
基于机器视觉的盲孔深度测量方法及装置.pdf

长春****主a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机器视觉的盲孔深度测量方法及装置.pdf
本发明提供了一种基于机器视觉的盲孔深度测量方法及装置,涉及机器视觉技术领域,首先接收摄像设备采集的待测盲孔的图像信息,其中,图像信息中包括待测盲孔形成的圆环,圆环包括待测盲孔的第一面形成的第一圆形和待测盲孔的第二面形成的第二圆形,第一面与所述第二面相对,第一面与摄像设备之间的距离小于第二面与摄像设备之间的距离;然后获取图像信息中的第一圆形的半径作为第一半径,并获取图像信息中的第二圆形的半径作为第二半径,其中,第一半径大于第二半径;基于第一半径和第二半径获得待测盲孔的深度,结合视觉检测技术,自动、快速、精确
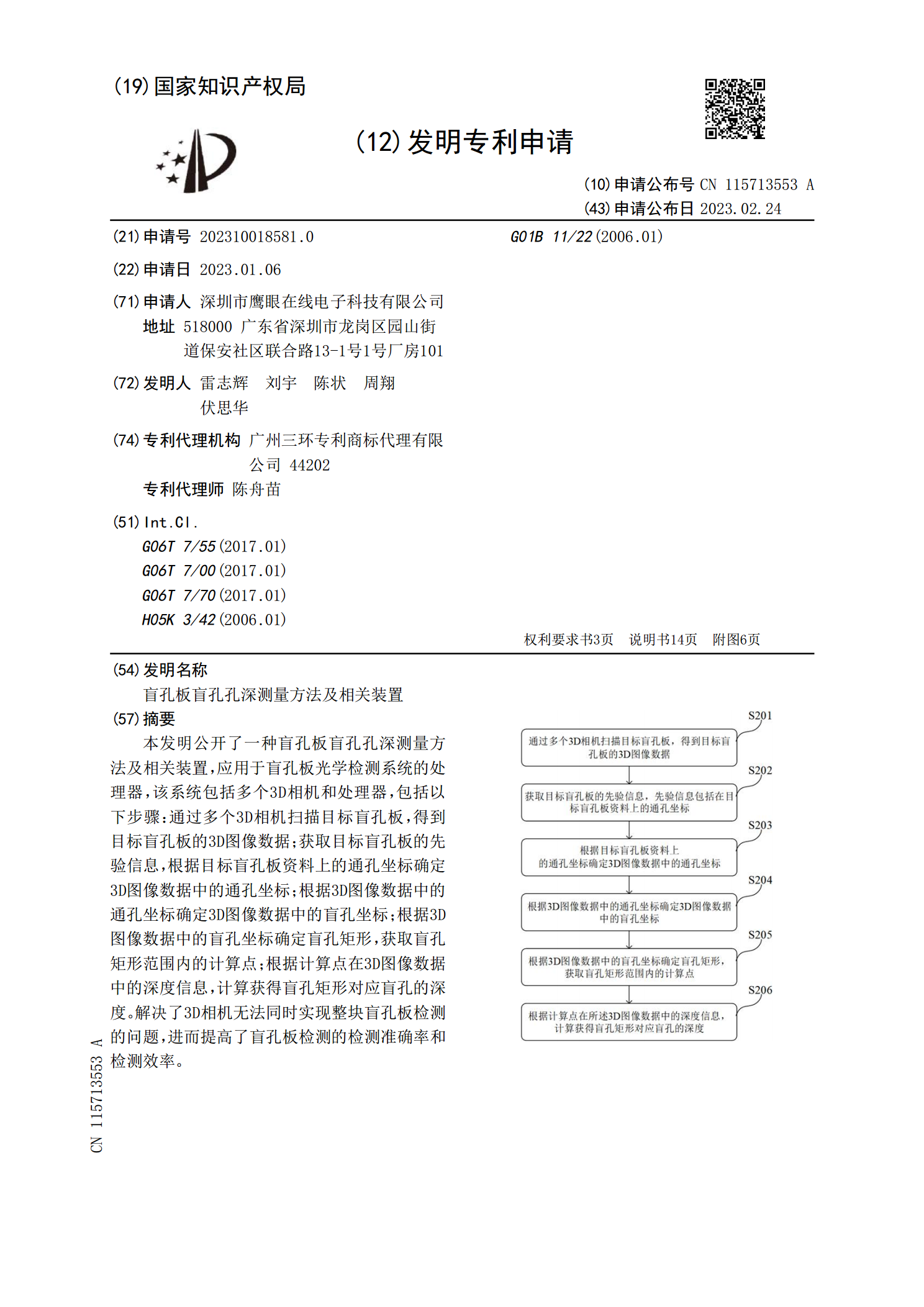
