
盲孔板盲孔孔深测量方法及相关装置.pdf

是你****枝呀

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盲孔板盲孔孔深测量方法及相关装置.pdf
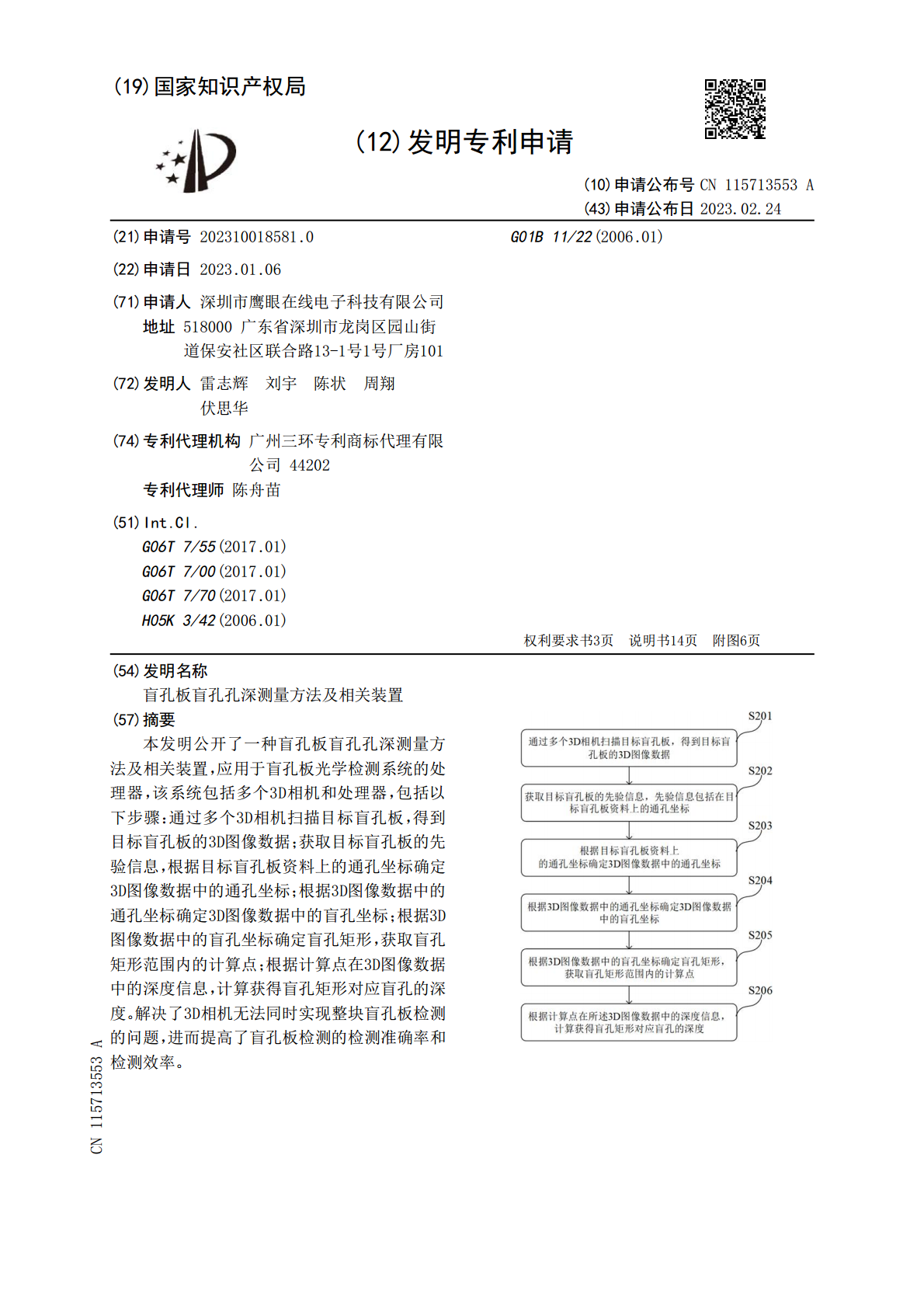
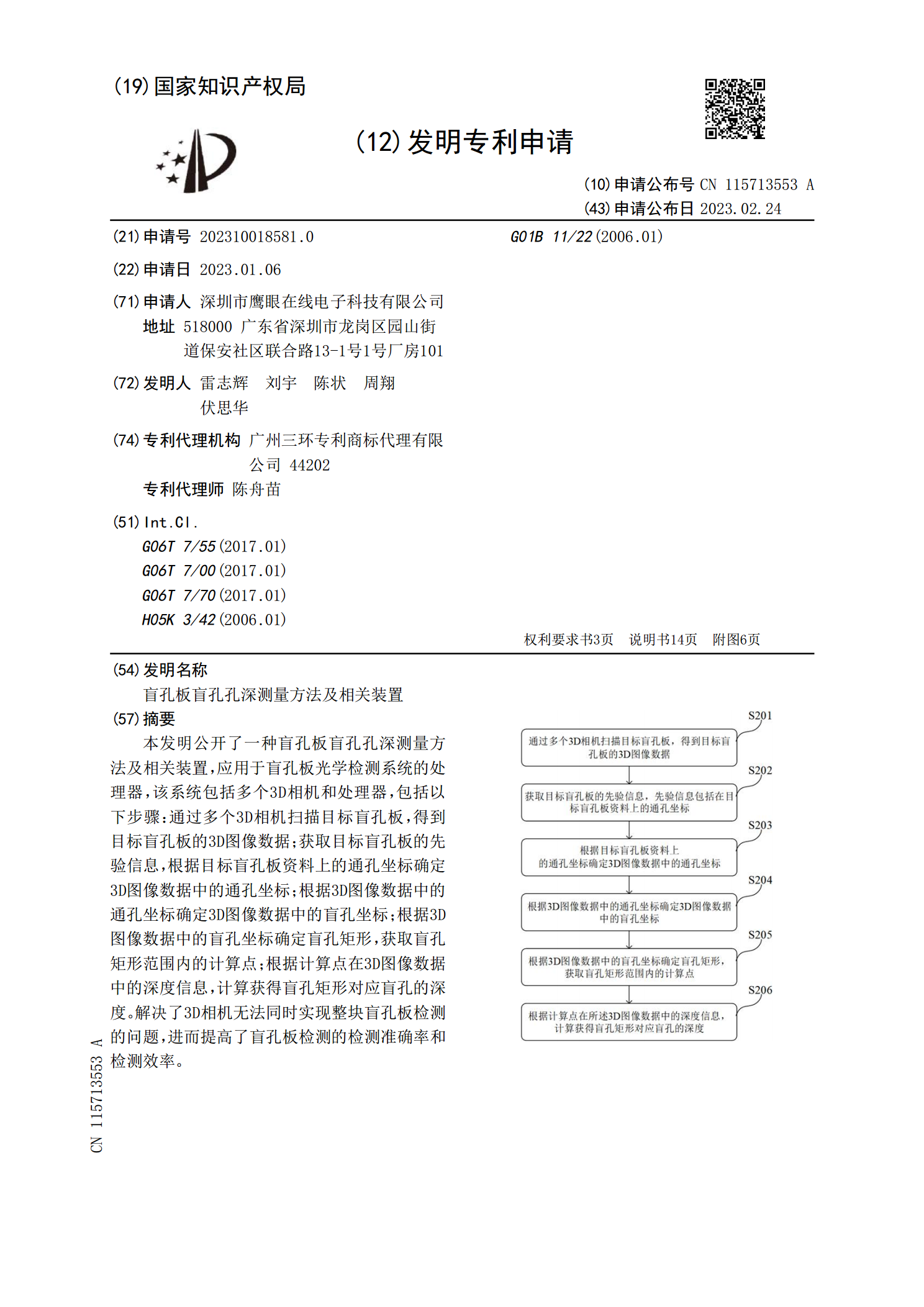
本发明公开了一种盲孔板盲孔孔深测量方法及相关装置,应用于盲孔板光学检测系统的处理器,该系统包括多个3D相机和处理器,包括以下步骤:通过多个3D相机扫描目标盲孔板,得到目标盲孔板的3