
后视镜参数优化方法、系统、可读存储介质及计算机设备.pdf

An****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
后视镜参数优化方法、系统、可读存储介质及计算机设备.pdf
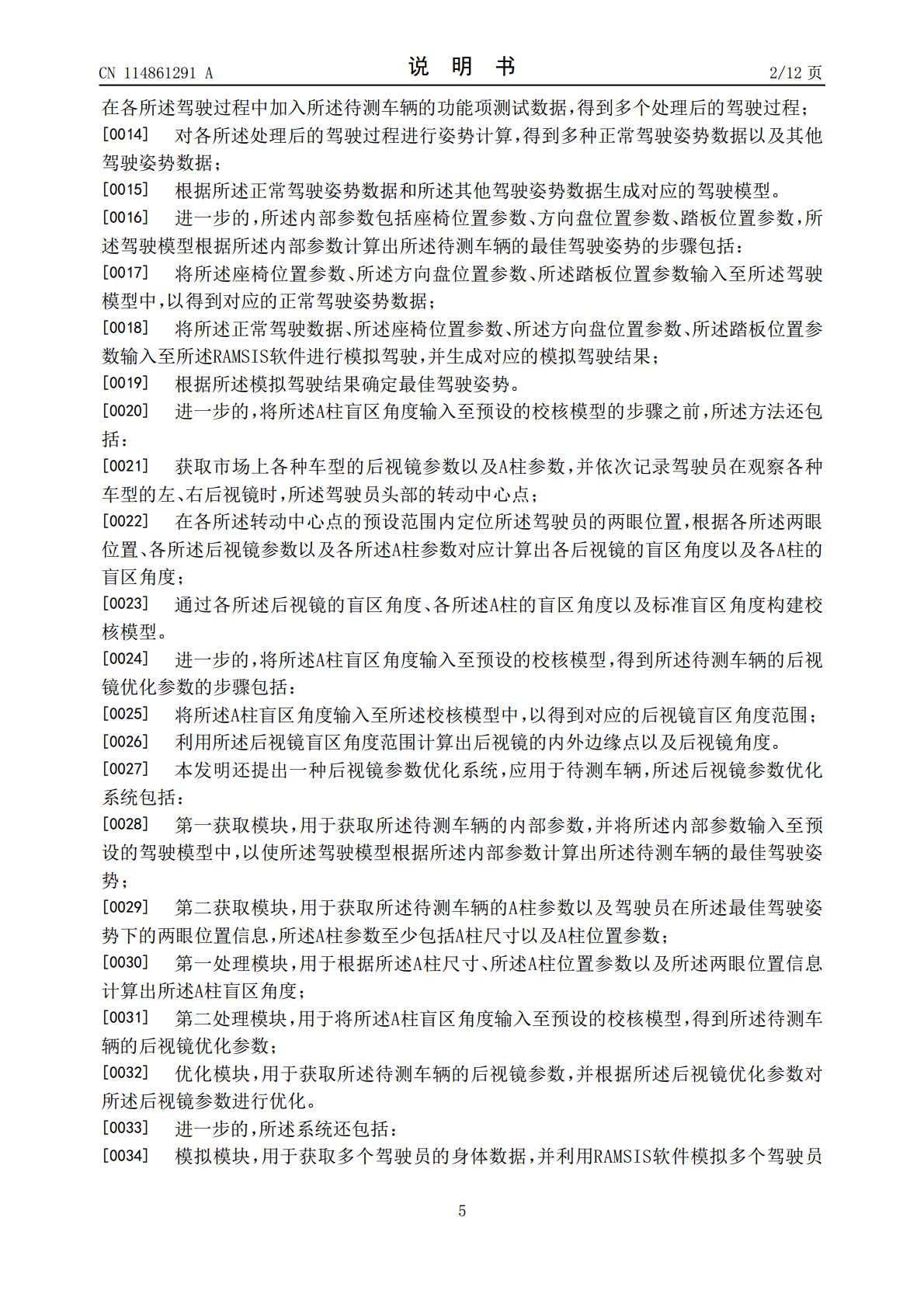
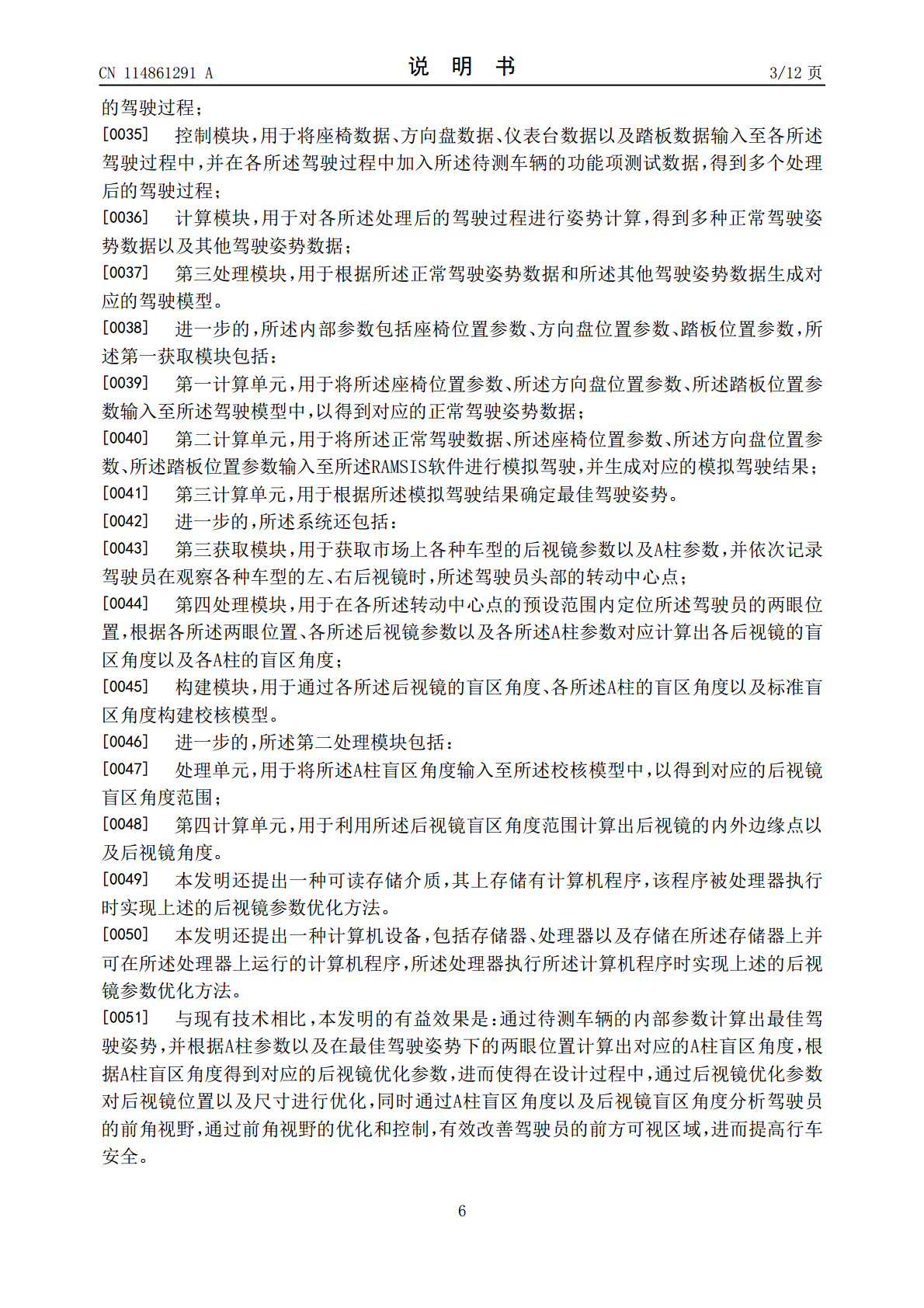
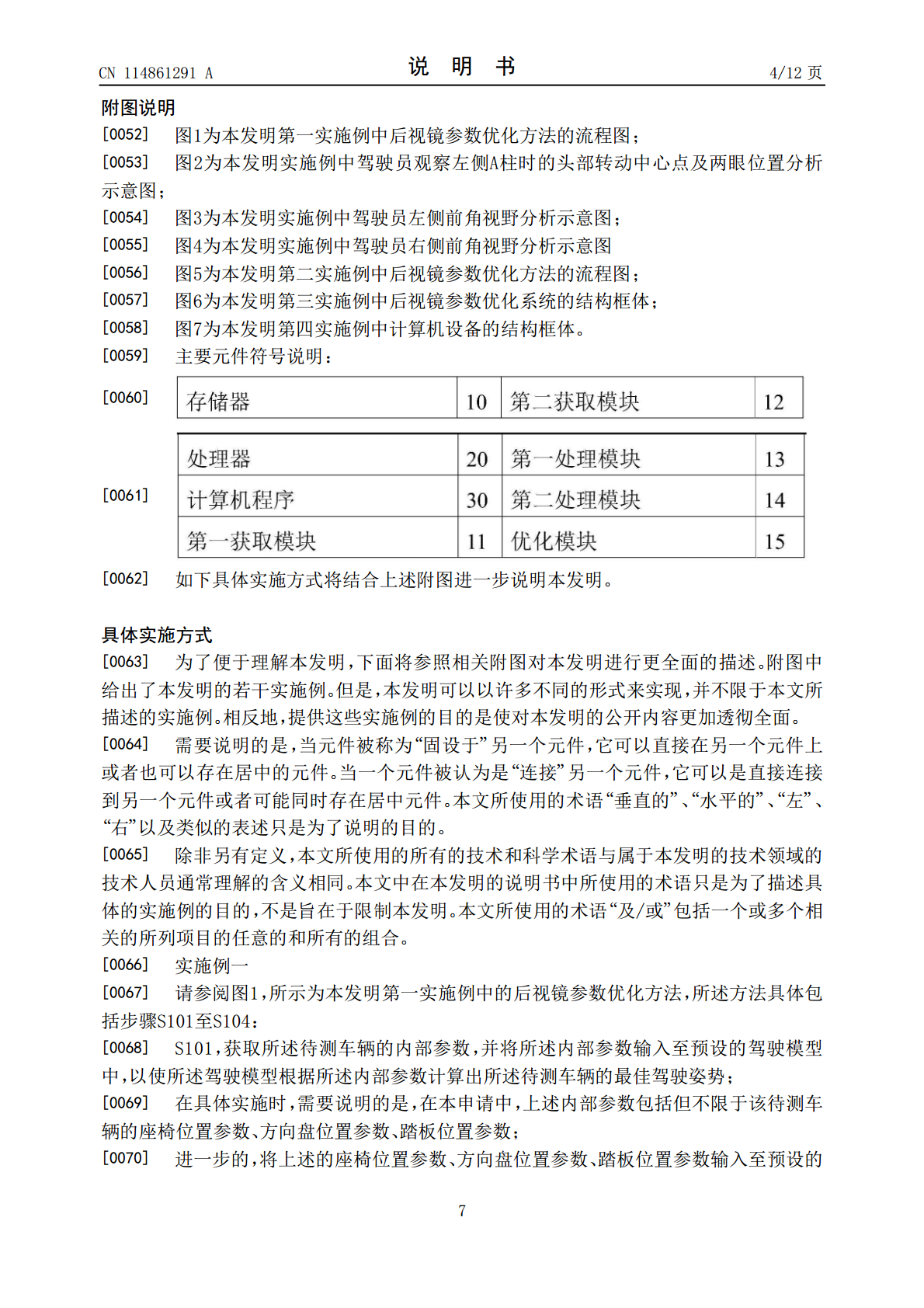
