
一种关于车路协同中的路侧感知方法及其系统.pdf

一只****呀9

1/9
2/9

3/9

4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种关于车路协同中的路侧感知方法及其系统.pdf
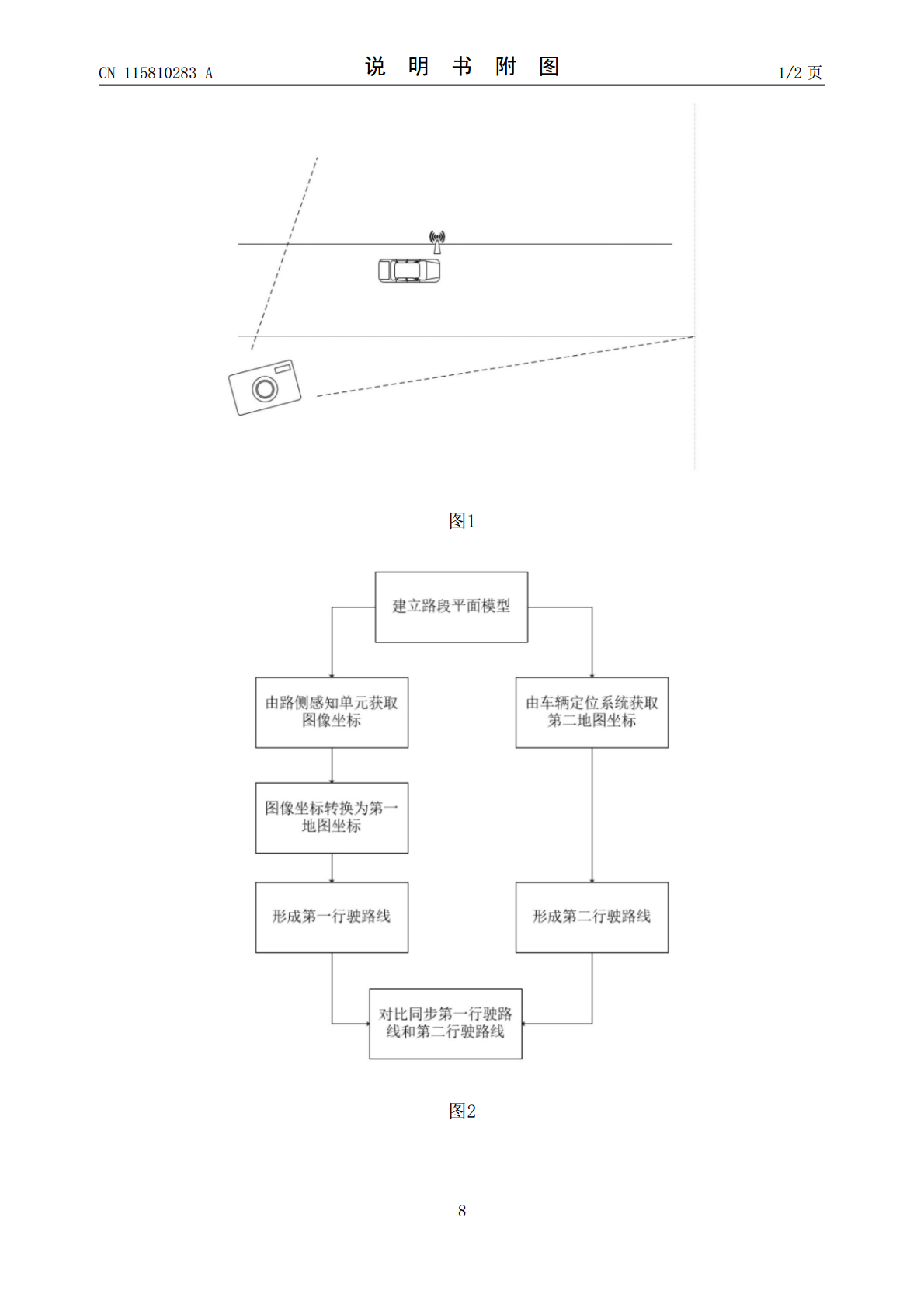
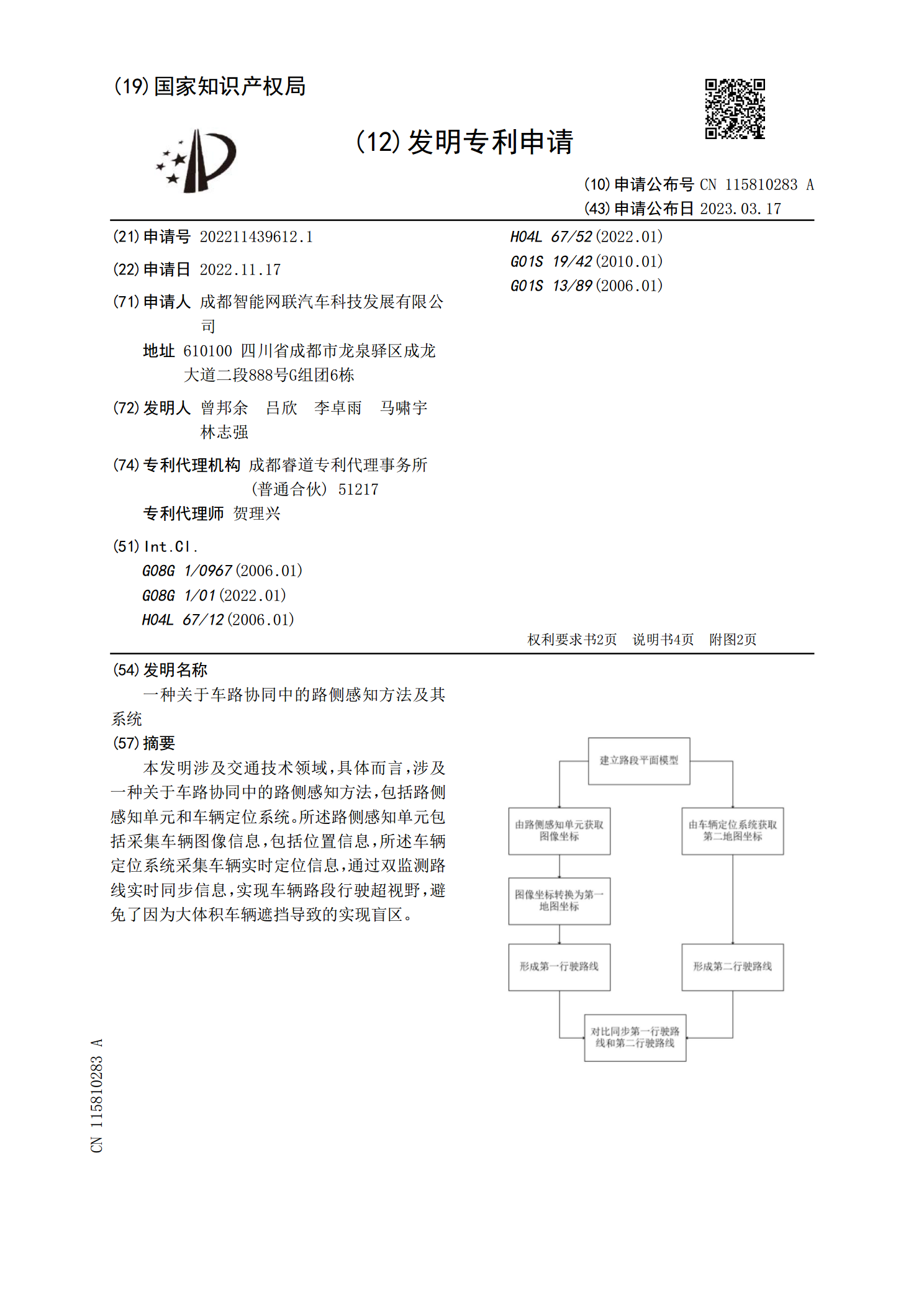
本发明涉及交通技术领域,具体而言,涉及一种关于车路协同中的路侧感知方法,包括路侧感知单元和车辆定位系统。