
车辆预警提示方法、装置、基站及存储介质.pdf

mm****酱吖


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆预警提示方法、装置、基站及存储介质.pdf
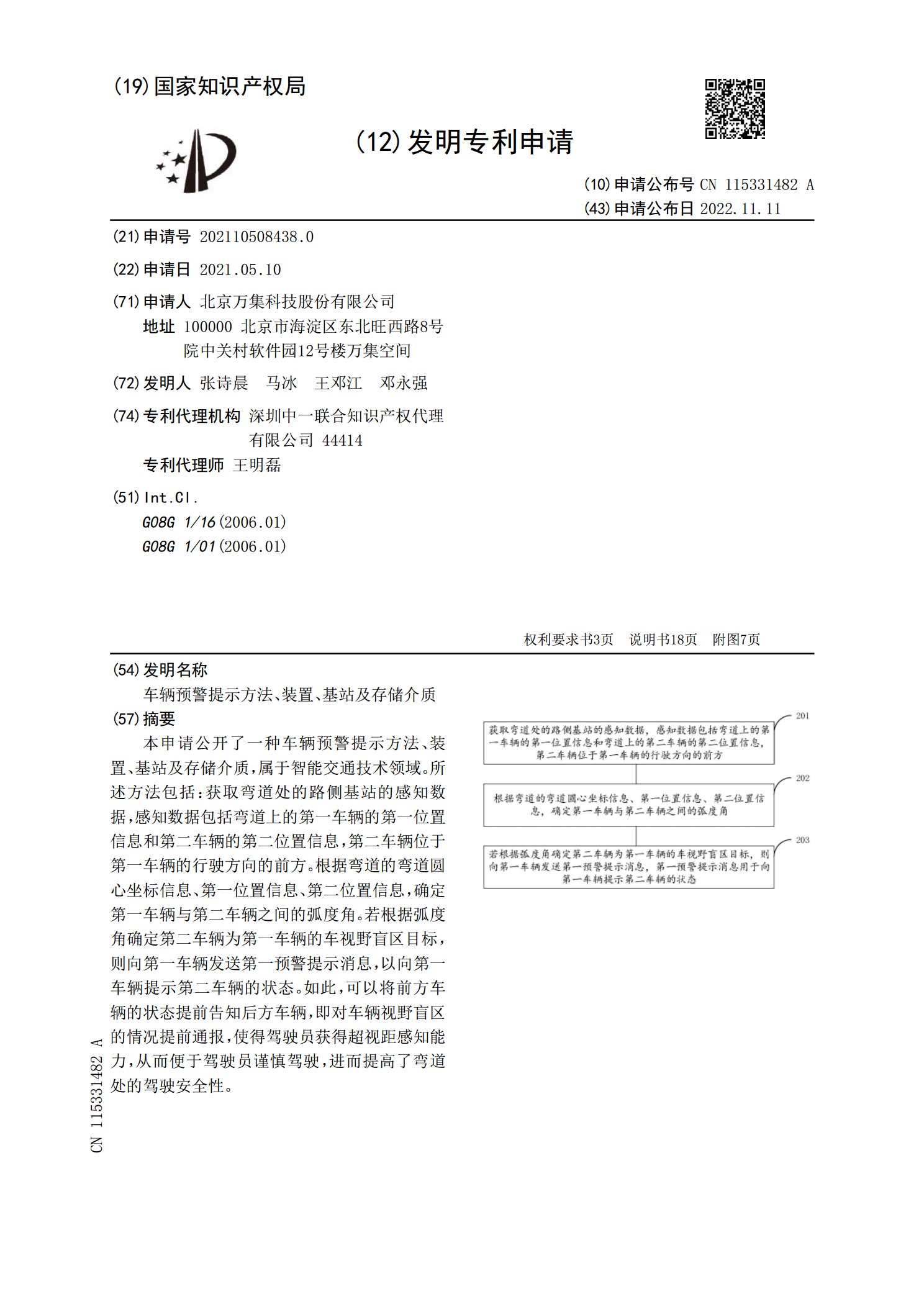
本申请公开了一种车辆预警提示方法、装置、基站及存储介质,属于智能交通技术领域。所述方法包括:获取弯道处的路侧基站的感知数据,感知数据包括弯道上的第一车辆的第一位置信息和第二车辆的第二位置信息,第二车辆位于第一车辆的行驶方向的前方。根据弯道的弯道圆心坐标信息、第一位置信息、第二位置信息,确定第一车辆与第二车辆之间的弧度角。若根据弧度角确定第二车辆为第一车辆的车视野盲区目标,则向第一车辆发送第一预警提示消息,以向第一车辆提示第二车辆的状态。如此,可以将前方车辆的状态提前告知后方车辆,即对车辆视野盲区的情况提前