盲孔板盲孔孔深测量方法及相关装置.pdf
本发明公开了一种盲孔板盲孔孔深测量方法及相关装置,应用于盲孔板光学检测系统的处理器,该系统包括多个3D相机和处理器,包括以下步骤:通过多个3D相机扫描目标盲孔板,得到目标盲孔板的3D图像数据;获取目标盲孔板的先验信息,根据目标盲孔板资料上的通孔坐标确定3D图像数据中的通孔坐标;根据3D图像数据中的通孔坐标确定3D图像数据中的盲孔坐标;根据3D图像数据中的盲孔坐标确定盲孔矩形,获取盲孔矩形范围内的计算点;根据计算点在3D图像数据中的深度信息,计算获得盲孔矩形对应盲孔的深度。解决了3D相机无法同时实现整块盲孔
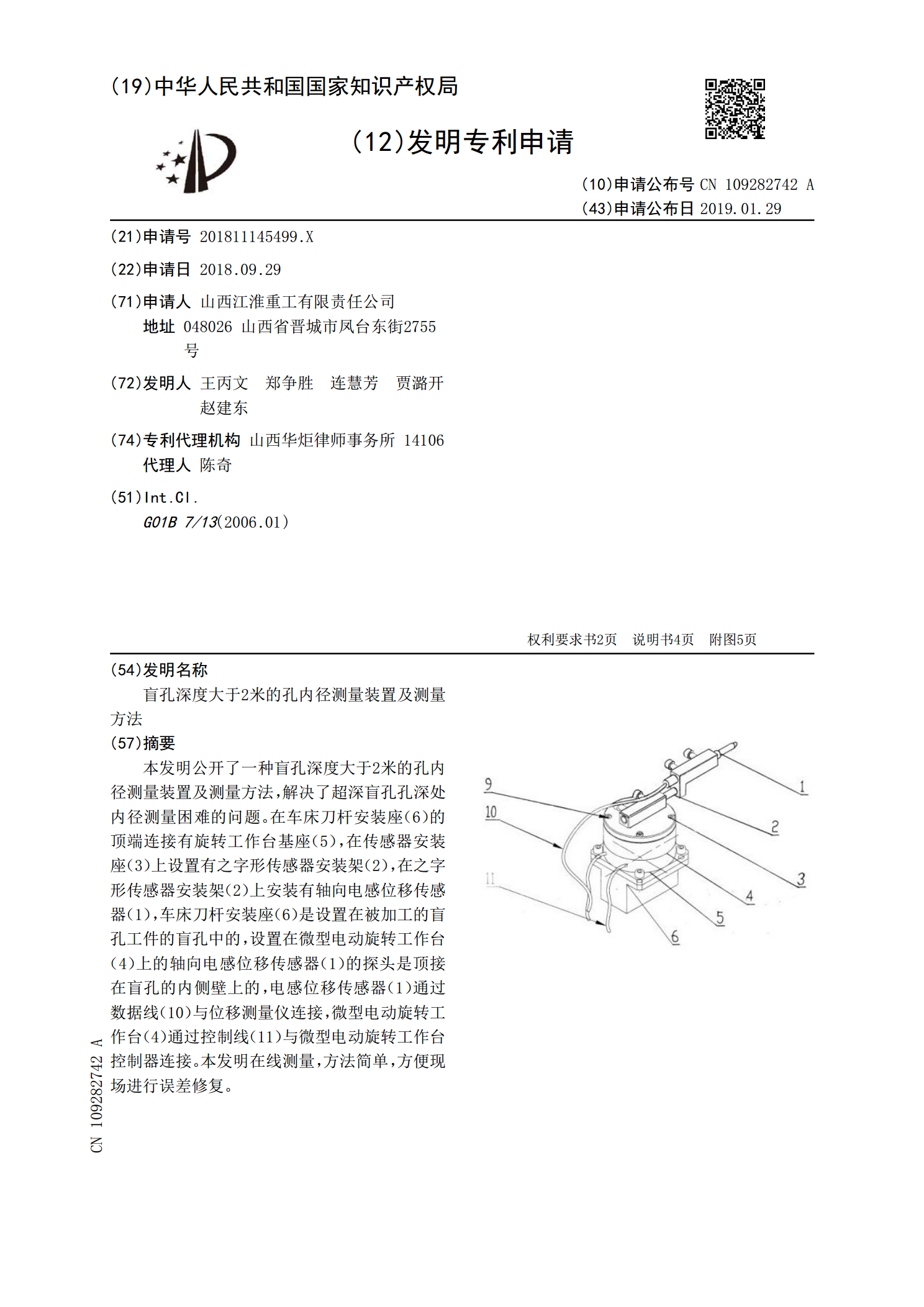
盲孔深度大于2米的孔内径测量装置及测量方法.pdf