所述路侧感知单元包括采集车辆图像信息,包括位置信息,所述车辆定位系统采集车辆实时定位信息,通过双监测路线实时同步信息,实现车辆路段行驶超视野,避免了因为大体积车辆遮挡导致的实现盲区。
一种基于车路协同的路侧感知融合系统及优化方法.pdf
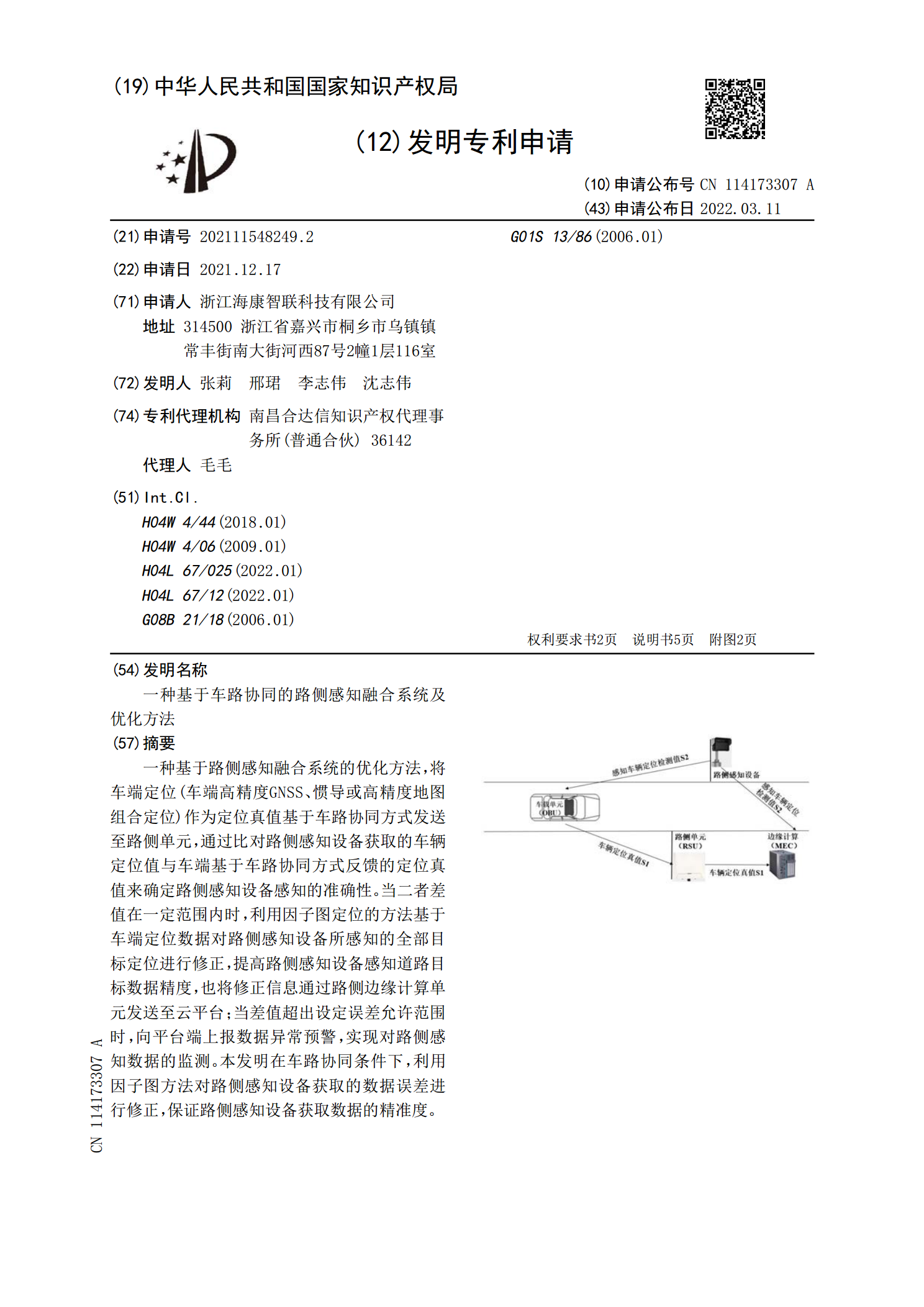
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

车路协同系统路侧感知与车端感知实时匹配的方法及系统.pdf