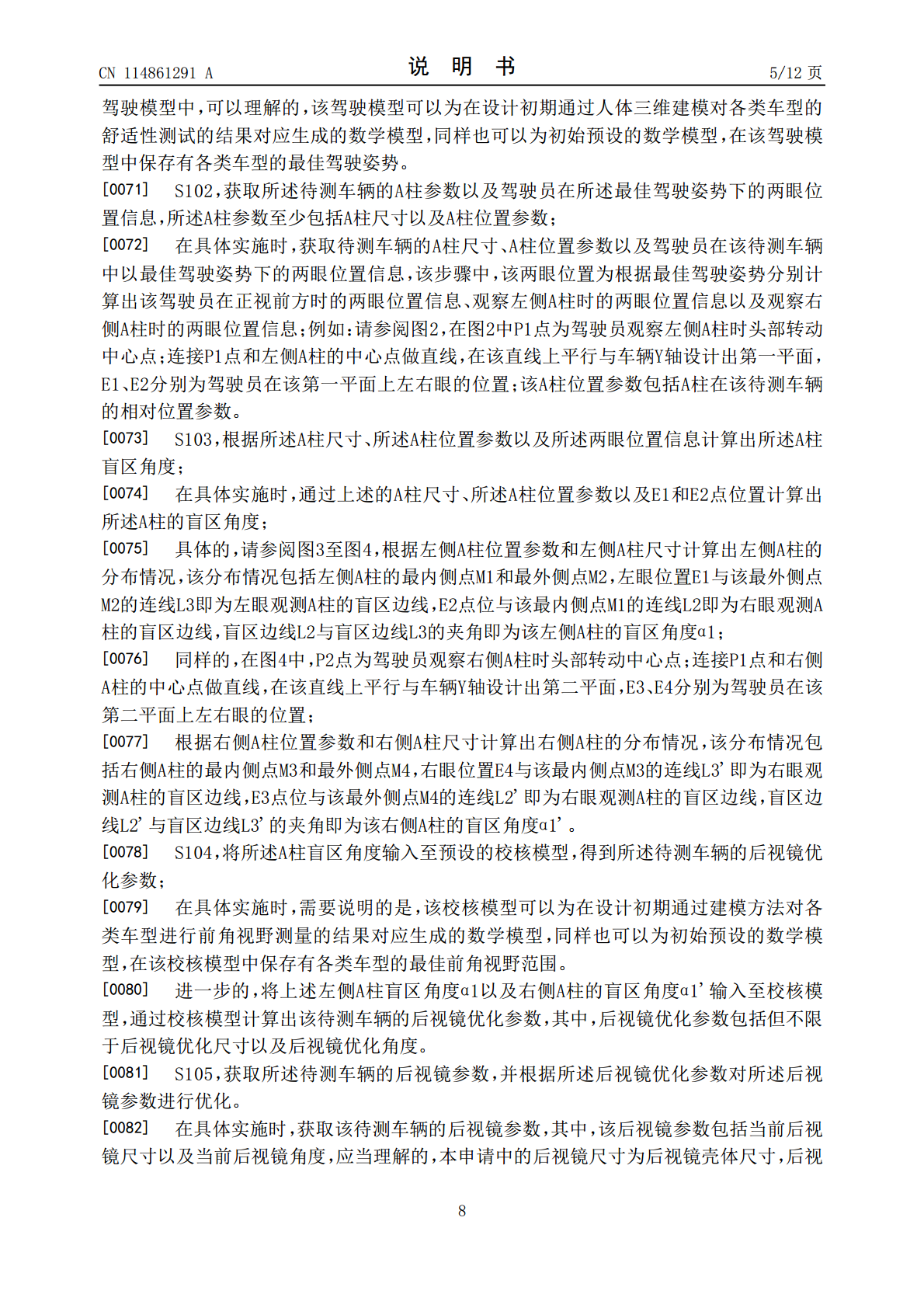
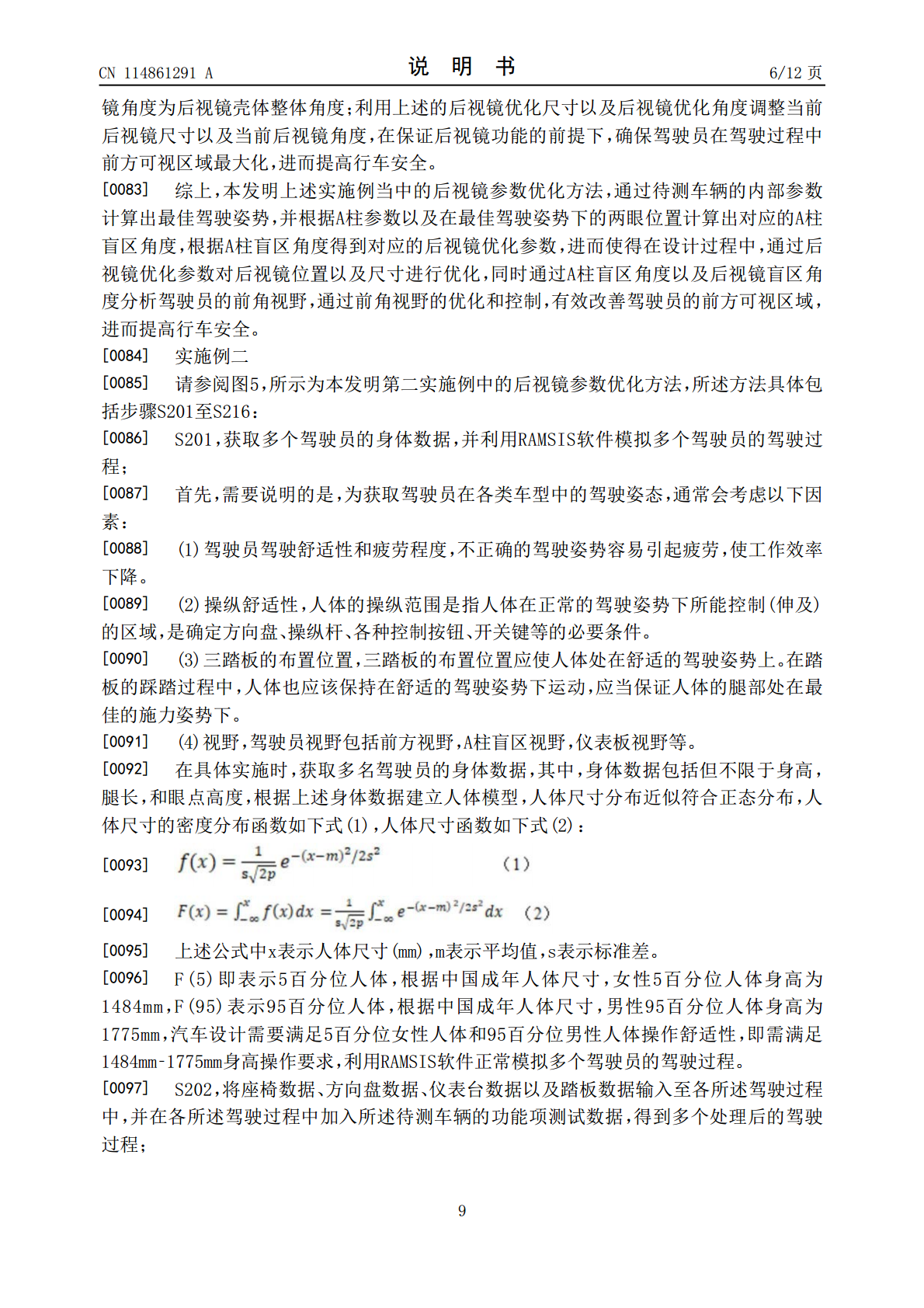
本发明提供一种后视镜参数优化方法、系统、可读存储介质及计算机设备,该方法应用于待测车辆,包括:获取待测车辆的内部参数,并将内部参数输入至预设的驾驶模型中,以使驾驶模型根据内部参数计算出待测车辆的最佳驾驶姿势;获取待测车辆的A柱参数以及驾驶员在最佳驾驶姿势下的两眼位置信息,A柱