
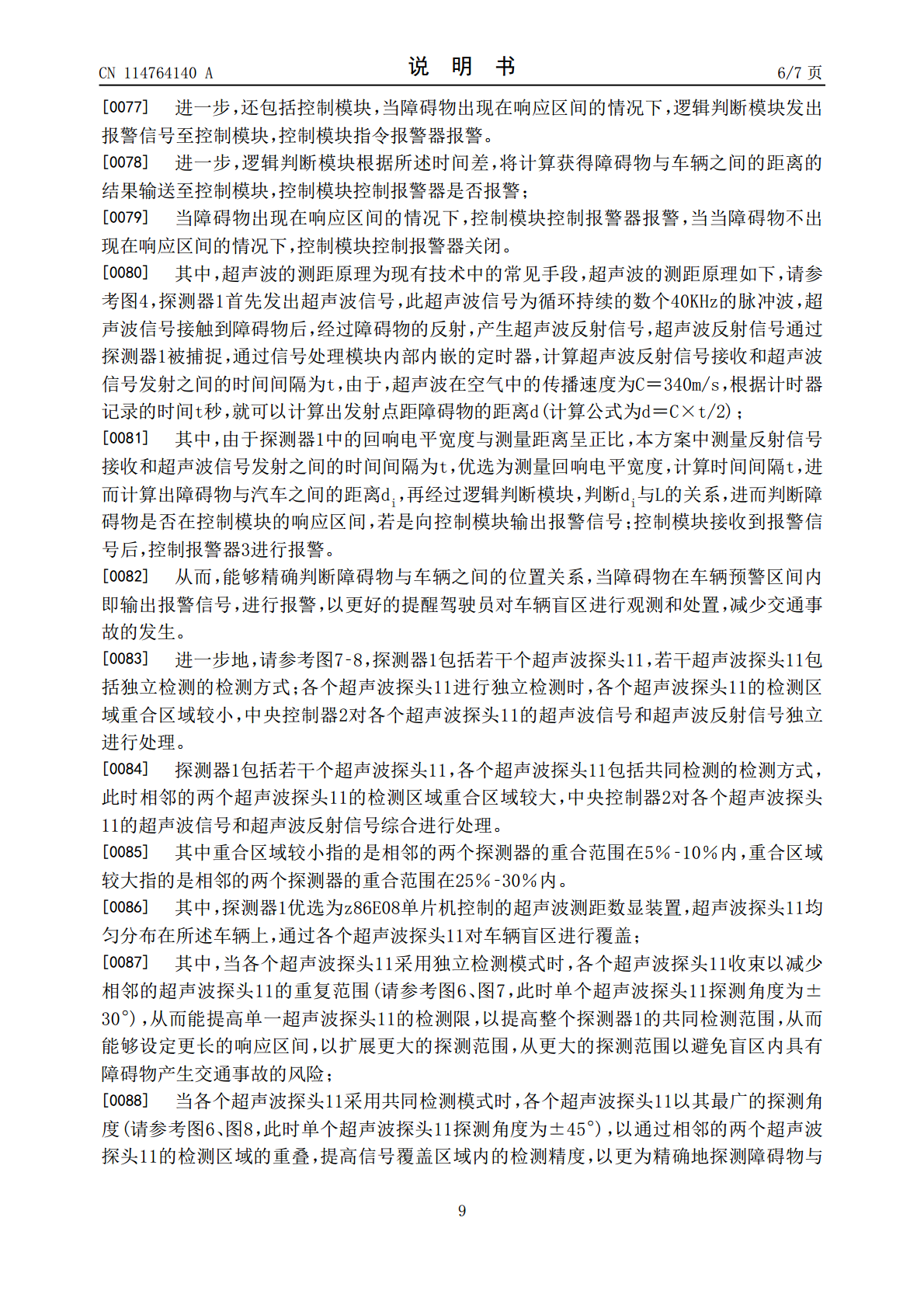
一种基于超声波测距的下车盲区检测预警方法及装置.pdf

是飞****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于超声波测距的下车盲区检测预警方法及装置.pdf
本发明涉及预警检测技术领域,公开了一种基于超声波测距的下车盲区检测预警方法及装置,包括:探测器、中央控制器和报警器;探测器在汽车车速为零时,启动探测;探测器发出超声波信号,并捕捉超声波反射信号;中央控制器判断障碍物是否在响应区间,若在,报警器进行报警。本发明通过逻辑判断,精确判断障碍物与车辆之间的位置关系,当障碍物在车辆预警区间内即输出报警信号,并且在障碍物进行移动过程中,根据障碍物与车辆之间的移动关系,输出不同持续时长的报警信号,以对障碍物的移动关系作警示,更好的区分障碍物即将对车辆产生的影响,以更好的
一种无盲区超声波测距探头及测距方法.pdf
本发明公开了一种无盲区超声波测距探头及测距方法,该探头包括处于同一平面上的超声波发射器T、第一超声波接收器R
盲区预警装置的检测方法.pdf
本发明公开了一种盲区预警装置的检测方法,包括:通过盲区图像采集装置采集待测车辆盲区的图像,并显示在显示屏中,所述显示屏上有盲区线,当助测车辆的图像显示为正在越过盲区线时,即表示助测车辆进入待测车辆的盲区;将待测车辆的盲区预警装置的预警时间与图像上助测车辆进入待测车辆盲区的时间比较,判断盲区预警装置预警的准确性。本发明测试方法简单、结果准确,且节省人力。

一种无盲区超声波测距方法.pdf
本发明公开了一种无盲区超声波测距方法,步骤为:1)收发一体超声波探头发送超声波信号。2)放大并采集盲区时间以外的两次反射回波信号。3)计算超声波完成反射的时间t。4)计算声速c。5)计算收发一体超声波探头和待检测目标之间的距离I。本发明采用互相关的原理计算超声波信号完成一次反射的时间,可以解决近距离测距盲区问题,实现收发一体探头无盲区测距。
一种基于车辆盲区的监控预警装置及方法.pdf
本发明提供一种基于车辆盲区的监控预警装置,包括ECU、测量单元、GPS定位单元、雷达、摄像头、障碍物图像识别单元、通信单元和报警单元;测量单元和GPS定位单元分别获取车辆的运动信息及位置信息;雷达接收ECU的探测指令对障碍物探测,在有障碍物时测量车辆与障碍物间的相对距离;摄像头接收ECU的拍摄指令对障碍物拍摄;障碍物图像识别单元识别当前障碍物类型;ECU接收云服务器生成的指定盲区范围后,下发探测指令及拍摄指令,并基于当前障碍物类型及车辆与障碍物间的相对距离,对车辆碰撞风险进行检测,且在有碰撞风险时生成报警