
一种RV减速机故障诊断方法及系统.pdf

努力****向丝

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种RV减速机故障诊断方法及系统.pdf
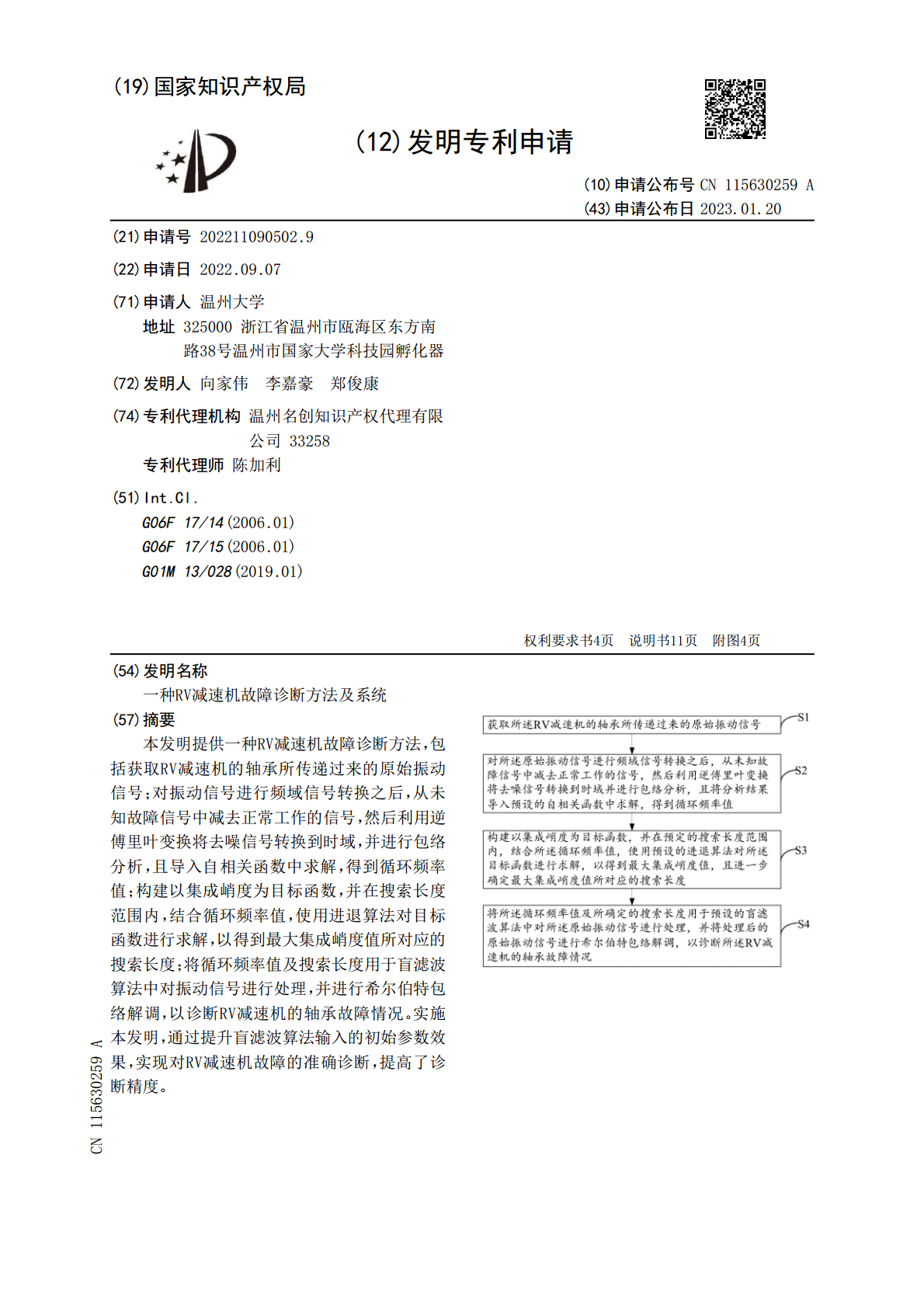
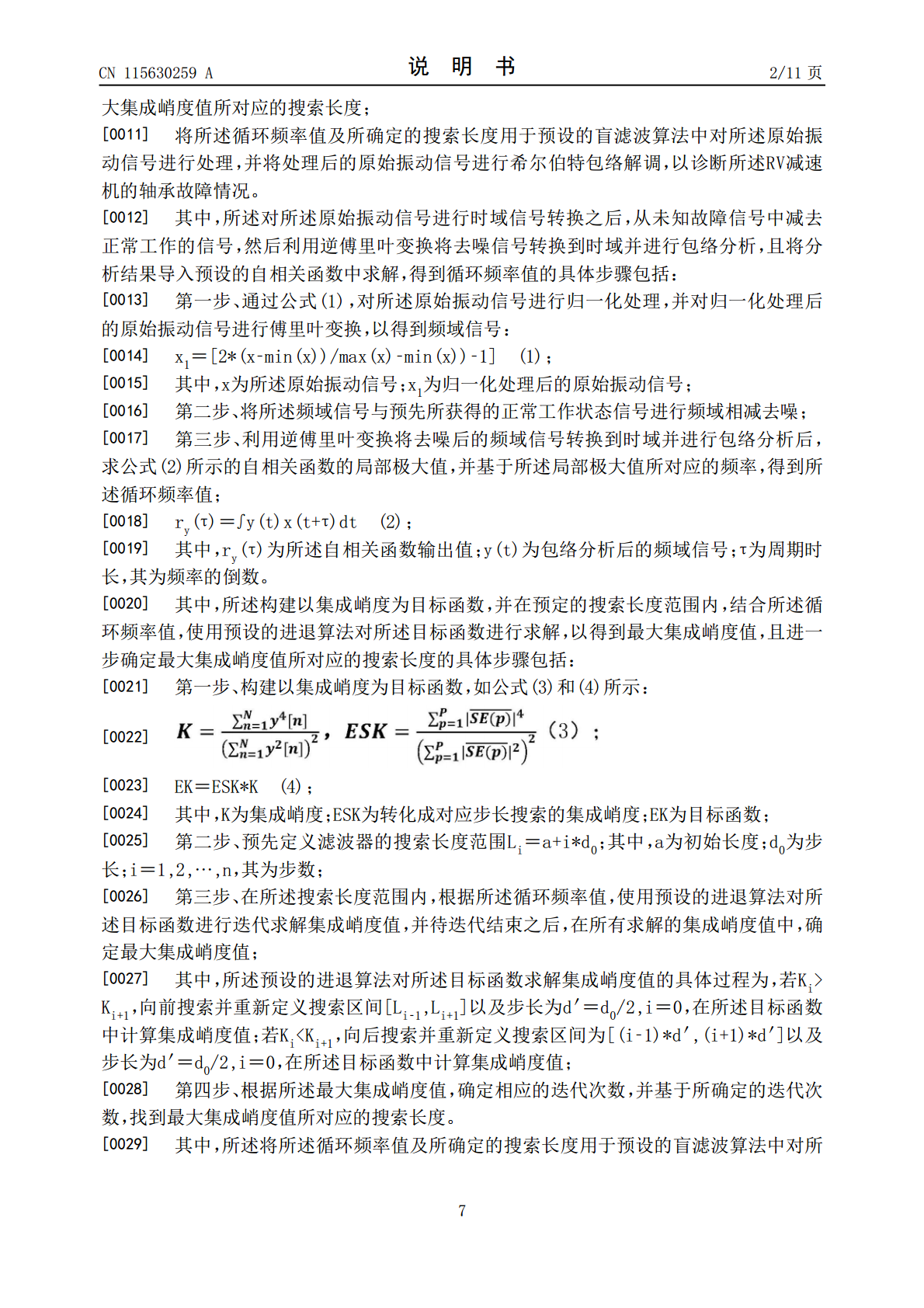
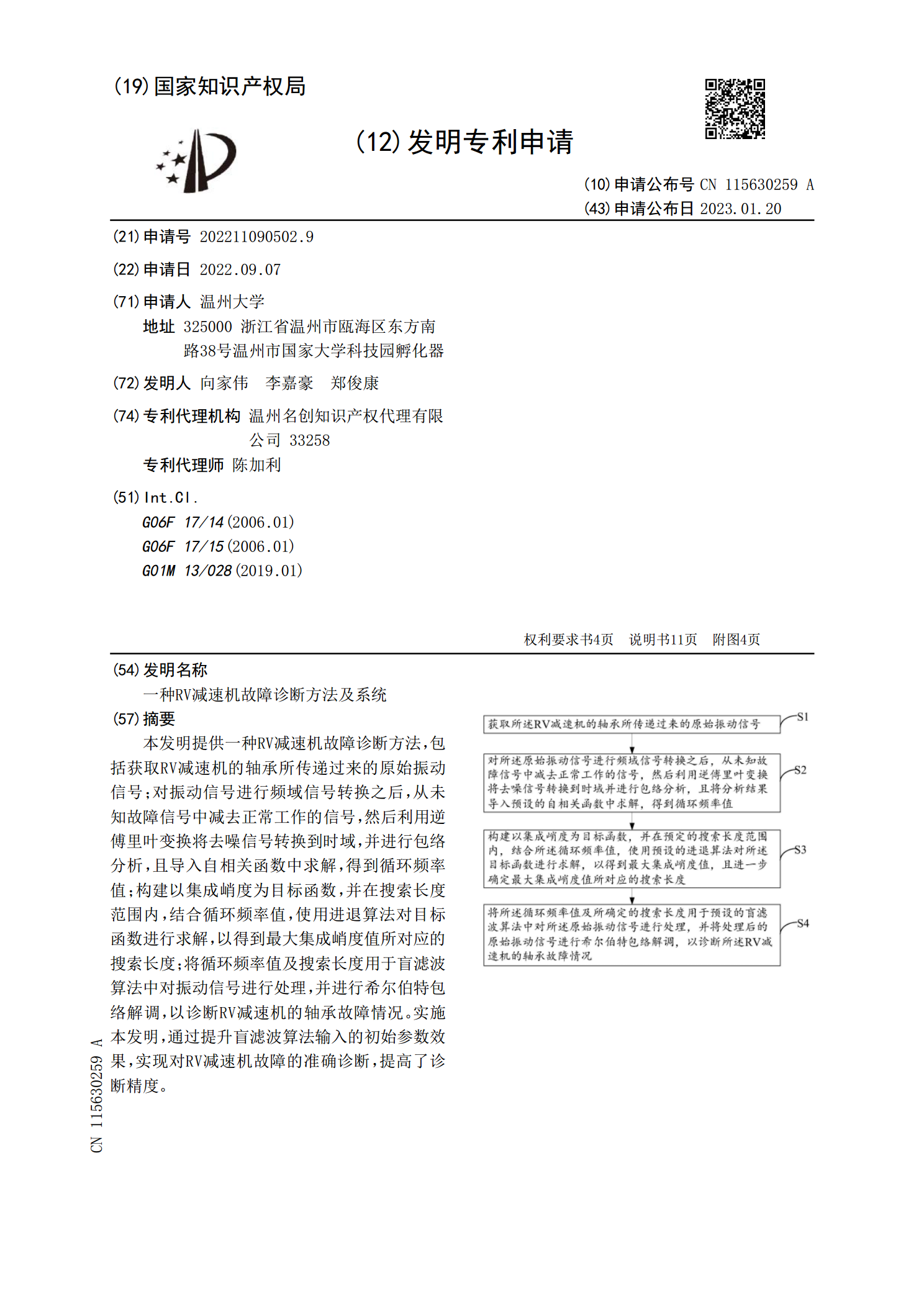