参数至少包括A柱尺寸以及A柱位置参数;根据A柱尺寸、A柱位置参数以及两眼位置信息计算出A柱盲区角度;将A柱盲区角度输入至预设的校核模型,得到待测车辆的后视镜优化参数;获取待测车辆的后视镜参数,并根据后视镜优化参数对后视镜参数进行优化。
参数采集测试系统、方法、设备及计算机可读存储介质.pdf
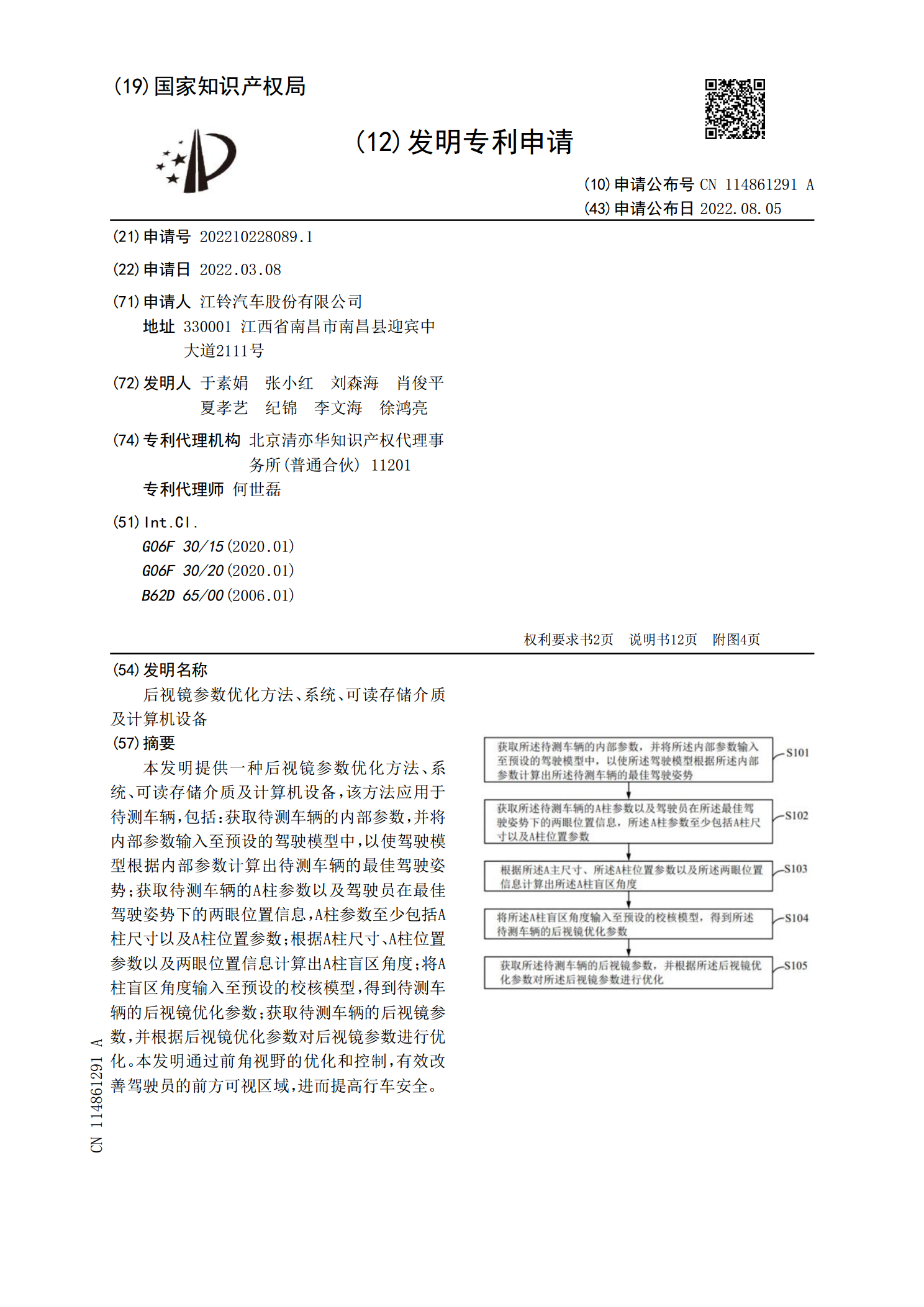
本发明公开了一种参数采集测试系统、方法、设备及计算机可读存储介质。