本发明涉及一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端RSU;步骤3:路端RSU将路端感知融合数据转换为标准感知共享数据后进行广播;步骤4:车端OBU接收路端RSU广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,与现有技术相比,本发明具有能够实时
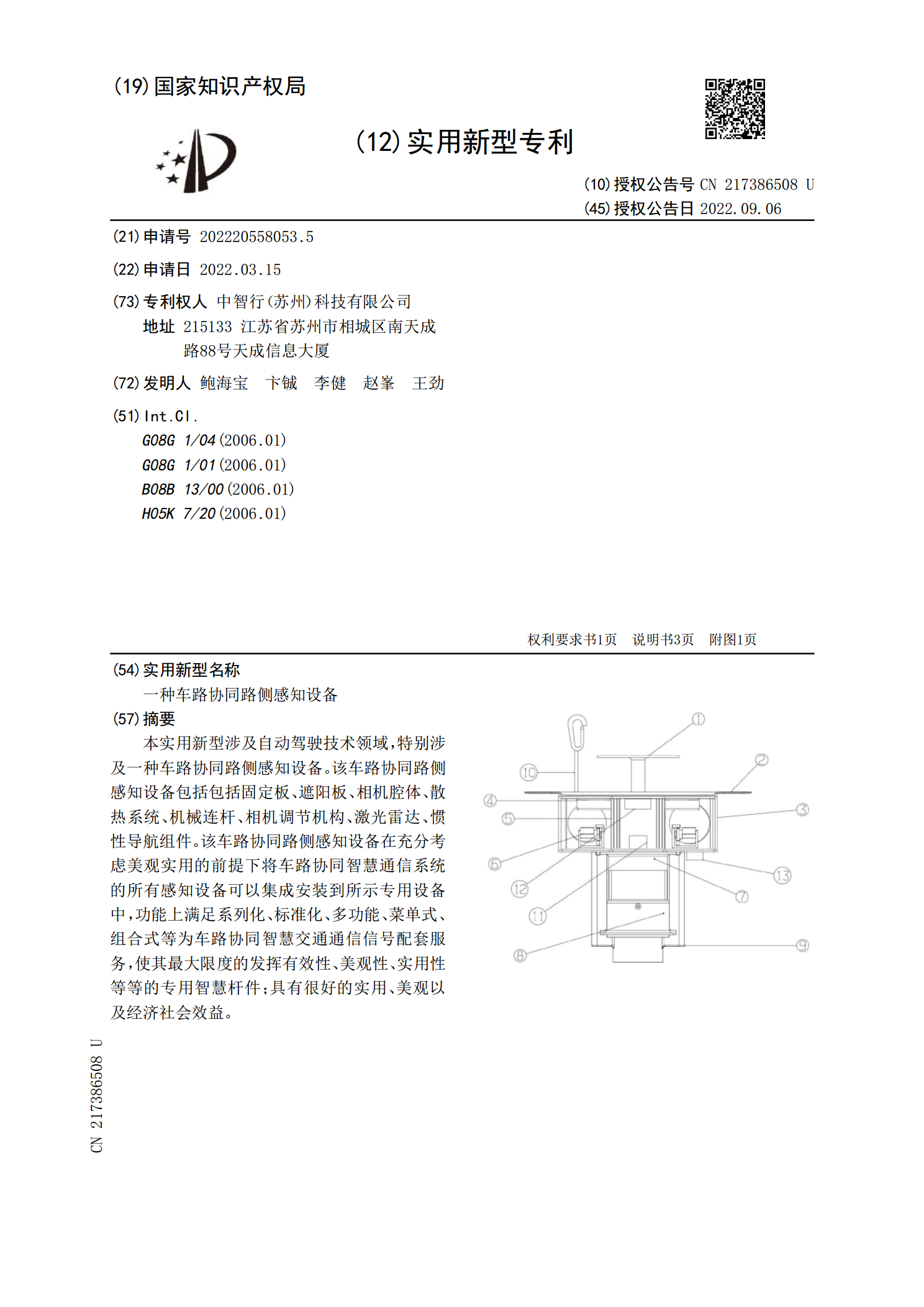
一种车路协同路侧感知设备.pdf