D图像数据;获取目标盲孔板的先验信息,根据目标盲孔板资料上的通孔坐标确定3D图像数据中的通孔坐标;根据3D图像数据中的通孔坐标确定3D图像数据中的盲孔坐标;根据3D图像数据中的盲孔坐标确定盲孔矩形,获取盲孔矩形范围内的计算点;根据计算点在3D图像数据中的深度信息,计算获得盲孔矩形对应盲孔的深度。解决了3D相机无法同时实现整块盲孔
一种具有防止盲孔缺胶的盲孔板装置.pdf
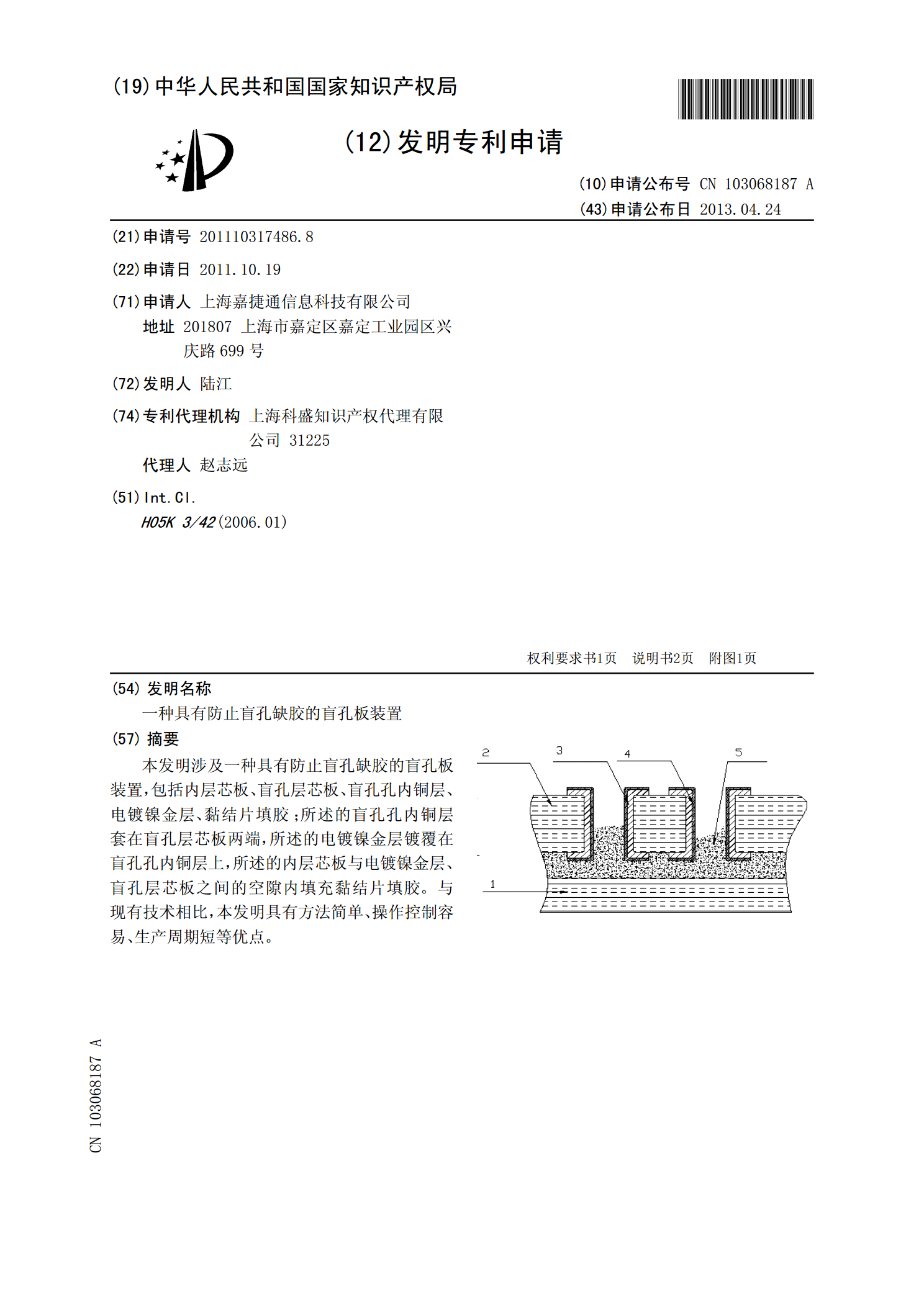
本发明涉及一种具有防止盲孔缺胶的盲孔板装置,包括内层芯板、盲孔层芯板、盲孔孔内铜层、电镀镍金层、黏结片填