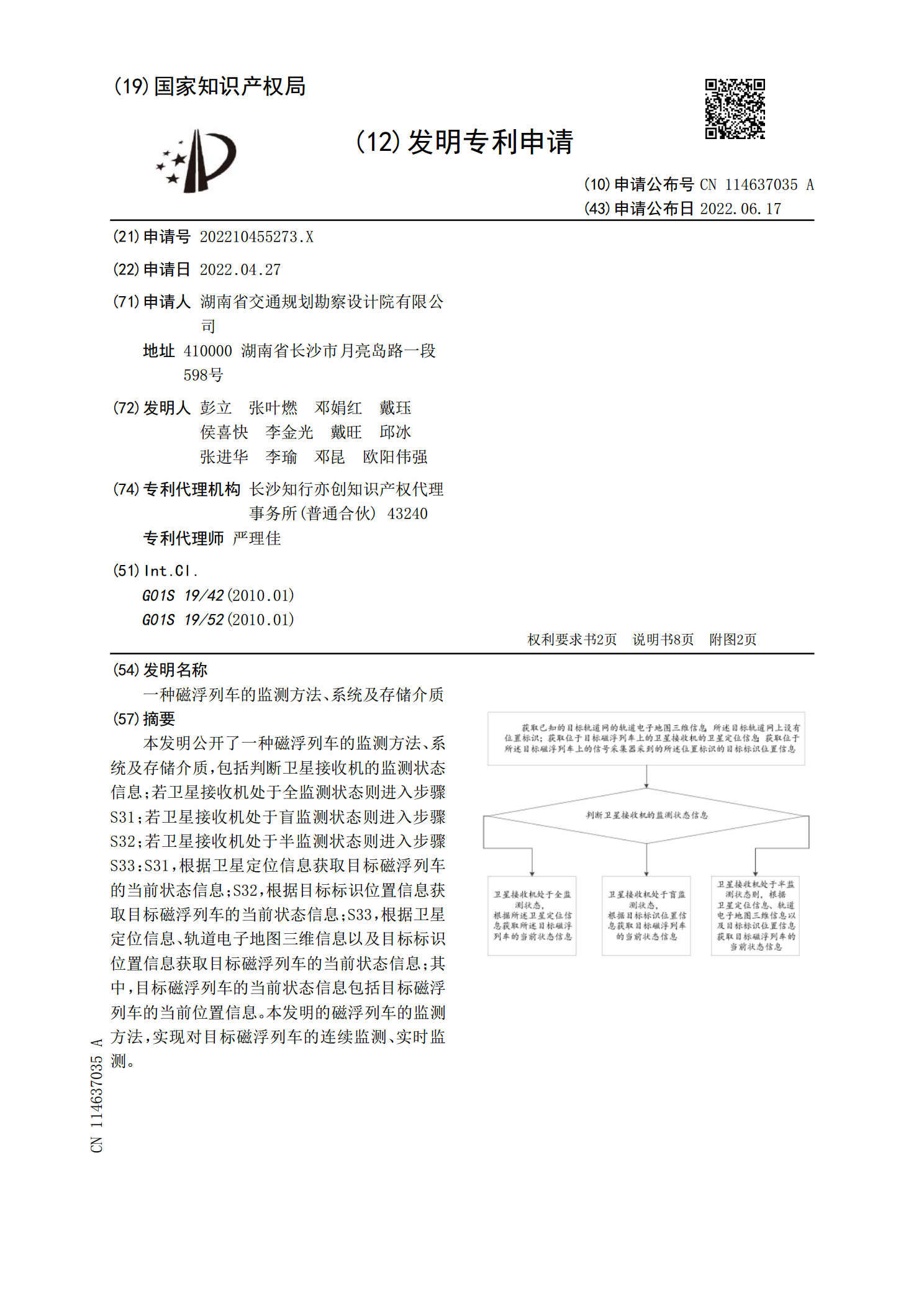
本申请公开了一种磁浮列车的整车振动测试方法,应用于轨道交通技术领域,包括:将磁浮列车模型的外形进行切分,得到切分出的多个外形组分;确定出磁浮列车的运行工况,并基于运行工况得到各个外形组分的气动力特性;针对任意1个外形组分的气动力特性,通过将外形组分视为梁单元,将外形组分的表面分布力转换为集中力;基于各个外形组分的集中力,转换为各个作动器位置的集中力;基于确定出的各个作动器位置的集中力,进行各个作动器的运动控制,以进行磁浮列车的整车振动测试。应用本申请的方案,可以有效地提高磁浮列车的整车振动测试的准确性。本
高速磁浮列车运行节能优化方法、系统及存储介质.pdf
