
车辆及其后视镜的智能调节系统和方法.pdf

春兰****89

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆及其后视镜的智能调节系统和方法.pdf
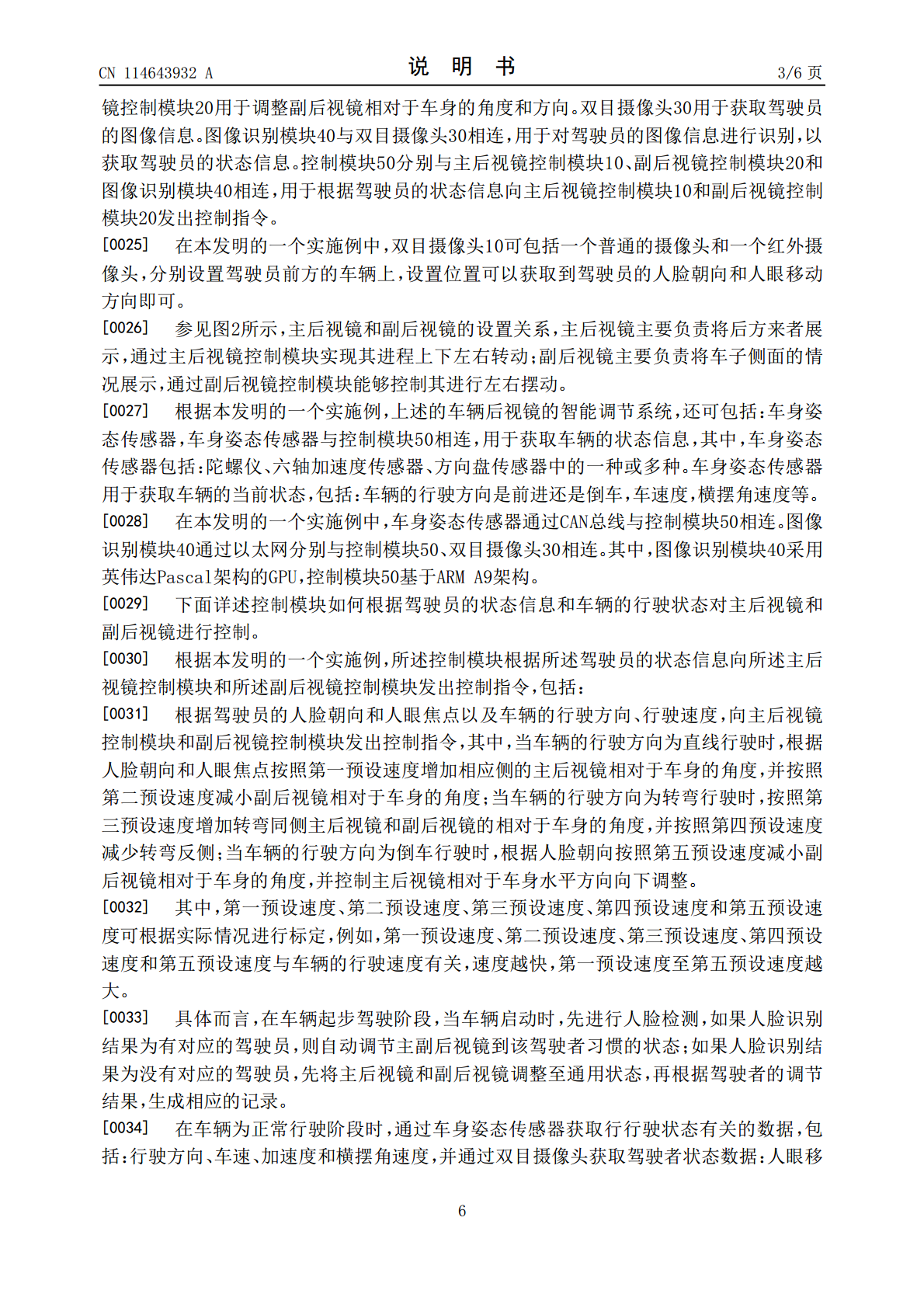
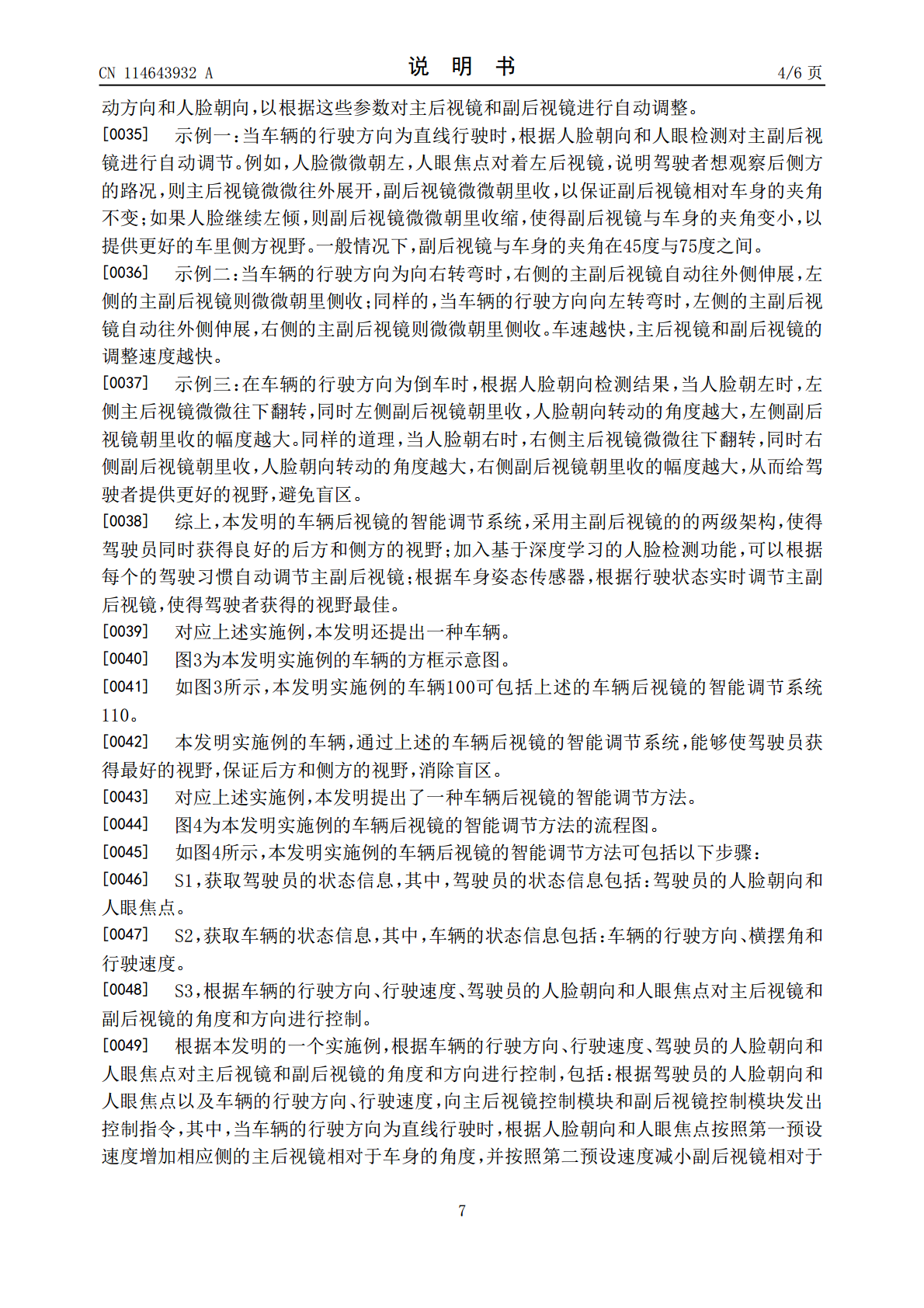
本发明提供一种车辆及其后视镜的智能调节系统和方法,系统包括:主后视镜控制模块,用于调整主后视镜相对于车身的角度和方向;副后视镜控制模块,用于调整副后视镜相对于车身的角度和方向;双目摄像头,用于获取驾驶员的图像信息;图像识别模块,图像识别模块与双目摄像头