胶;所述的盲孔孔内铜层套在盲孔层芯板两端,所述的电镀镍金层镀覆在盲孔孔内铜层上,所述的内层芯板与电镀镍金层、盲孔层芯板之间的空隙内填充黏结片填胶。与现有技术相比,本发明具有方法简单、操作控制容易、生产周期短等优点。
深孔油道盲孔接头.pdf
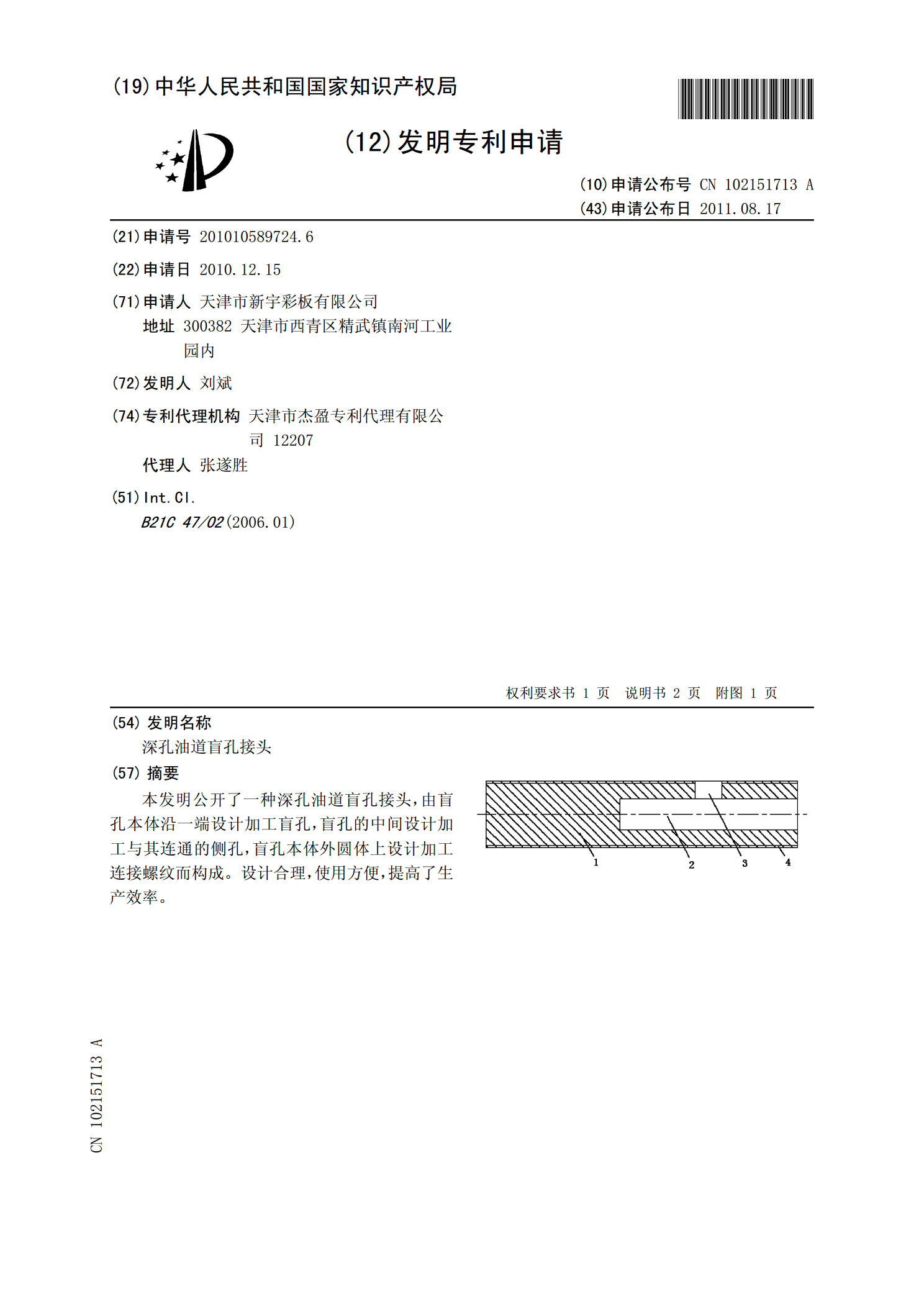
本发明公开了一种深孔油道盲孔接头,由盲孔本体沿一端设计加工盲孔,盲孔的中间设计加工与其连通的侧孔,盲孔本体外圆体上设计加工连接螺纹而构成。设计合理,使用方便,提高了生产效率。
超深盲孔深度测量装置.pdf