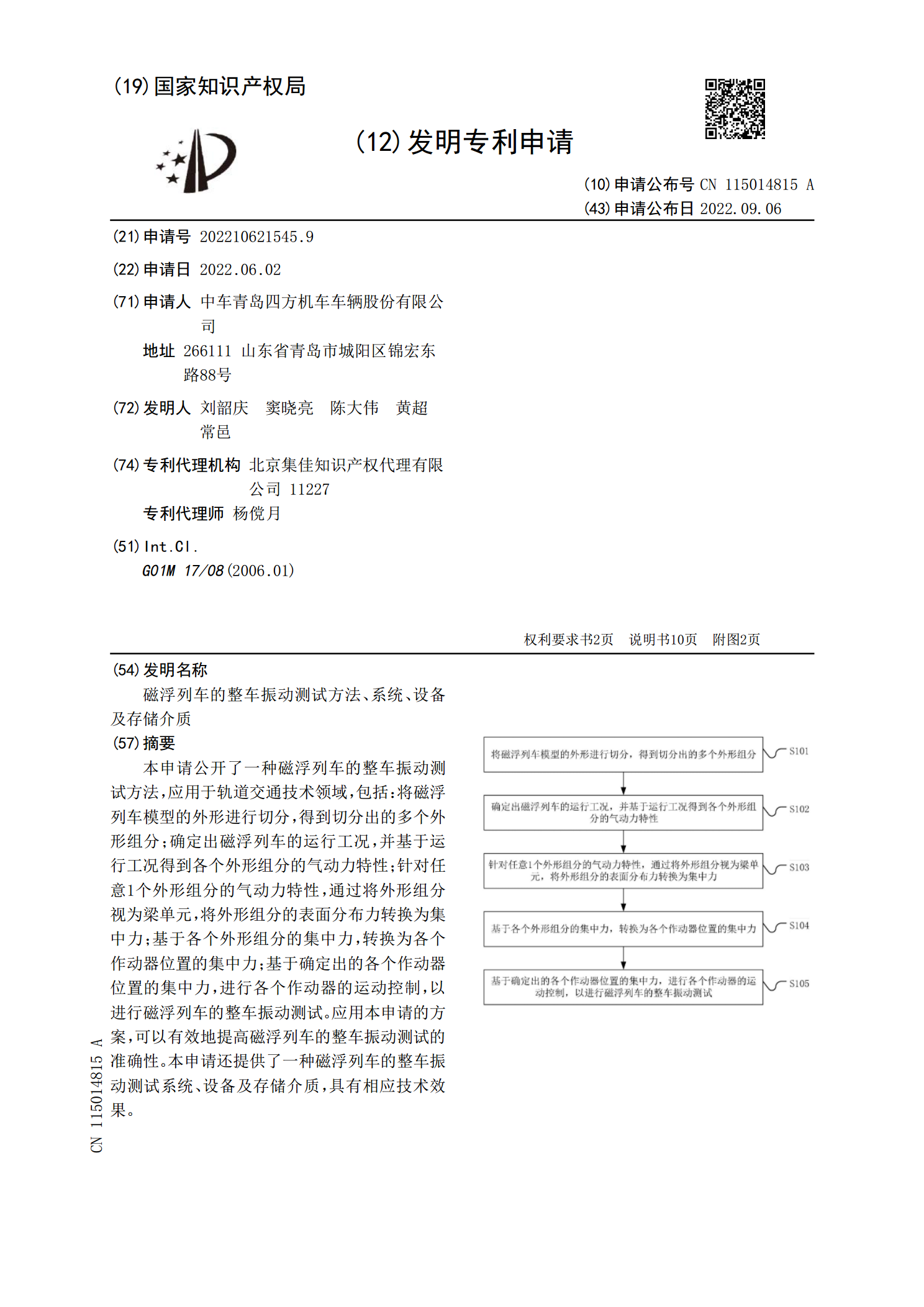
本发明公开了一种高速磁浮列车运行节能优化方法、系统及存储介质,首先根据高速磁浮列车运行过程设计列车牵引计算模型,构造能耗、时间、停车点、平稳性四项节能性能指标量化函数,建立列车运行曲线多目标优化模型,然后采用萤火虫算法对列车节能优化问题进行求解。本方法能够依据区间内线路坡度、速度限制、列车牵引特性、制动特性等信息,快速搜索出不同计划运行时间条件下的节能运行曲线,同时满足高速磁浮列车行驶的节能性、准时性、安全性和平稳性要求,按照本方法搜索出的运行曲线指导列车运行可以有效降低列车能耗。