相连,用于对驾驶员的图像信息进行识别,以获取驾驶员的状态信息;控制模块,控制模块分别与主后视镜控制模块、副后视镜控制模块和图像识别模块相连,用于根据驾驶员的状态信息向主后视镜控制模块和副后视镜控制模块发出控制指令。本发明的系统,通过根据驾驶员的状态信息对车辆
车辆后视镜调节控制系统和方法.pdf
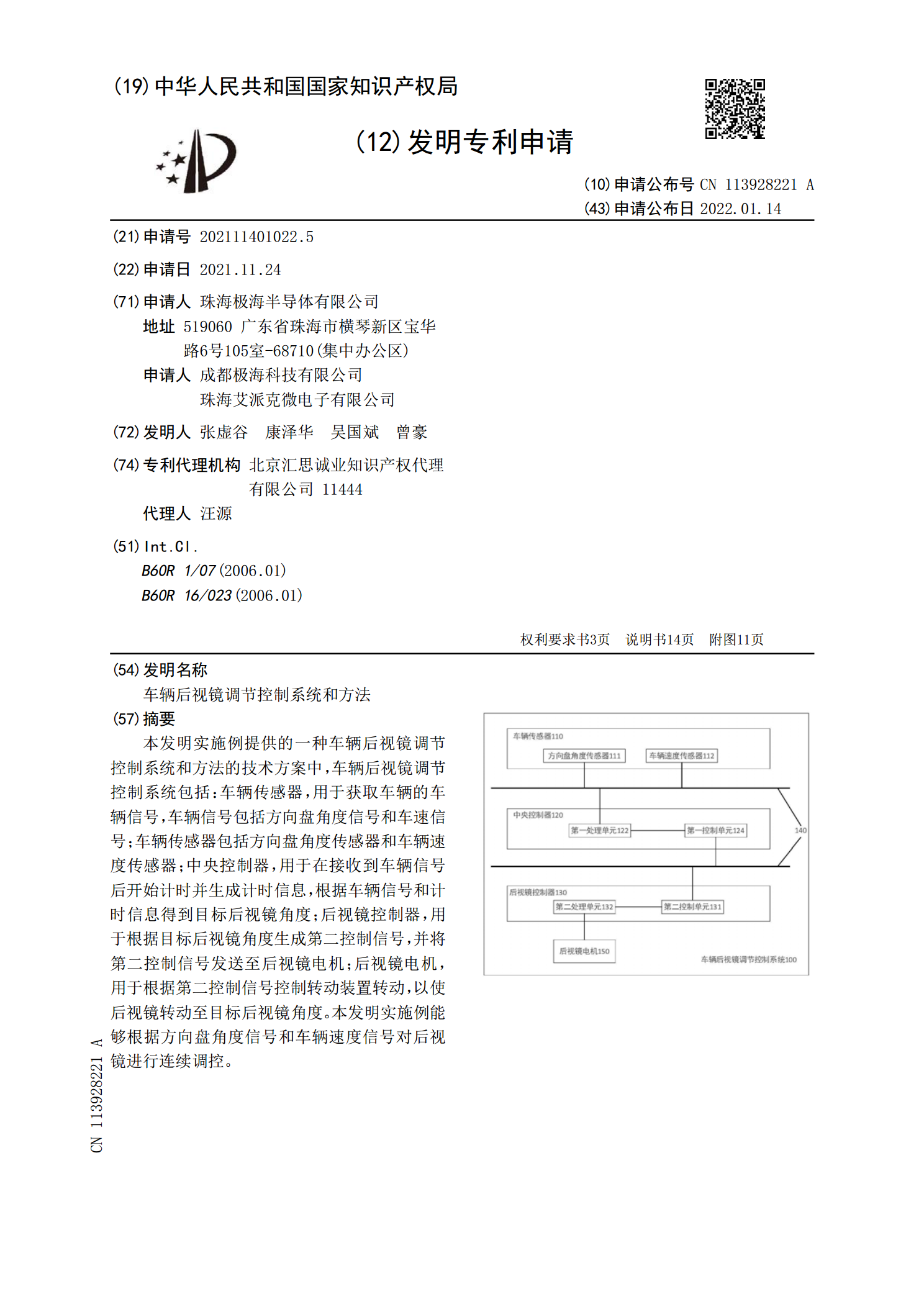
本发明实施例提供的一种车辆后视镜调节控制系统和方法的技术方案中,车辆后视镜调节控制系统包括:车辆传感器,用于获取车辆的车辆信号,车辆信号包括方向盘角度信号和车速信号;车辆传感器包括方向盘角度传感器和车辆速度传感器;中央控制器,用于在接收到车辆信号后开始