
一种建筑工程塔机吊钩可视化控制系统.pdf

fa****楠吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种建筑工程塔机吊钩可视化控制系统.pdf
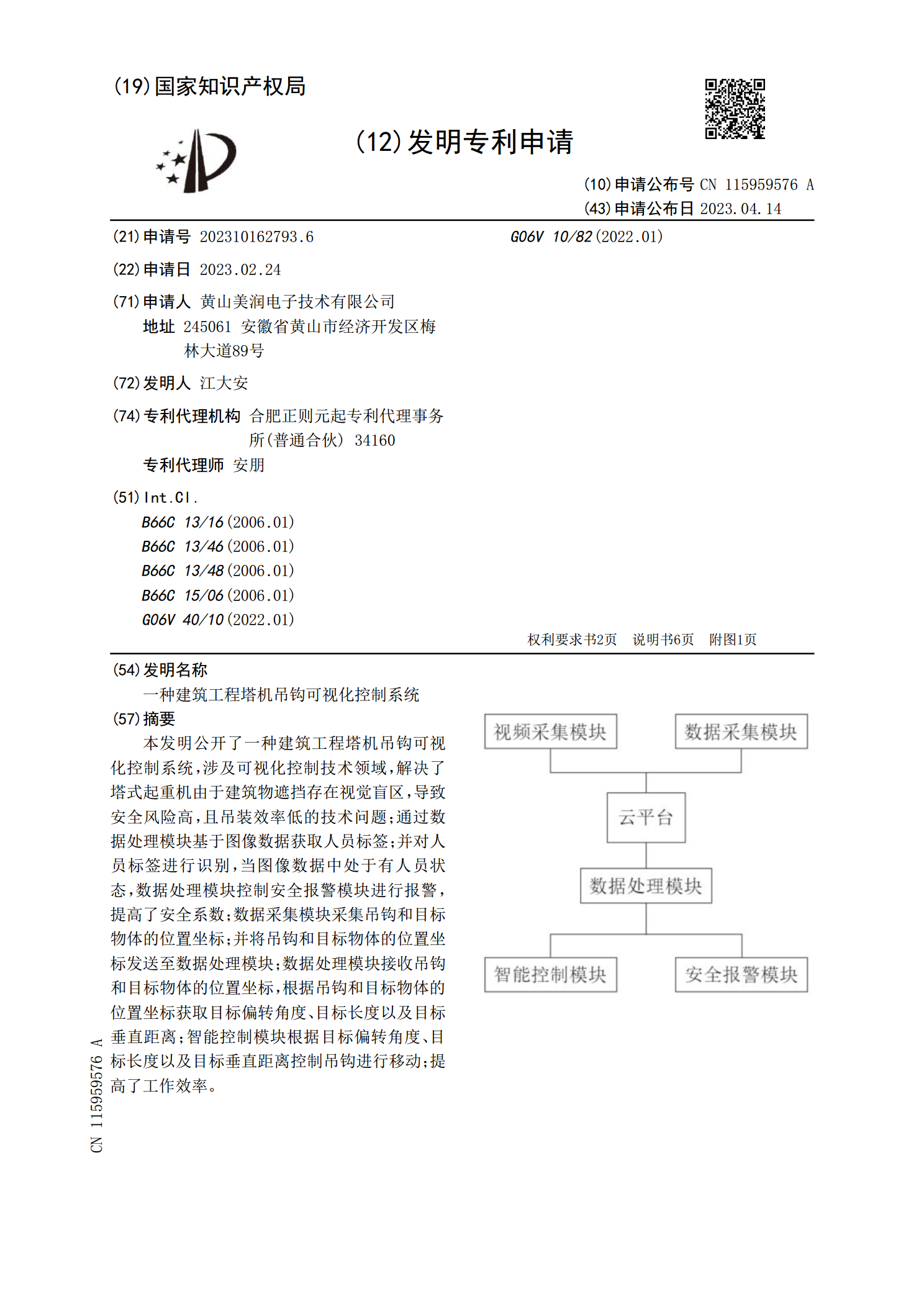
本发明公开了一种建筑工程塔机吊钩可视化控制系统,涉及可视化控制技术领域,解决了塔式起重机由于建筑物遮挡存在视觉盲区,导致安全风险高,且吊装效率低的技术问题;通过数据处理模块基于图像数据获取人员标签;并对人员标签进行识别,当图像数据中处于有人员状态,数据处理模块控制安全报警模块进行报警,提高了安全系数;数据采集模块采集吊钩和目标物体的位置坐标;并将吊钩和目标物体的位置坐标发送至数据处理模块;数据处理模块接收吊钩和目标物体的位置坐标,根据吊钩和目标物体的位置坐标获取目标偏转角度、目标长度以及目标垂直距离;智能

一种基于光电绝对值编码器的塔机吊钩可视化设备.pdf
本发明涉及可视化设备技术领域,具体是一种基于光电绝对值编码器的塔机吊钩可视化设备,包括驱动电机、光电绝对值编码器、无线传输设备和壳体;所述光电绝对值编码器安装在驱动电机上,所述壳体上安装有显示器,壳体的内部安装有计数设备和输出设备,计数设备、输出设备和显示器依次电性连接。