本发明提供一种RV减速机故障诊断方法,包括获取RV减速机的轴承所传递过来的原始振动信号;对振动信号进行频域信号转换之后,从未知故障信号中减去正常工作的信号,然后利用逆傅里叶变换将去噪信号转换到时域,并进行包络分析,且导入自相关函数中求解,得到循环频率值;构建以集成峭度为目标函数,并在搜索长度范围内,结合循环频率值,使用进退算法对目标函数进行求解,以得到最大集成峭度值所对应的搜索长度;将循环频率值及搜索长度用于盲滤波算法中对振动信号进行处理,并进行希尔伯特包络解调,以诊断RV减速机的轴承故障情况。实施本发明
一种RV减速机.pdf
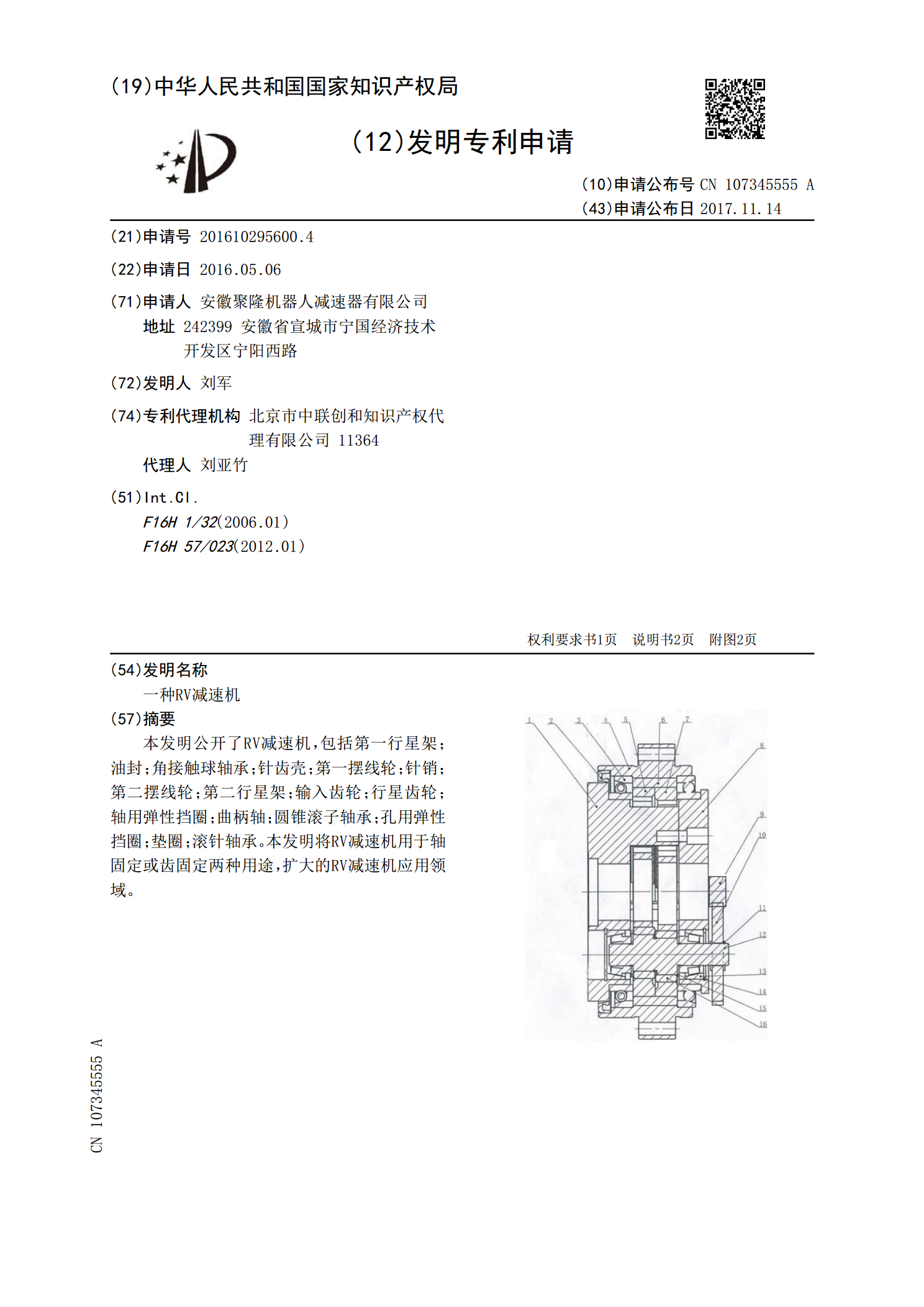
本发明公开了RV减速机,包括第一行星架;油封;角接触球轴承;针齿壳;第一摆线轮;针销;第二摆线轮;第二行星架;输入齿轮;行星齿轮;轴用弹性挡圈;曲柄轴;圆锥滚子轴承;孔用弹性挡圈;垫圈;滚针轴承。本发明将RV减速机用于轴固定或齿固定两种用途,扩大的RV减速机应用领域。
一种RV减速机.pdf
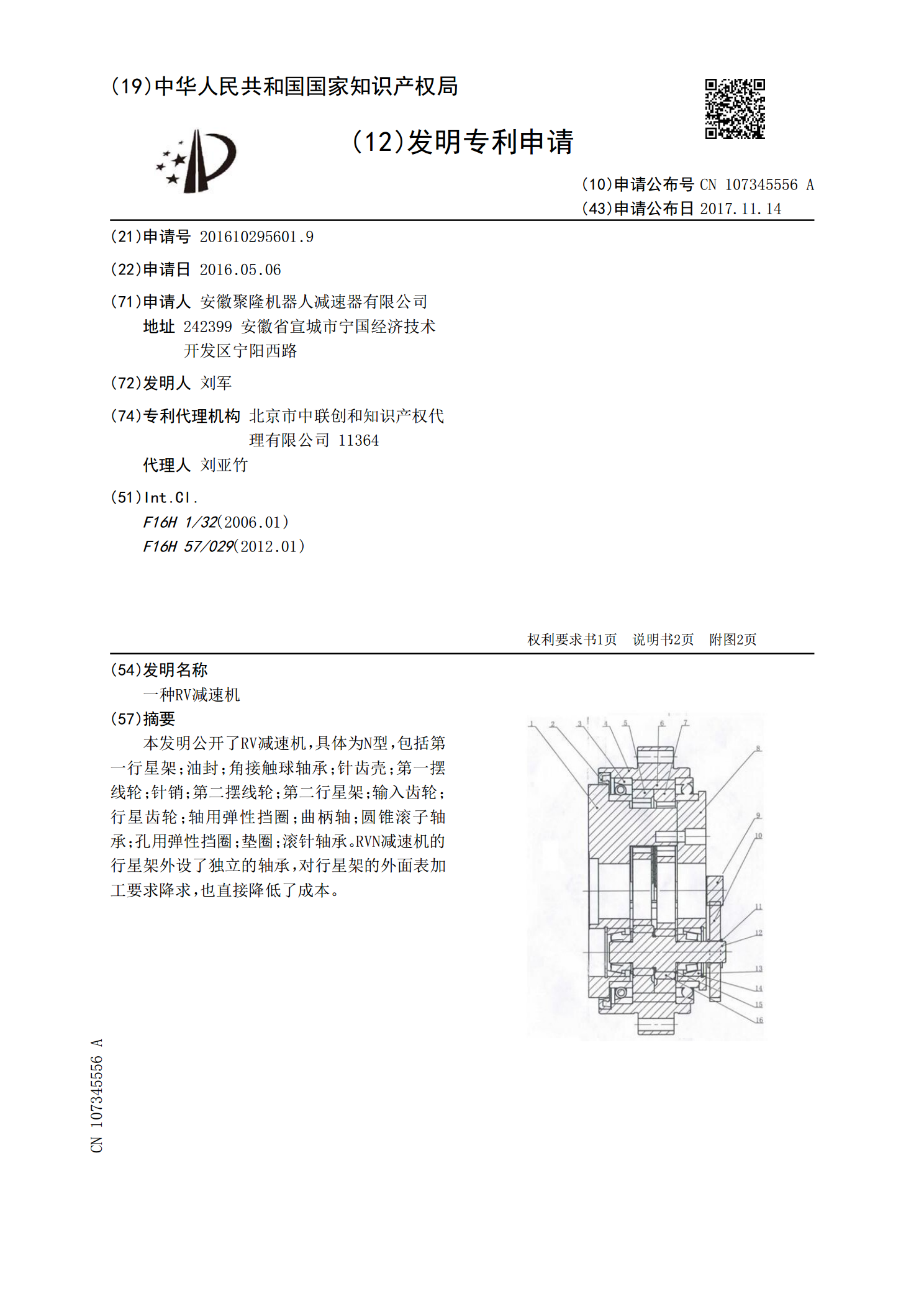