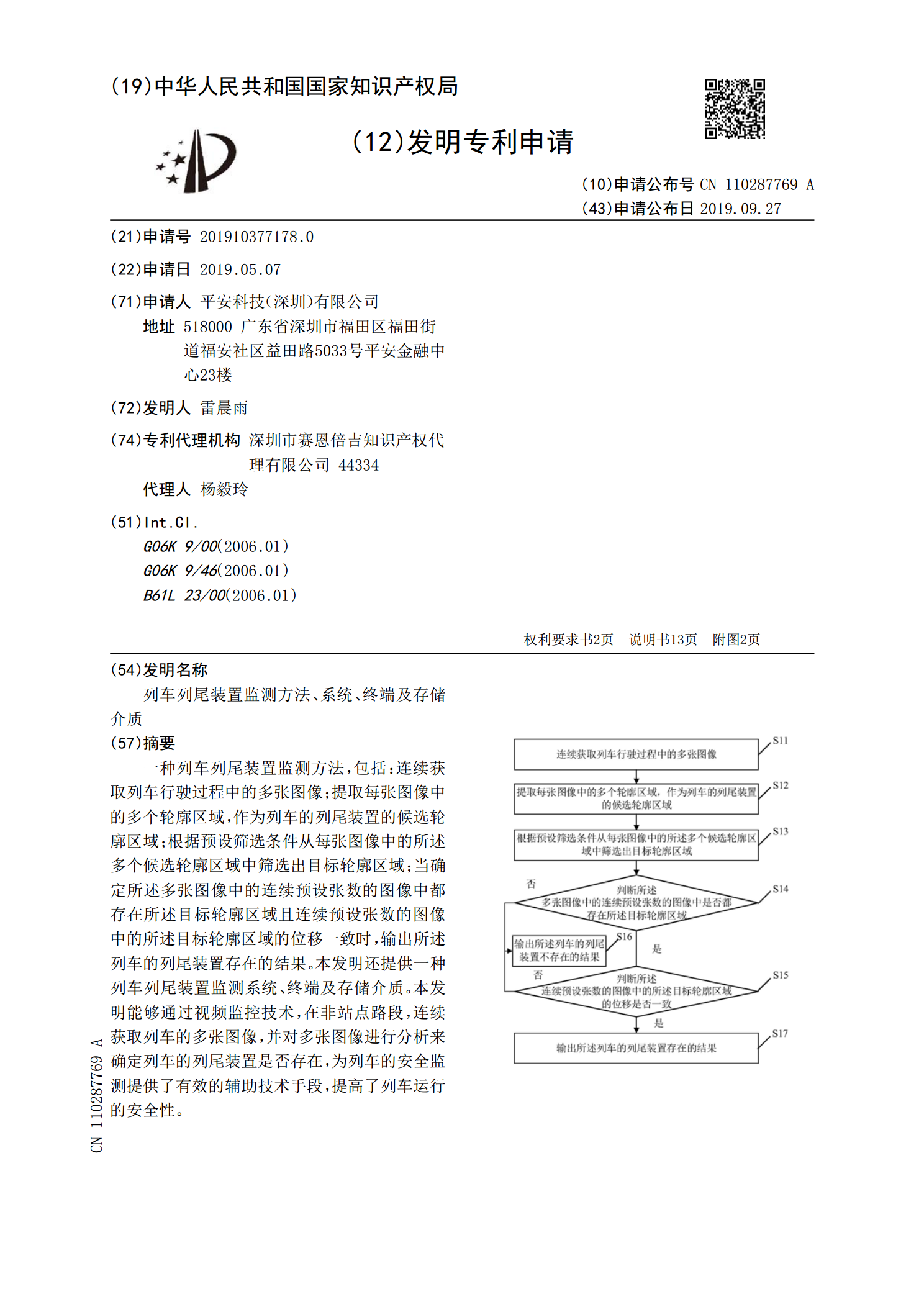
列车列尾装置监测方法、系统、终端及存储介质.pdf
一种列车列尾装置监测方法,包括:连续获取列车行驶过程中的多张图像;提取每张图像中的多个轮廓区域,作为列车的列尾装置的候选轮廓区域;根据预设筛选条件从每张图像中的所述多个候选轮廓区域中筛选出目标轮廓区域;当确定所述多张图像中的连续预设张数的图像中都存在所述目标轮廓区域且连续预设张数的图像中的所述目标轮廓区域的位移一致时,输出所述列车的列尾装置存在的结果。本发明还提供一种列车列尾装置监测系统、终端及存储介质。本发明能够通过视频监控技术,在非站点路段,连续获取列车的多张图像,并对多张图像进行分析来确定列车的列尾
