
导盲机器人系统.pdf

沛芹****ng

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导盲机器人系统.pdf
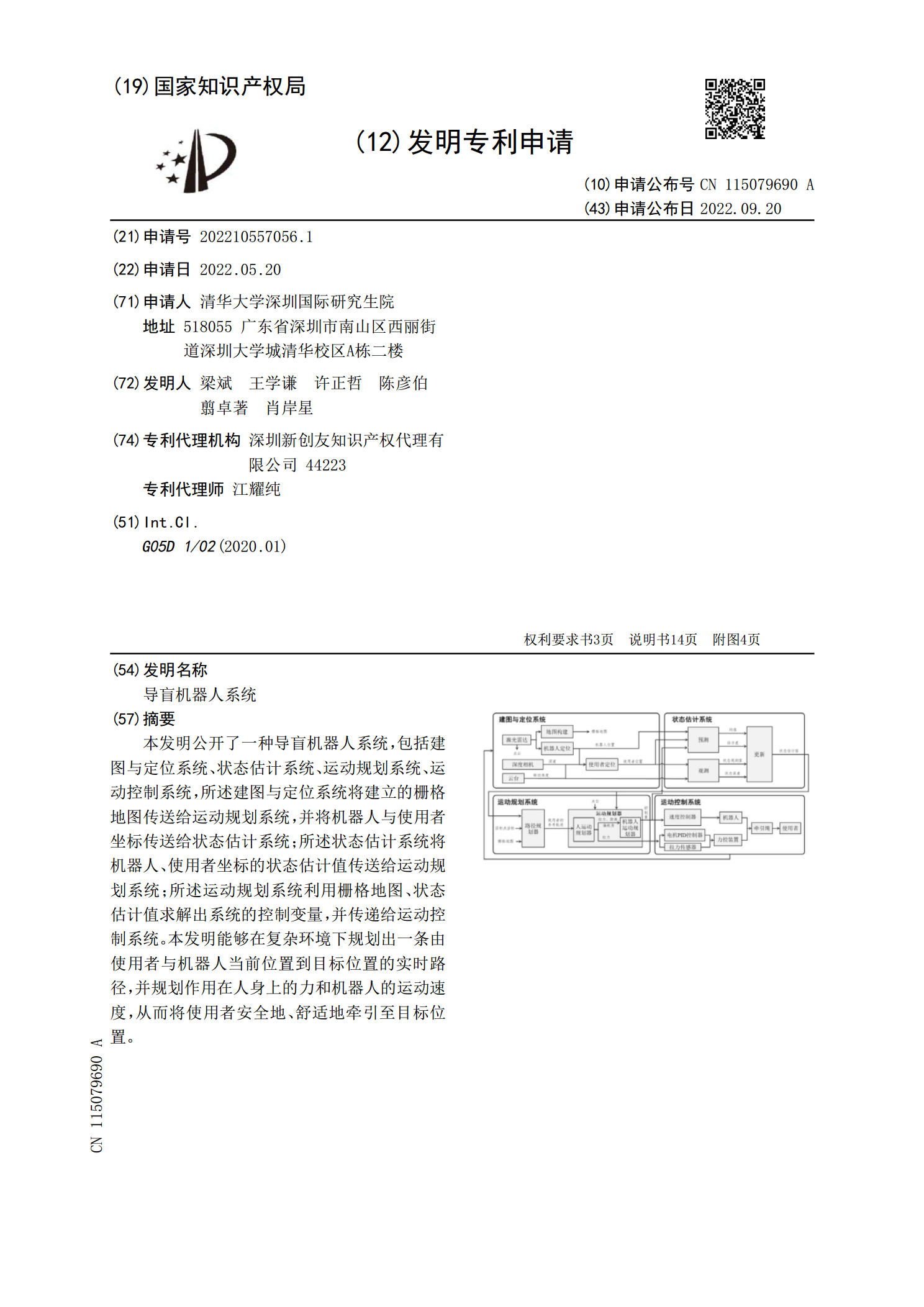
本发明公开了一种导盲机器人系统,包括建图与定位系统、状态估计系统、运动规划系统、运动控制系统,所述建图与定位系统将建立的栅格地图传送给运动规划系统,并将机器人与使用者坐标传送给状态估计系统;所述状态估计系统将机器人、使用者坐标的状态估计值传送给运动规划系统;所述运动规划系统利用栅格地图、状态估计值求解出系统的控制变量,并传递给运动控制系统。本发明能够在复杂环境下规划出一条由使用者与机器人当前位置到目标位置的实时路径,并规划作用在人身上的力和机器人的运动速度,从而将使用者安全地、舒适地牵引至目标位置。
一种导盲机器人及导盲系统、导盲方法.pdf