所述参数采集测试系统包括车身、真值参数采集装置、智驾感知传感器装置、数据处理装置以及若干个安装支架;其中,所述安装支架固定在车身,所述真值参数采集装置通过所述安装支架固定在车身车顶,所述智驾感知传感器装置通过所述安装支架固定在车身车头部分;所述数据处理装置安装在车身内部,用于处理所述真值参数采集装置和智驾感知传感器装置所采集到的数据。本发明实现了准确获取智驾感知传感器对车辆目标运动属性的识别性能参数。
参数计算方法、系统、可读存储介质及计算机设备.pdf
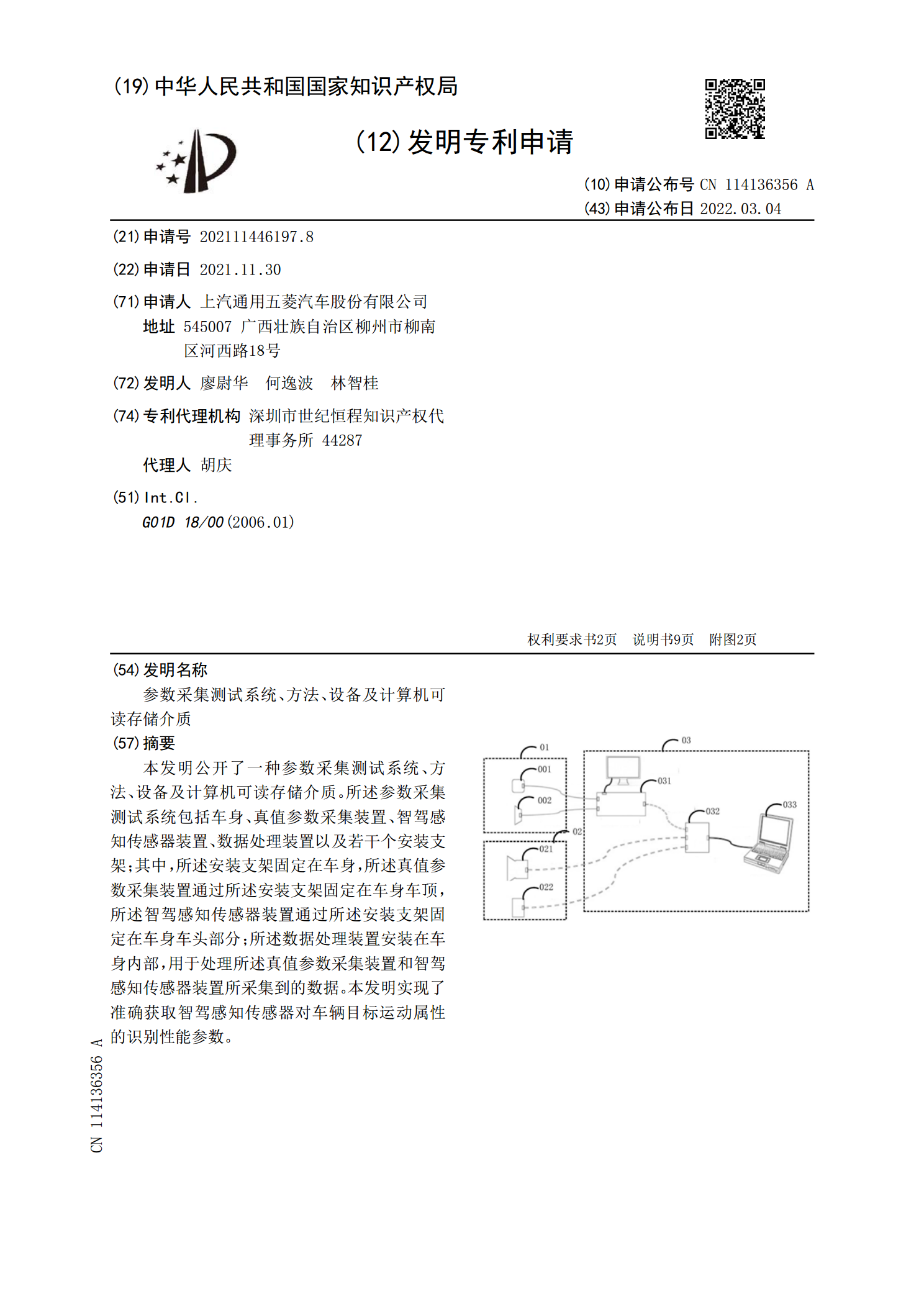
本发明提供了一种参数计算方法、系统、可读存储介质及计算机设备,该方法包括:对血管影像进行处理,以分别获取主动脉和冠脉基于像素的初步分割;从主动脉的像素初步分割中抽取主动脉的中心线,且沿主动脉的中心线计算主动脉的光滑轮廓曲线,并从冠脉的像素初步分割中抽取冠脉的中心线,沿冠脉的中心线计算冠脉的光滑轮廓曲线;根据中心线及轮廓曲线,分别建立主动脉和冠脉的三维模型,并进行组合,以得到血管的三维模型;将血管的三维模型网