车辆预警方法、装置、设备及存储介质.pdf
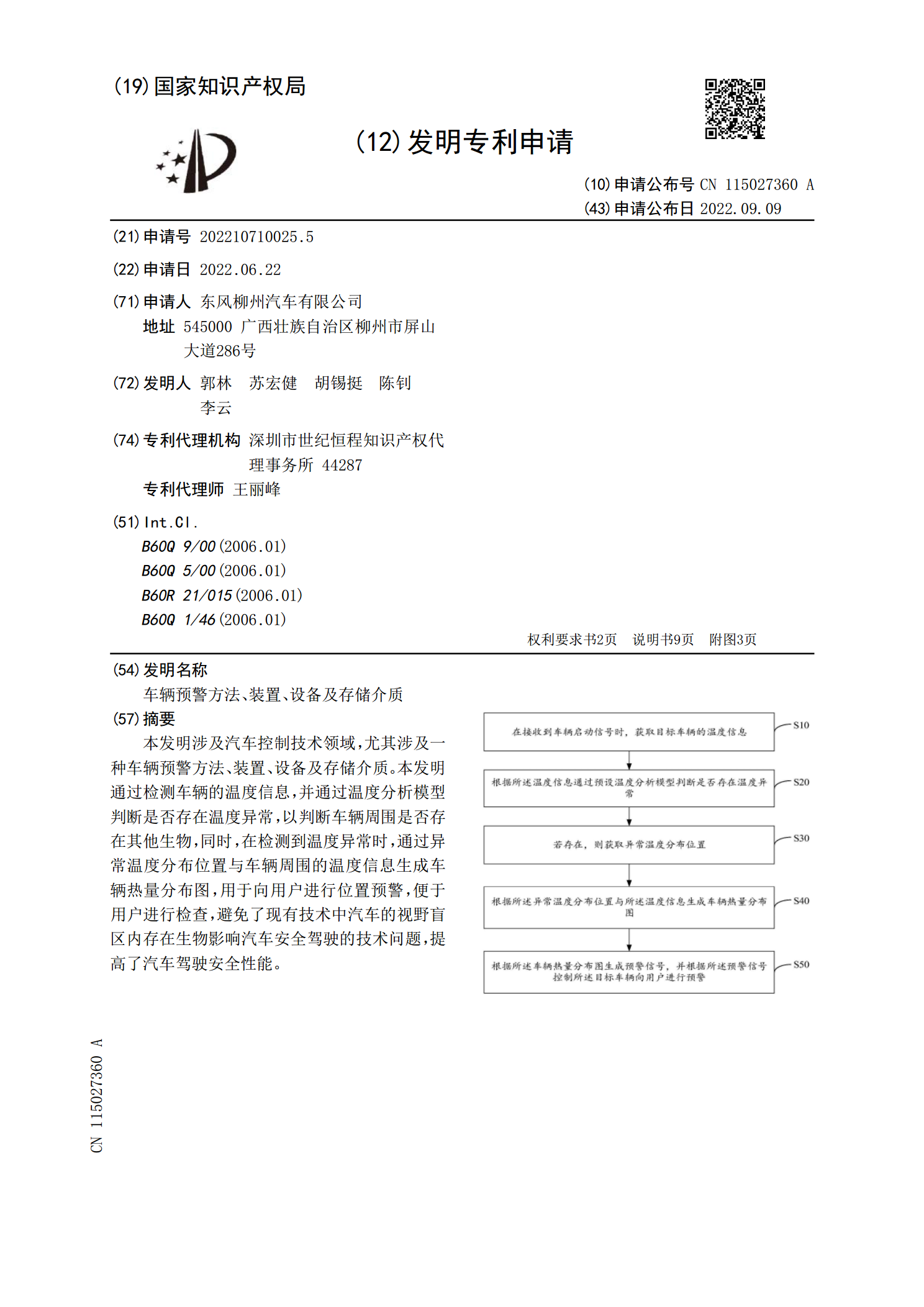
本发明涉及汽车控制技术领域,尤其涉及一种车辆预警方法、装置、设备及存储介质。本发明通过检测车辆的温度信息,并通过温度分析模型判断是否存在温度异常,以判断车辆周围是否存在其他生物,同时,在检测到温度异常时,通过异常温度分布位置与车辆周围的温度信息生成车辆热量分布图,用于向用户进行位置预警,便于用户进行检查,避免了现有技术中汽车的视野盲区内存在生物影响汽车安全驾驶的技术问题,提高了汽车驾驶安全性能。
安全预警方法、装置、车辆及存储介质.pdf
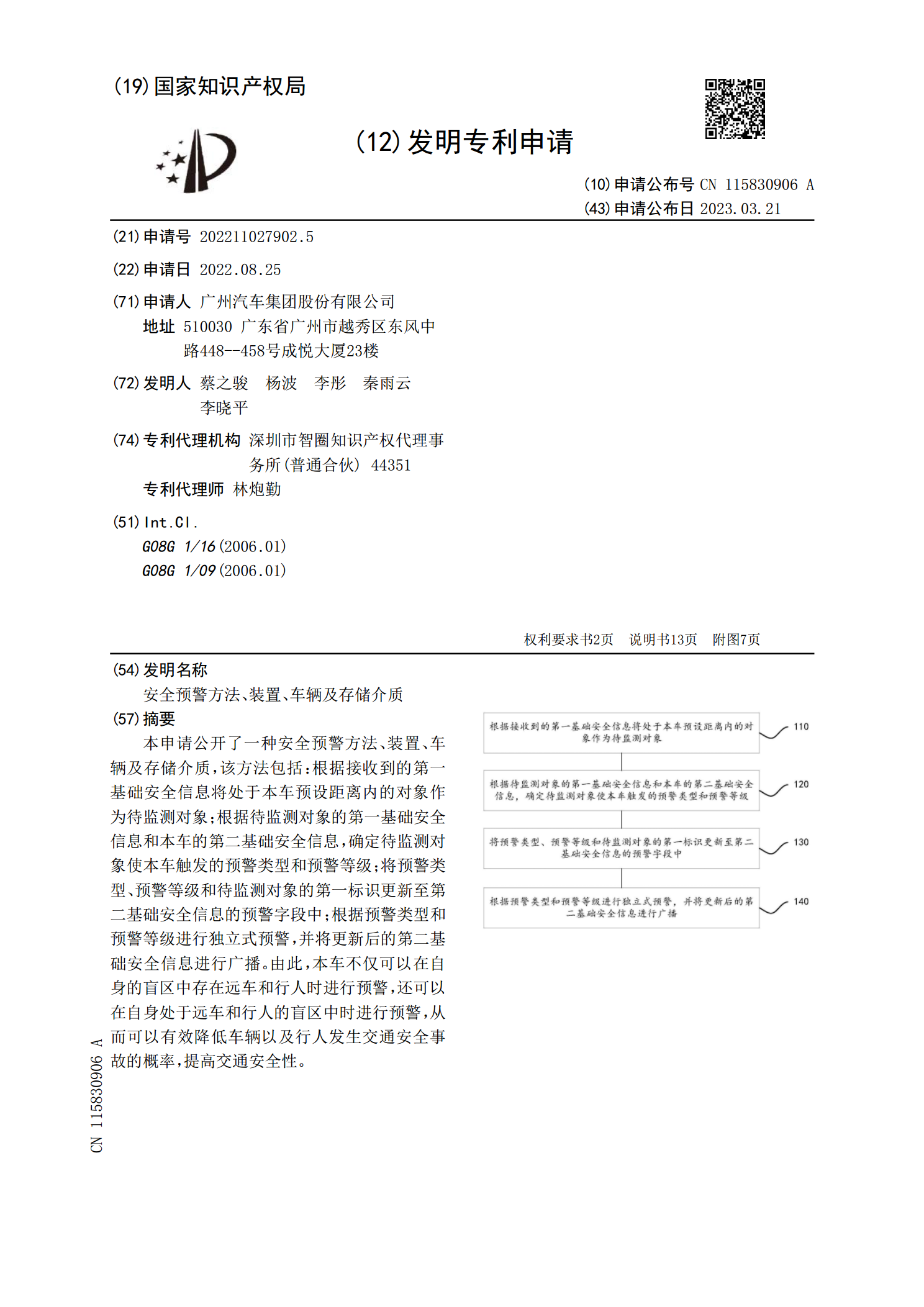