计时并生成计时信息,根据车辆信号和计时信息得到目标后视镜角度;后视镜控制器,用于根据目标后视镜角度生成第二控制信号,并将第二控制信号发送至后视镜电机;后视镜电机,用于根据第二控制信号控制转动装置转动,以使后视镜转动至目标后视镜角度。本发明实施例能够根据方向盘

车辆的后视镜角度调节系统及调节方法.pdf
本发明的车辆的后视镜角度调节系统包括驾驶员意图判断系统、双侧单目摄像头系统、后视镜角度控制ECU及后视镜角度调节器。驾驶员意图判断系统判断车辆是否即将驶入或驶出交通主干道。双侧单目摄像头系统捕捉自车斜后方的其他车辆的图像,并根据图像计算其他车辆相对于自车车身的角度。后视镜角度控制ECU在驾驶员意图判断系统判断为车辆即将驶入或驶出交通主干道的情况下,以从双侧单目摄像头系统获取的其他车辆相对于自车车身的角度,控制后视镜角度调节器。后视镜角度调节器调节左侧和/或右侧的外后视镜的角度。

汽车侧后视镜智能调节控制系统及其控制方法.pdf
本发明涉及一种汽车侧后视镜智能调节控制系统及其控制方法。汽车侧后视镜智能调节控制系统包括中央处理单元及与中央处理单元相连的车内摄像头、汽车称重传感器、方向盘转角传感器、倒车档位传感器和第一驱动电路、第二驱动电路,第一驱动电路和汽车侧后视镜的上下电机相连,第二驱动电路和汽车侧后视镜的左右电机相连,车内摄像头安装在驾驶员座椅的前方或斜前方。控制方法为,根据驾驶员眼睛空间位置变化及汽车行驶状态变化自动对汽车侧后视镜角度进行及时调整,使侧后视镜调节到最佳角度,消除盲区和死角,使驾驶员一直保持有最佳驾驶视野,提高汽