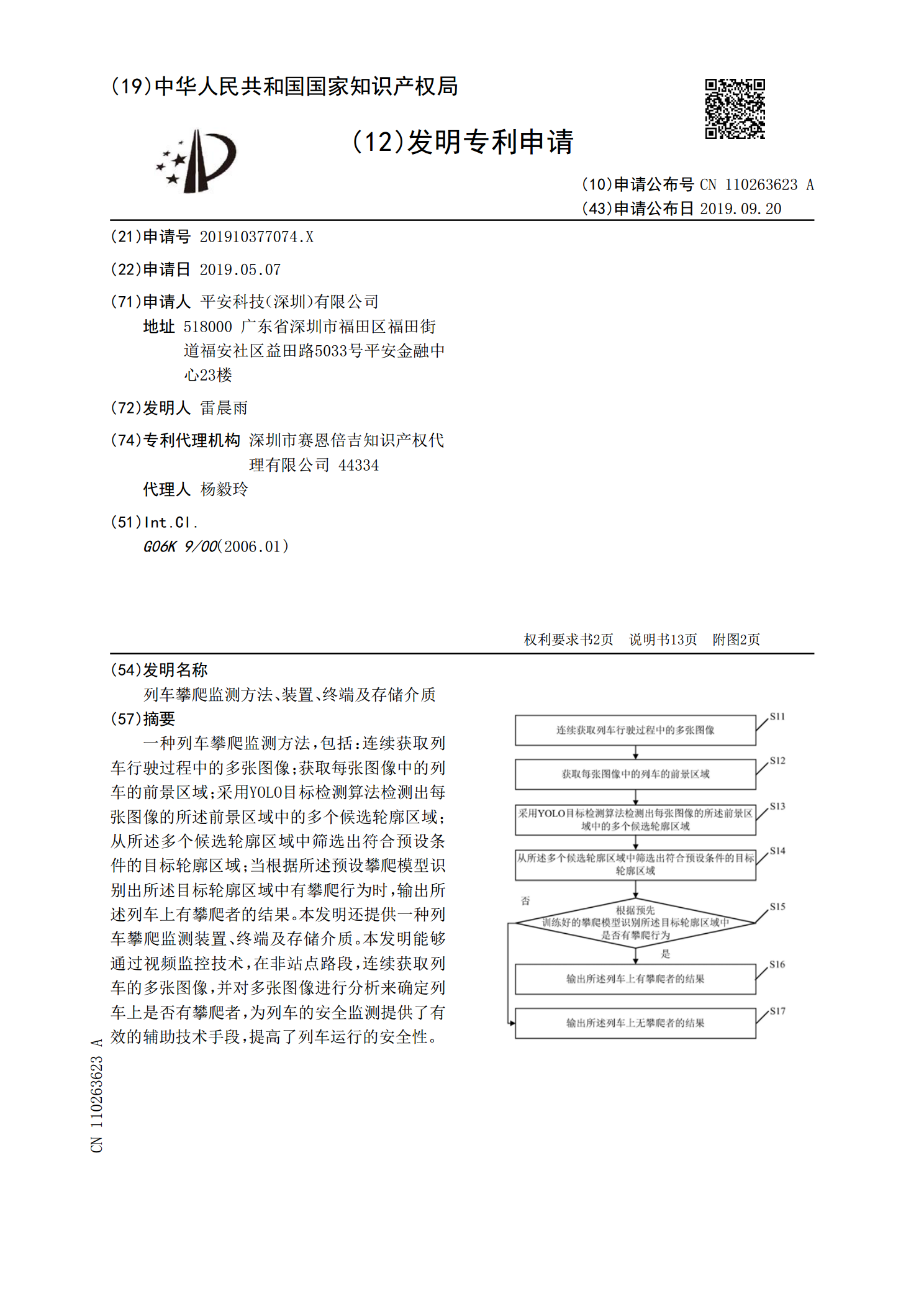
列车攀爬监测方法、装置、终端及存储介质.pdf
一种列车攀爬监测方法,包括:连续获取列车行驶过程中的多张图像;获取每张图像中的列车的前景区域;采用YOLO目标检测算法检测出每张图像的所述前景区域中的多个候选轮廓区域;从所述多个候选轮廓区域中筛选出符合预设条件的目标轮廓区域;当根据所述预设攀爬模型识别出所述目标轮廓区域中有攀爬行为时,输出所述列车上有攀爬者的结果。本发明还提供一种列车攀爬监测装置、终端及存储介质。本发明能够通过视频监控技术,在非站点路段,连续获取列车的多张图像,并对多张图像进行分析来确定列车上是否有攀爬者,为列车的安全监测提供了有效的辅助