本发明公开了RV减速机,具体为N型,包括第一行星架;油封;角接触球轴承;针齿壳;第一摆线轮;针销;第二摆线轮;第二行星架;输入齿轮;行星齿轮;轴用弹性挡圈;曲柄轴;圆锥滚子轴承;孔用弹性挡圈;垫圈;滚针轴承。RVN减速机的行星架外设了独立的轴承,对行星架的外面表加工要求降求,也直接降低了成本。

RV减速机.ppt
RV减速机5RV减速机的选用本田公司ASIMO机器人1机器人焊接机器人2RV减速机结构分析输入齿轮轴:输入齿轮轴用来传递输入功率,且与渐开线行星轮互相啮合。行星轮(正齿轮):它与曲轴固联,两个或三个行星轮均匀分布在一个圆周上,起功率分流作用,即将输入功率分成几路传递给摆线针轮机构。RV齿轮:为了实现径向力的平衡,一般采用两个完全相同的摆线针轮。针齿:针齿与机架固联在一起成为针轮壳体。刚性盘与输出盘:输出盘是RV减速机与外界从动机相连接的构件,输出盘和刚性盘相连接成为一个整体,输出运动或动力。3RV减速机工
一种RV减速机偏心轴.pdf
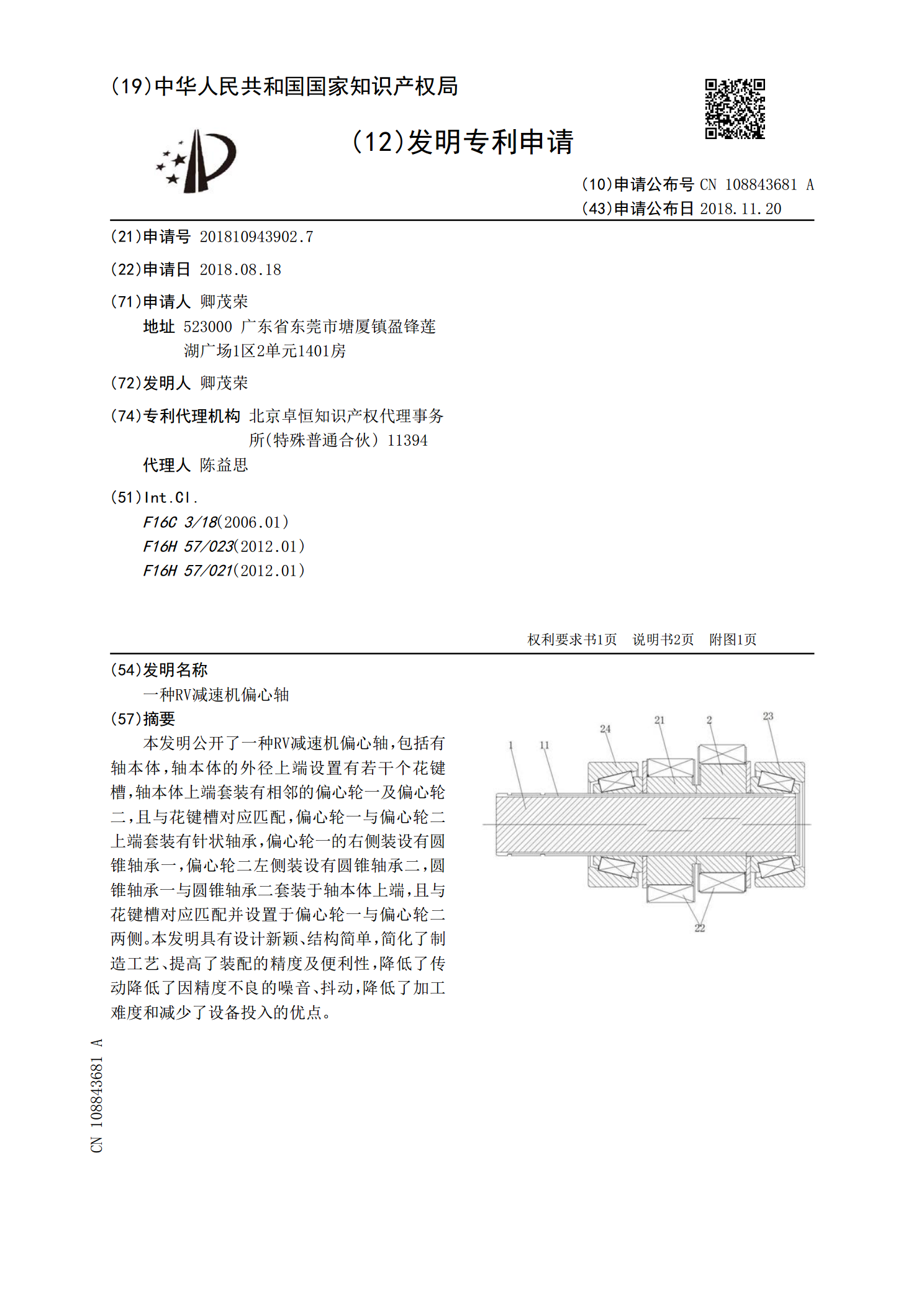
本发明公开了一种RV减速机偏心轴,包括有轴本体,轴本体的外径上端设置有若干个花键槽,轴本体上端套装有相邻的偏心轮一及偏心轮二,且与花键槽对应匹配,偏心轮一与偏心轮二上端套装有针状轴承,偏心轮一的右侧装设有圆锥轴承一,偏心轮二左侧装设有圆锥轴承二,圆锥轴承一与圆锥轴承二套装于轴本体上端,且与花键槽对应匹配并设置于偏心轮一与偏心轮二两侧。本发明具有设计新颖、结构简单,简化了制造工艺、提高了装配的精度及便利性,降低了传动降低了因精度不良的噪音、抖动,降低了加工难度和减少了设备投入的优点。