本发明公开了一种盲孔深度大于2米的孔内径测量装置及测量方法,解决了超深盲孔孔深处内径测量困难的问题。在车床刀杆安装座(6)的顶端连接有旋转工作台基座(5),在传感器安装座(3)上设置有之字形传感器安装架(2),在之字形传感器安装架(2)上安装有轴向电感位移传感器(1),车床刀杆安装座(6)是设置在被加工的盲孔工件的盲孔中的,设置在微型电动旋转工作台(4)上的轴向电感位移传感器(1)的探头是顶接在盲孔的内侧壁上的,电感位移传感器(1)通过数据线(10)与位移测量仪连接,微型电动旋转工作台(4)通过控制线(1

基于机器视觉的轮胎花纹深度测量方法研究.docx
基于机器视觉的轮胎花纹深度测量方法研究摘要:轮胎是汽车最重要的组件之一,其花纹深度是判断轮胎性能和安全性的关键指标之一。传统的轮胎花纹深度测量方法依赖于人工测量,效率低下且易产生误差。本文提出了基于机器视觉的轮胎花纹深度测量方法,通过图像处理和深度学习技术,实现了自动、高效和准确地测量轮胎花纹深度。实验结果表明,该方法具有较高的准确性和稳定性,能够有效应用于实际生产和质检过程中。