格化,以得到模型网格信息;根据模型网格信息,求解流体力学方程,以得到血液动力学参数。本发明当中的参数
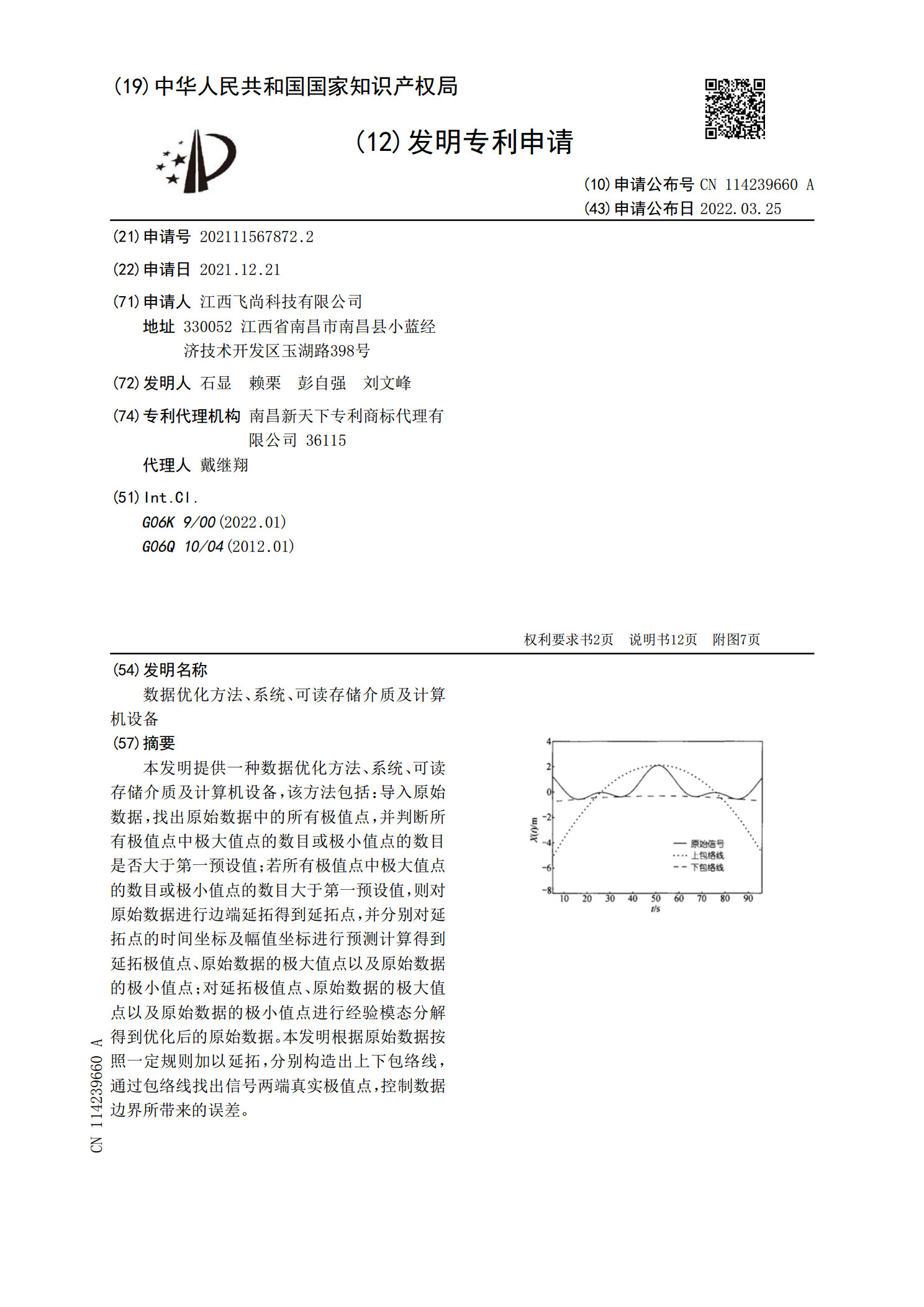
数据优化方法、系统、可读存储介质及计算机设备.pdf
本发明提供一种数据优化方法、系统、可读存储介质及计算机设备,该方法包括:导入原始数据,找出原始数据中的所有极值点,并判断所有极值点中极大值点的数目或极小值点的数目是否大于第一预设值;若所有极值点中极大值点的数目或极小值点的数目