
一种基于GNSS的塔机吊钩定位方法.pdf

灵波****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于GNSS的塔机吊钩定位方法.pdf
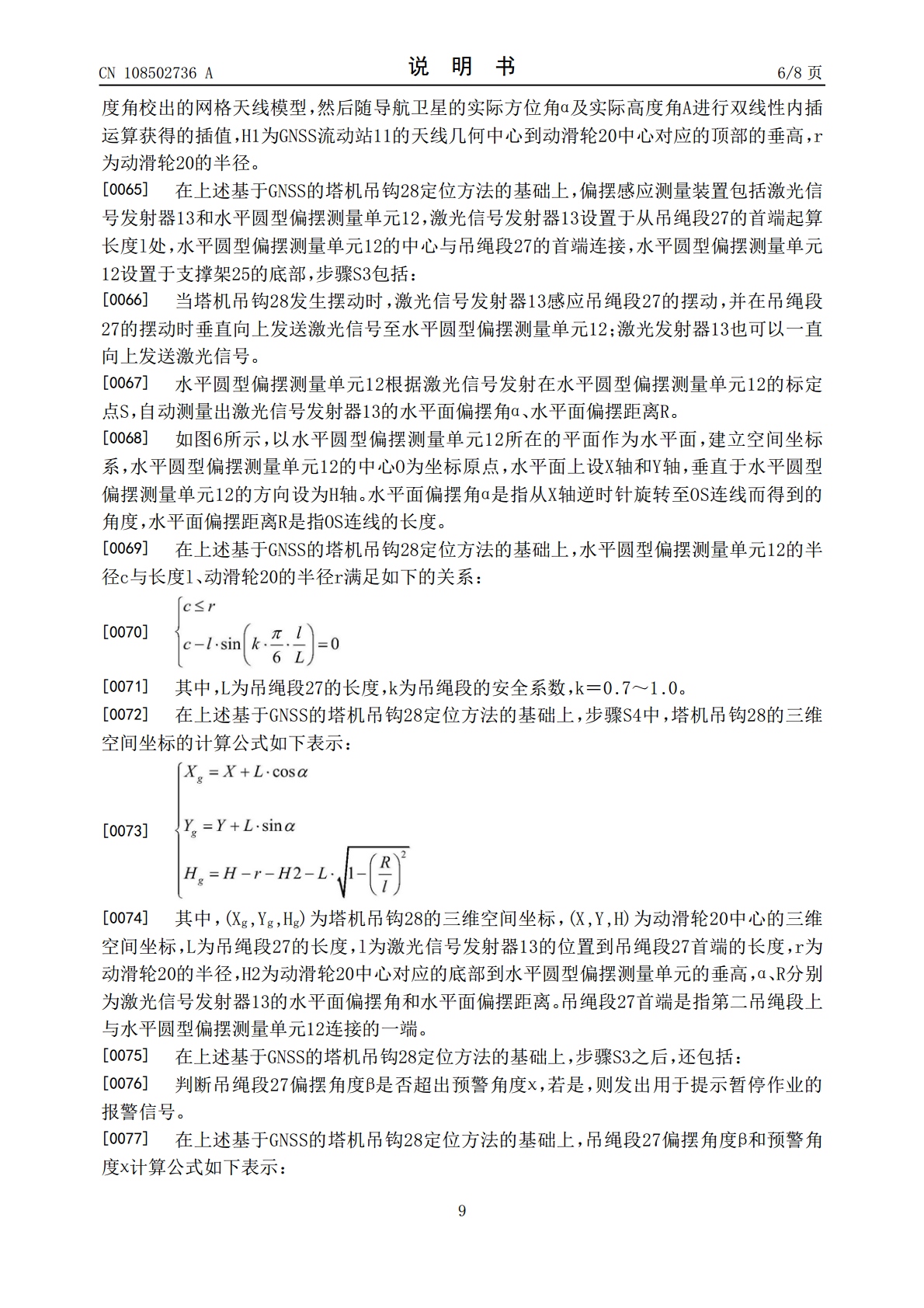
本发明提供了一种基于GNSS的塔机吊钩定位方法,应用于建筑施工塔式起重机,建筑施工塔式起重机包括:动滑轮、塔机吊钩以及用于连接动滑轮和塔机吊钩的吊绳段,动滑轮外罩设有支撑架,GNSS流动站设置于支撑架顶部,方法包括:步骤S1:根据GNSS流动站自身采集的导航卫星观测值计算GNSS流动站的天线相位中心三维空间坐标;步骤S2:根据GNSS流动站的天线相位中心三维空间坐标计算得到动滑轮中心的三维空间坐标;步骤S3:设置于吊绳段上的偏摆感应测量装置跟踪并测量吊绳段的偏摆参数;步骤S4:根据动滑轮中心的三维空间坐标

GNSS定位系统在智能塔机的应用.docx
GNSS定位系统在智能塔机的应用GNSS是全球导航卫星系统(GlobalNavigationSatelliteSystem)的缩写,它是一种基于卫星和地面设备的定位导航系统。智能塔机是一种现代化的建筑设备,用于在建筑工地上进行高效的物料搬运和施工作业。本论文将探讨GNSS在智能塔机中的应用,包括其原理、技术特点以及在塔机定位、作业控制和安全监控方面的作用。首先,我们将介绍GNSS定位系统的原理和技术特点。GNSS系统由一组卫星,地面控制站和用户接收器组成。卫星通过发射信号和定时器提供准确的时间和位置信息。