1.引言轮胎是汽车行驶过程中最重要的组件之一,其花纹深度是判断轮胎性能和安全性的关键指标。传统的轮胎花纹深度测量方法依赖于人工测
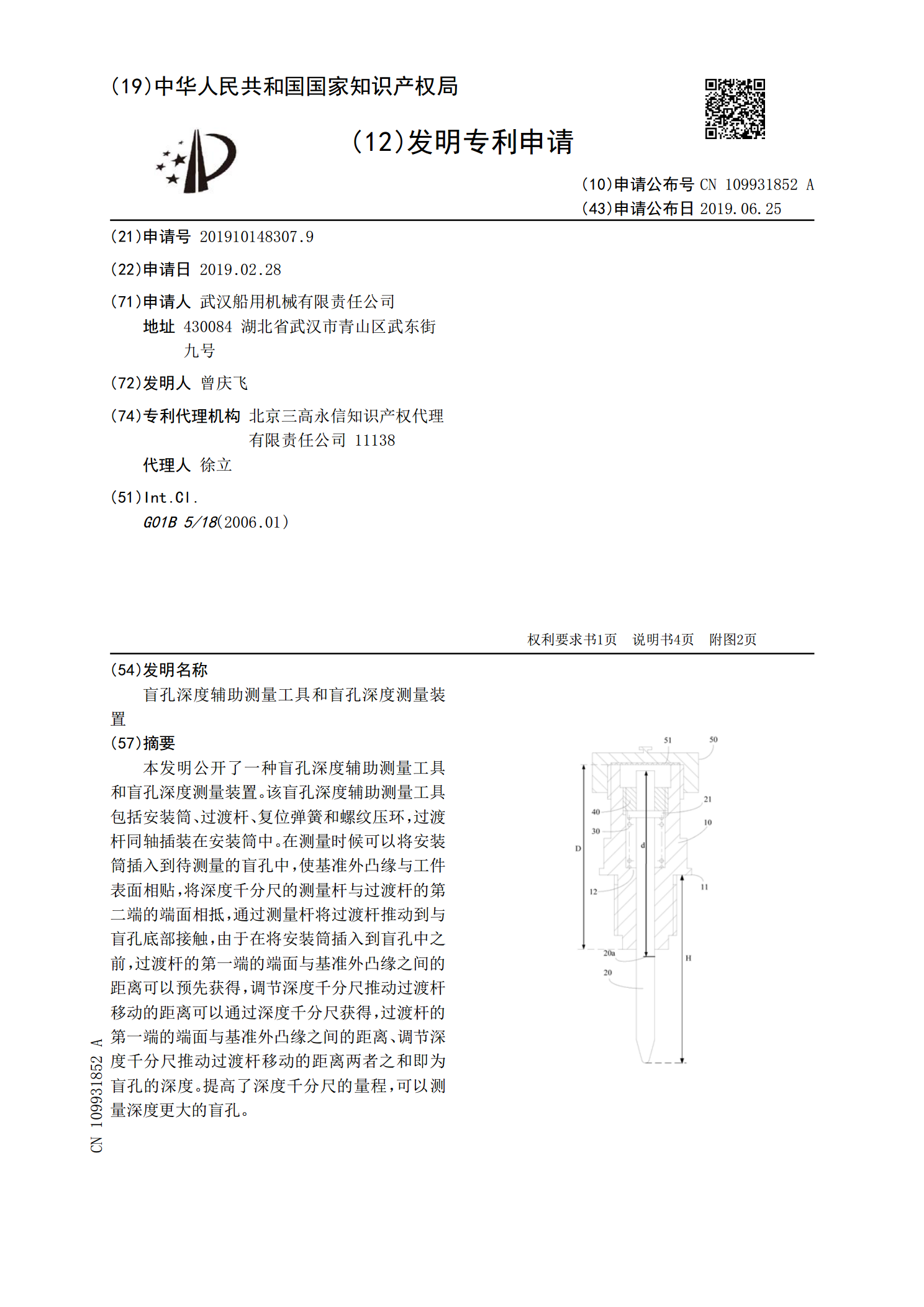
盲孔深度辅助测量工具和盲孔深度测量装置.pdf
本发明公开了一种盲孔深度辅助测量工具和盲孔深度测量装置。该盲孔深度辅助测量工具包括安装筒、过渡杆、复位弹簧和螺纹压环,过渡杆同轴插装在安装筒中。在测量时候可以将安装筒插入到待测量的盲孔中,使基准外凸缘与工件表面相贴,将深度千分尺的测量杆与过渡杆的第二端的端面相抵,通过测量杆将过渡杆推动到与盲孔底部接触,由于在将安装筒插入到盲孔中之前,过渡杆的第一端的端面与基准外凸缘之间的距离可以预先获得,调节深度千分尺推动过渡杆移动的距离可以通过深度千分尺获得,过渡杆的第一端的端面与基准外凸缘之间的距离、调节深度千分尺推