大于第一预设值,则对原始数据进行边端延拓得到延拓点,并分别对延拓点的时间坐标及幅值坐标进行预测计算得到延拓极值点、原始数据的极大值点以及原始数据的极小值点;对延拓极值点、原始数据的极大值点以及原始数据的极小值点进行经验模态分解得到优化后的原始数据。本发明根据原始数据按照一定规则加以延
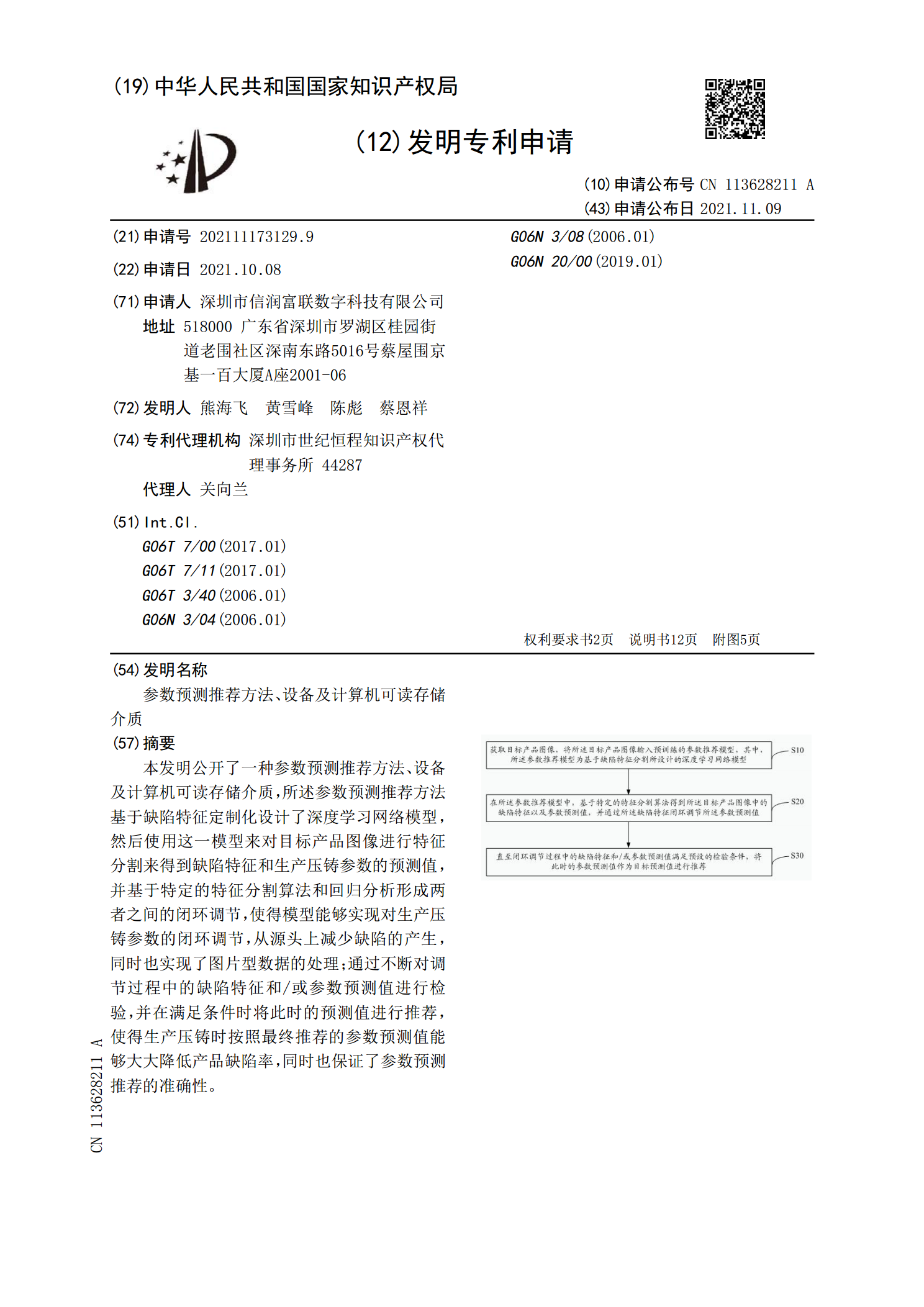
参数预测推荐方法、设备及计算机可读存储介质.pdf
本发明公开了一种参数预测推荐方法、设备及计算机可读存储介质,所述参数预测推荐方法基于缺陷特征定制化设计了深度学习网络模型,然后使用这一模型来对目标产品图像进行特征分割来得到缺陷特征和生产压铸参数的预测值,并基于特定的特征分割算法和回归分析形成两者之间的闭环调节,使得模型能够实现对生产压铸参数的闭环调节,从源头上减少缺陷的产生,同时也实现了图片型数据的处理;通过不断对调节过程中的缺陷特征和/或参数预测值进行检验,并在满足条件时将此时的预测值进行推荐,使得生产压铸时按照最终推荐的参数预测值能够大大降低产品缺陷