基于多定位方法的GNSS软件接收机.ppt
第十二届挑战杯作品基于多定位方法的GNSS软件接收机作品简介背景介绍基本的定位原理是:以导航卫星和用户接收天线之间的距离观测量为基准,根据已知的卫星瞬时坐标,来确定用户接收天线所对应的位置。GPS软件接收机原理伪距定位原理传统的伪距定位算法:GPS卫星发射的测距码信号从卫星发射经t时间后,到达接收机天线,用此信号传播时间乘以电磁波在真空中的速度c,就是卫星至接收机的空间几何距离。实际上,由于传播时间中包含有卫星时钟与接收机时钟不同步的误差,大气传播延迟等,由此求得的距离并非真正的站星几何距离,因此被称为“

精确定位吊钩位置的GNSS双吊绳段建筑施工塔吊机.pdf
本发明公开了一种精确定位吊钩位置的GNSS双吊绳段建筑施工塔吊机,包括塔臂、第一吊绳段、第二吊绳段、位于第一吊绳段和第二吊绳段之间的动滑轮,和在第二吊绳段末端的吊钩,建筑施工塔吊机与一吊装定点放样辅助系统配合,该吊装定点放样辅助系统包括GNSS基准站和监控装置,建筑施工塔吊机还包括:设置在塔臂上的风速测量装置和风加速度测量装置,用于测量塔臂处的风速和风的加速度;设置在动滑轮上的GNSS流动站;GNSS流动站从GNSS基准站接收导航卫星差分改正信号,获得自身的平面坐标信息和高程信息,并将平面坐标信息和高程信
塔机吊钩视觉系统及其安装方法.pdf
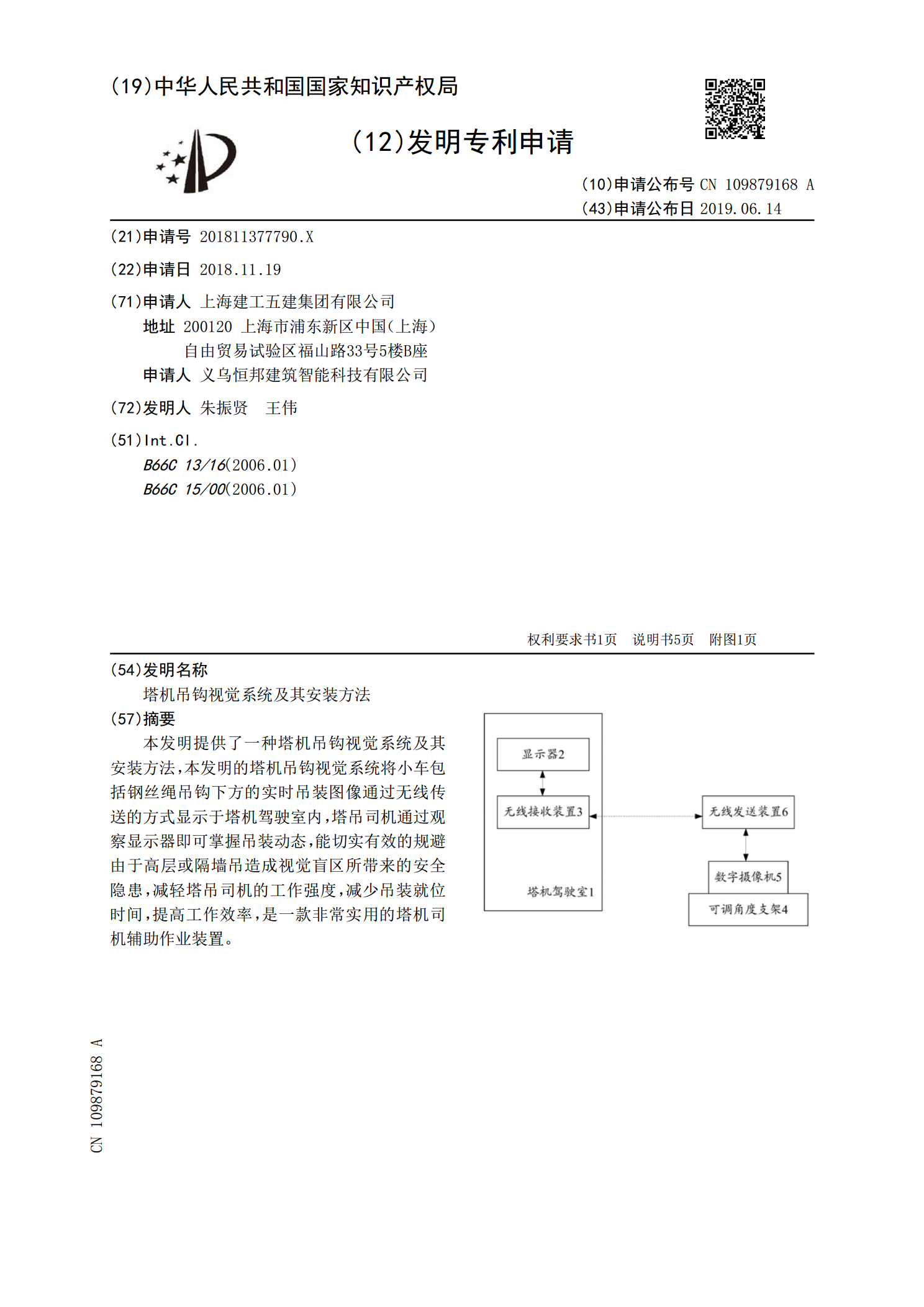
本发明提供了一种塔机吊钩视觉系统及其安装方法,本发明的塔机吊钩视觉系统将小车包括钢丝绳吊钩下方的实时吊装图像通过无线传送的方式显示于塔机驾驶室内,塔吊司机通过观察显示器即可掌握吊装动态,能切实有效的规避由于高层或隔墙吊造成视觉盲区所带来的安全隐患,减轻塔吊司机的工作强度,减少吊装就位时间,提高工作效率,是一款非常实用的塔机司机辅助作业装置。