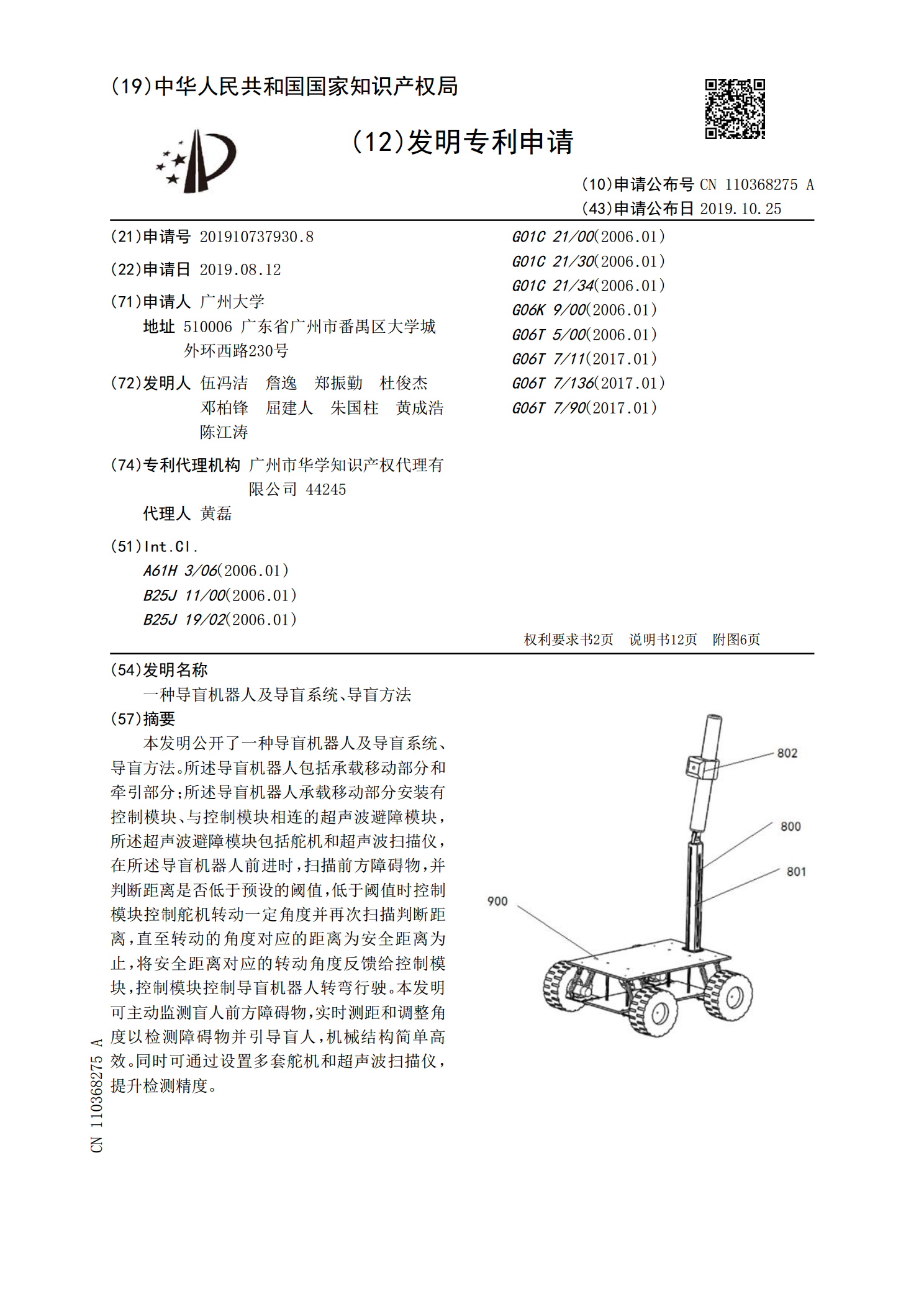
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并
一种导盲机器人及其公交导盲报警系统.pdf
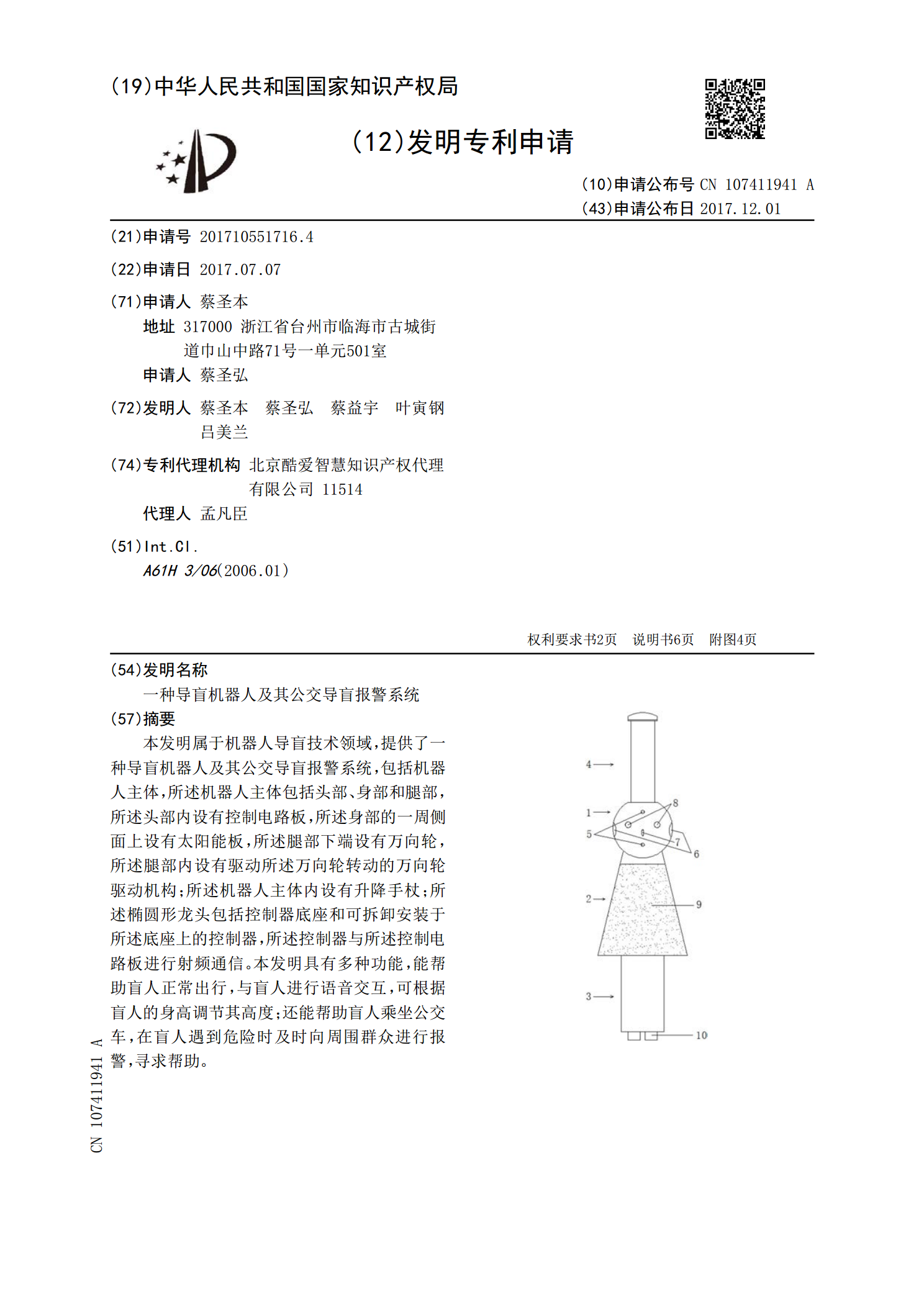
本发明属于机器人导盲技术领域,提供了一种导盲机器人及其公交导盲报警系统,包括机器人主体,所述机器人主体包括头部、身部和腿部,所述头部内设有控制电路板,所述身部的一周侧面上设有太阳能板,所述腿部下端设有万向轮,所述腿部内设有驱动所述万向轮转动的万向轮驱动机构;所述机器人主体内设有升降手杖;所述椭圆形龙头包括控制器底座和可拆卸安装于所述底座上的控制器,所述控制器与所述控制电路板进行射频通信。本发明具有多种功能,能帮助盲人正常出行,与盲人进行语音交互,可根据盲人的身高调节其高度;还能帮助盲人乘坐公交车,在盲人遇

一种移动型导盲机器人系统及导盲方法.pdf
本发明涉及一种移动型导盲机器人系统及导盲方法,属于残疾人辅助设备领域。本发明能够实时的进行非结构化环境下的多源融合感知及智能评估,进而将评估结果提供给复杂环境约束下的决策规划模块进行运算,不仅能实现实时环境感知,同时可进行实时决策,实现全自主的路径引导。能够基于多源融合进行路面评估,从材质和平坦性两个维度对路面进行融合评估,获得更为全面的信息。当前的代表性方案普遍使用语义分割技术判别可行路面,通过RGB‑D数据,融合平坦度检测和材质检测,能为盲人更好更全面的探测和评估路面可通行性。

导盲机器人.pdf
本发明提供了一种导盲机器人,本发明提供的导盲机器人中,设置有行走驱动装置以及速度传感器;行走驱动装置能够根据速度传感器检测到的盲人的行走速度控制导盲机器人的行走速度,使导盲机器人的行走速度与盲人的行走速度匹配。从而本发明提供的导盲机器人能够很好的适应盲人的行走速度。