该基于光电绝对值编码器的塔机吊钩可视化设备通过光电绝对值编码器检测驱动电机转动的角度数据,通过无线传输设备将角度数据传输给计数设备,通过计数设备计算出吊钩的位置,并将位置信息发送给输出设备,输出设备将位置信息输出到显示器上显示,使得司机操
一种基于GNSS的塔机吊钩定位方法.pdf
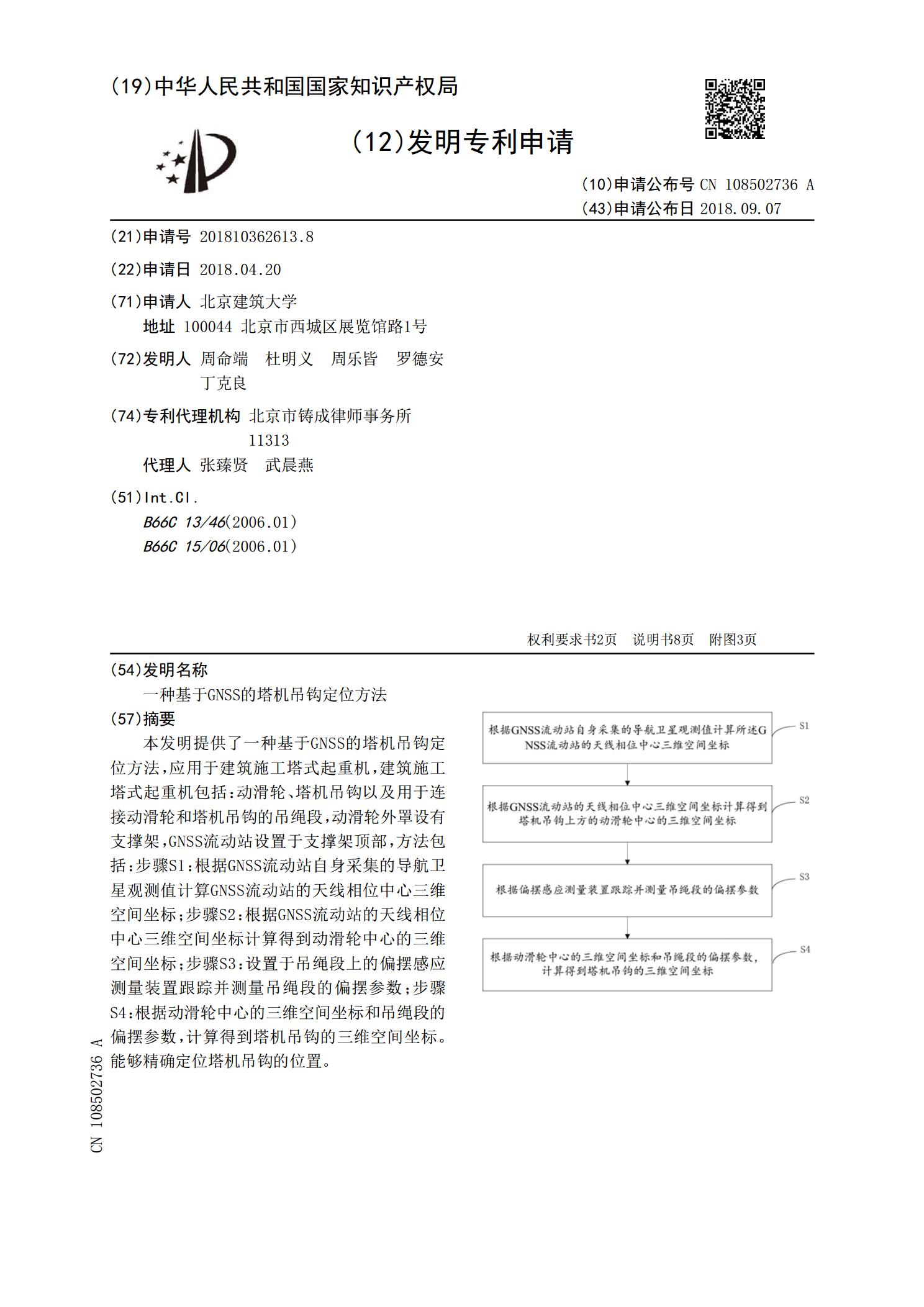
本发明提供了一种基于GNSS的塔机吊钩定位方法,应用于建筑施工塔式起重机,建筑施工塔式起重机包括:动滑轮、塔机吊钩以及用于连接动滑轮和塔机吊钩的吊绳段,动滑轮外罩设有支撑架,GNSS流动站设置于支撑架顶部,方法包括:步骤S1:根据GNSS流动站自身采集的导航卫星观测值计算GNSS流动站的天线相位中心三维空间坐标;步骤S2:根据GNSS流动站的天线相位中心三维空间坐标计算得到动滑轮中心的三维空间坐标;步骤S3:设置于吊绳段上的偏摆感应测量装置跟踪并测量吊绳段的偏摆参数;步骤S4:根据动滑轮中心的三维空间坐标
一种塔机吊钩视频引导系统及其应用.pdf