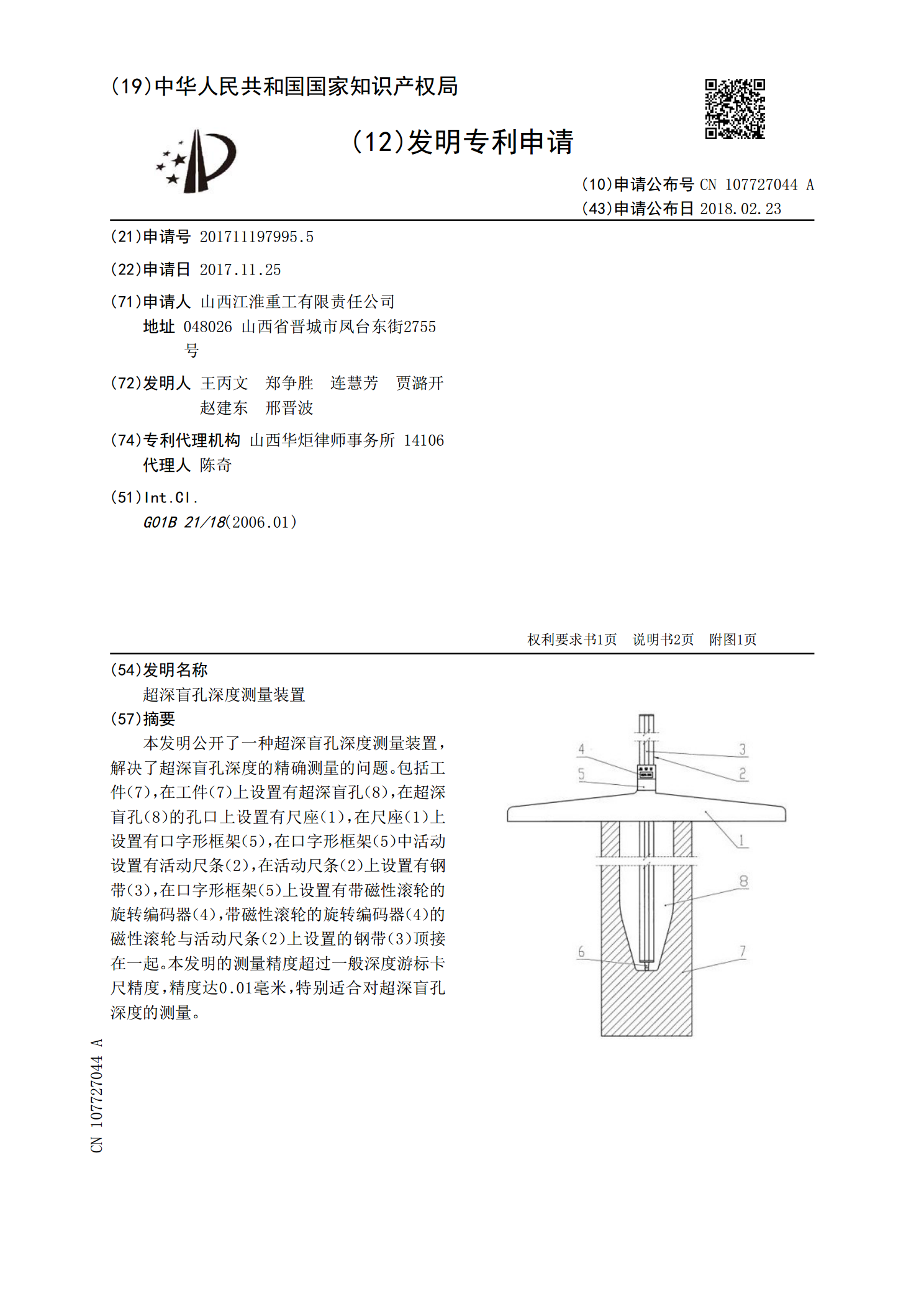
本发明公开了一种超深盲孔深度测量装置,解决了超深盲孔深度的精确测量的问题。包括工件(7),在工件(7)上设置有超深盲孔(8),在超深盲孔(8)的孔口上设置有尺座(1),在尺座(1)上设置有口字形框架(5),在口字形框架(5)中活动设置有活动尺条(2),在活动尺条(2)上设置有钢带(3),在口字形框架(5)上设置有带磁性滚轮的旋转编码器(4),带磁性滚轮的旋转编码器(4)的磁性滚轮与活动尺条(2)上设置的钢带(3)顶接在一起。本发明的测量精度超过一般深度游标卡尺精度,精度达0.01毫米,特别适合对超深盲孔深

一种深度盲孔的孔深在线测量装置.pdf
本发明涉及一种深度盲孔的孔深在线测量装置,采用相对测量的原理,通过测量杆感知盲孔深度,由位移传感器进行在线测量。其主要结构是测量杆通过导杆左连接块连接两根导杆,两根导杆滑配安装在测量安装座左端的直线轴承内,导杆左连接块和每个直线轴承之间分别套装一根弹簧,以使导杆左连接块始终具有测量力;测量安装座中间固定安装一个直线位移传感器,其测头顶在传感器触点块上。测量安装座在推动气缸作用下,带动测量杆深入深孔底部,测量杆和导杆左连接块之间的相对位移量,即为相对于标准盲孔深度的偏差量。本发明可以针对不同直径大小和不同深