后视镜智能调节系统.pdf
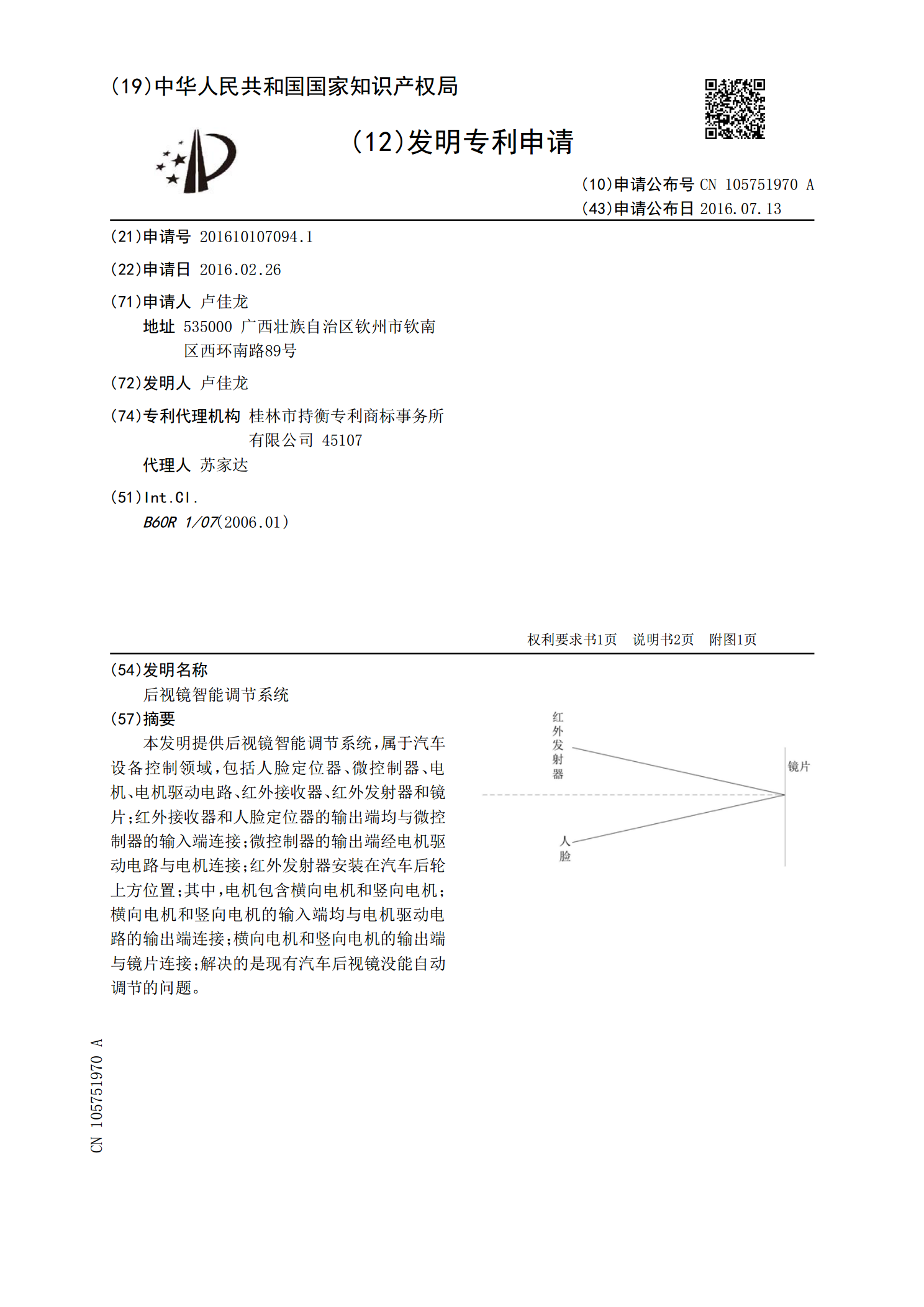
本发明提供后视镜智能调节系统,属于汽车设备控制领域,包括人脸定位器、微控制器、电机、电机驱动电路、红外接收器、红外发射器和镜片;红外接收器和人脸定位器的输出端均与微控制器的输入端连接;微控制器的输出端经电机驱动电路与电机连接;红外发射器安装在汽车后轮上方位置;其中,电机包含横向电机和竖向电机;横向电机和竖向电机的输入端均与电机驱动电路的输出端连接;横向电机和竖向电机的输出端与镜片连接;解决的是现有汽车后视镜没能自动调节的问题。