本发明属于智能控制领域,具体设计一种塔机吊钩视频引导系统及其应用;一种塔机吊钩视频引导系统,包括主机、摄像头、充电装置、电源装置、网络装置、信号接收模块、高度传感器、存储模块;本发明中的塔机吊钩视频引导系统不但解决了盲区、安全、效率问题,还能够保存吊钩的位置和吊钩周围情况的视频,并能够连接网络把实时和历史视频传输到任何地方。本发明中的塔机吊钩视频引导系统具有可视化设置,参数设置方便直观,进行可视化数据的显示,可直观了解设备运行及电量状况;本发明中的塔机吊钩视频引导系统中的存储模块中设置存储硬盘,可以保存历

塔机吊钩悬停控制技术研究.docx
塔机吊钩悬停控制技术研究随着建筑业的飞速发展,塔机已经成为建筑工地上必不可少的设备之一。塔机具有承载能力大、灵活性强的特点,可以在建筑工地承担起多种工作,如起吊、装卸、搬运等。塔机在使用过程中,钩具悬停控制技术是关键环节之一。本文将重点介绍塔机吊钩悬停控制技术研究。一、钩具悬停控制的意义在建筑工地上,塔机的主要工作是在高空进行吊装作业。如果钩具失控,很容易造成安全事故,甚至是人身伤亡事件的发生。因此,建筑企业对塔机吊钩悬停控制技术的安全性要求极为严格。钩具悬停控制不仅是塔机工程的安全保障措施,还可以提高施