本实用新型涉及自动驾驶技术领域,特别涉及一种车路协同路侧感知设备。该车路协同路侧感知设备包括包括固定板、遮阳板、相机腔体、散热系统、机械连杆、相机调节机构、激光雷达、惯性导航组件。该车路协同路侧感知设备在充分考虑美观实用的前提下将车路协同智慧通信系统的所有感知设备可以集成安装到所示专用设备中,功能上满足系列化、标准化、多功能、菜单式、组合式等为车路协同智慧交通通信信号配套服务,使其最大限度的发挥有效性、美观性、实用性等等的专用智慧杆件;具有很好的实用、美观以及经济社会效益。
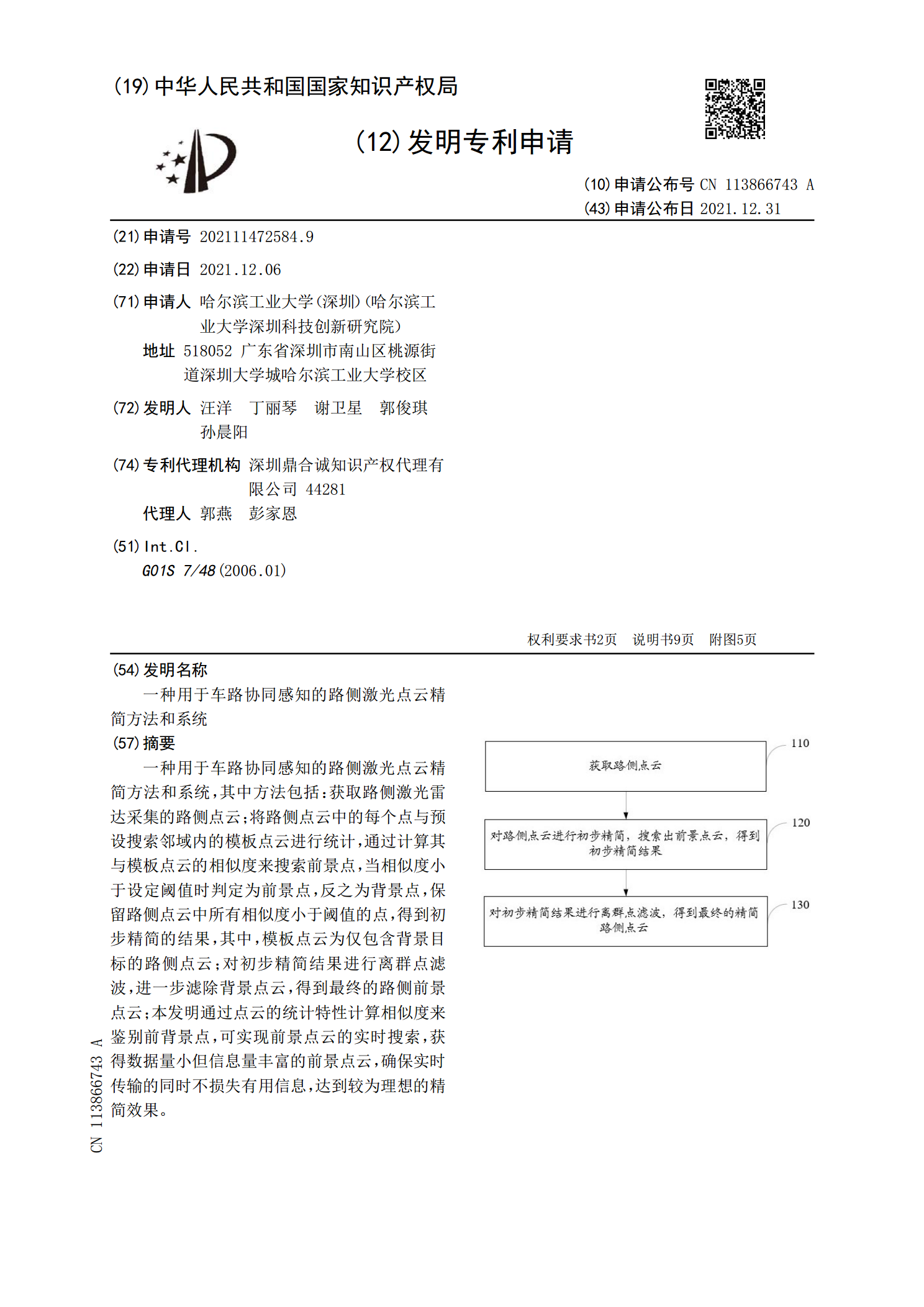
一种用于车路协同感知的路侧激光点云精简方法和系统.pdf
一种用于车路协同感知的路侧激光点云精简方法和系统,其中方法包括:获取路侧激光雷达采集的路侧点云;将路侧点云中的每个点与预设搜索邻域内的模板点云进行统计,通过计算其与模板点云的相似度来搜索前景点,当相似度小于设定阈值时判定为前景点,反之为背景点,保留路侧点云中所有相似度小于阈值的点,得到初步精简的结果,其中,模板点云为仅包含背景目标的路侧点云;对初步精简结果进行离群点滤波,进一步滤除背景点云,得到最终的路侧前景点云;本发明通过点云的统计特性计算相似度来鉴别前背景点,可实现前景点云的实时搜索,获得数据量小但信