本申请公开了一种安全预警方法、装置、车辆及存储介质,该方法包括:根据接收到的第一基础安全信息将处于本车预设距离内的对象作为待监测对象;根据待监测对象的第一基础安全信息和本车的第二基础安全信息,确定待监测对象使本车触发的预警类型和预警等级;将预警类型、预警等级和待监测对象的第一标识更新至第二基础安全信息的预警字段中;根据预警类型和预警等级进行独立式预警,并将更新后的第二基础安全信息进行广播。由此,本车不仅可以在自身的盲区中存在远车和行人时进行预警,还可以在自身处于远车和行人的盲区中时进行预警,从而可以有效降
信息提示方法、装置、存储介质和车辆.pdf
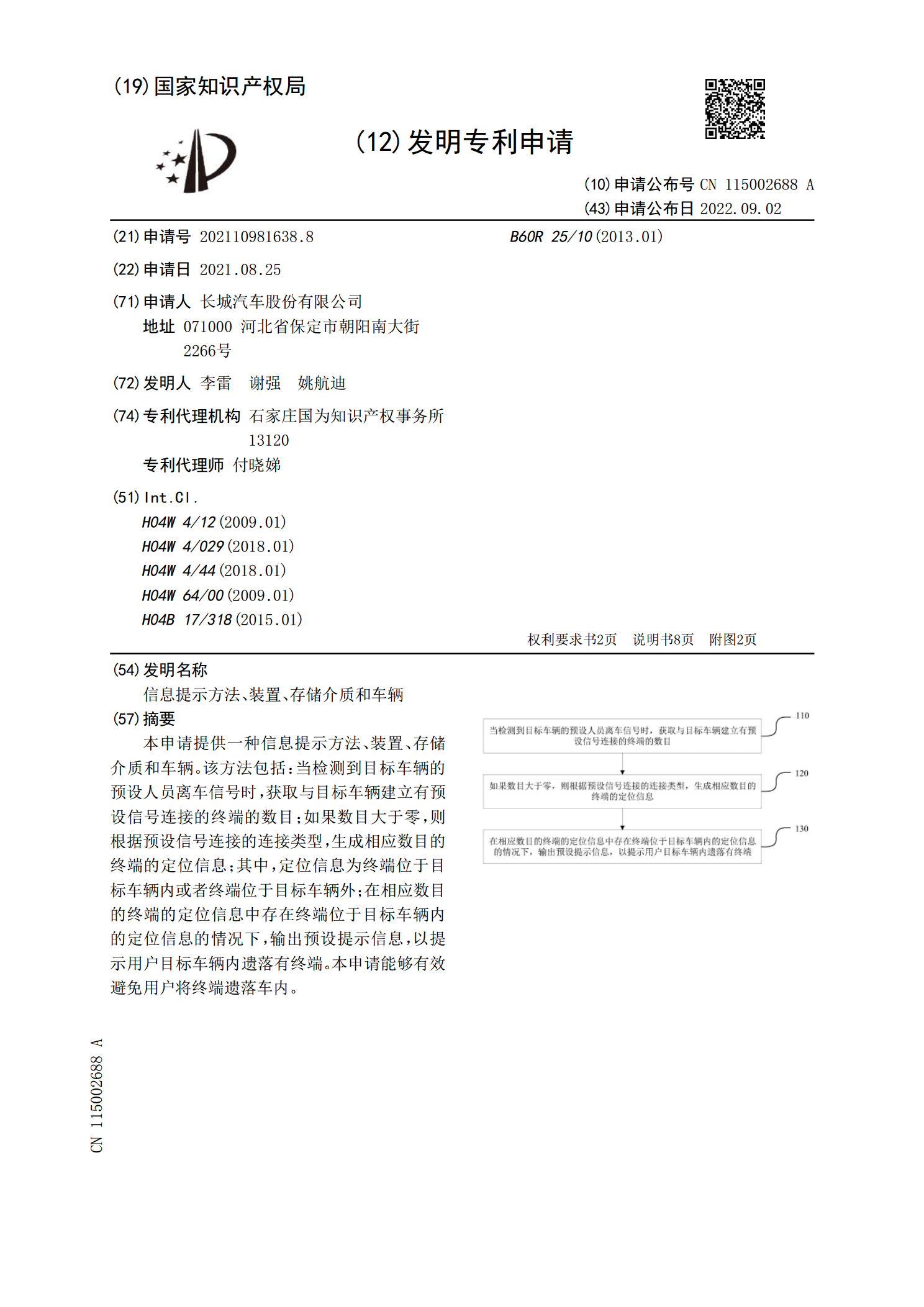
本申请提供一种信息提示方法、装置、存储介质和车辆。该方法包括:当检测到目标车辆的预设人员离车信号时,获取与目标车辆建立有预设信号连接的终端的数目;如果数目大于零,则根据预设信号连接的连接类型,生成相应数目的终端的定位信息;其中,定位信息为终端位于目标车辆内或者终端位于目标车辆外;在相应数目的终端的定位信息中存在终端位于目标车辆内的定位信息的情况下,输出预设提示信息,以提示用户目标车辆内遗落有终端。本申请能够有效避免用户将终端遗落车内。

一种预警装置及系统、预警提示方法、存储介质.pdf
一种预警提示方法、装置和系统、存储介质,所述预警提示方法应用于预警装置,所述预警装置至少连接第一提示装置和第二提示装置,所述预警装置与第二提示装置设置于盲区的第一侧,所述第一提示装置设置于所述盲区的第二侧,所述预警提示方法包括:检测所述盲区的所述第一侧的第一交通状态信息,根据所述第一交通状态信息控制所述第二提示装置的提示方式;以及,发送所述第一交通状态信息给所述第一提示装置。本实施例提供的方案,预警装置连接多个提示装置,可以将本侧的交通状态信息提供给对侧的提示装置,以及,对本侧的提示装置进行控制,控制更为