
一种具有转向功能的简易的轮式机器人行走平台.pdf

子璇****君淑


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有转向功能的简易的轮式机器人行走平台.pdf
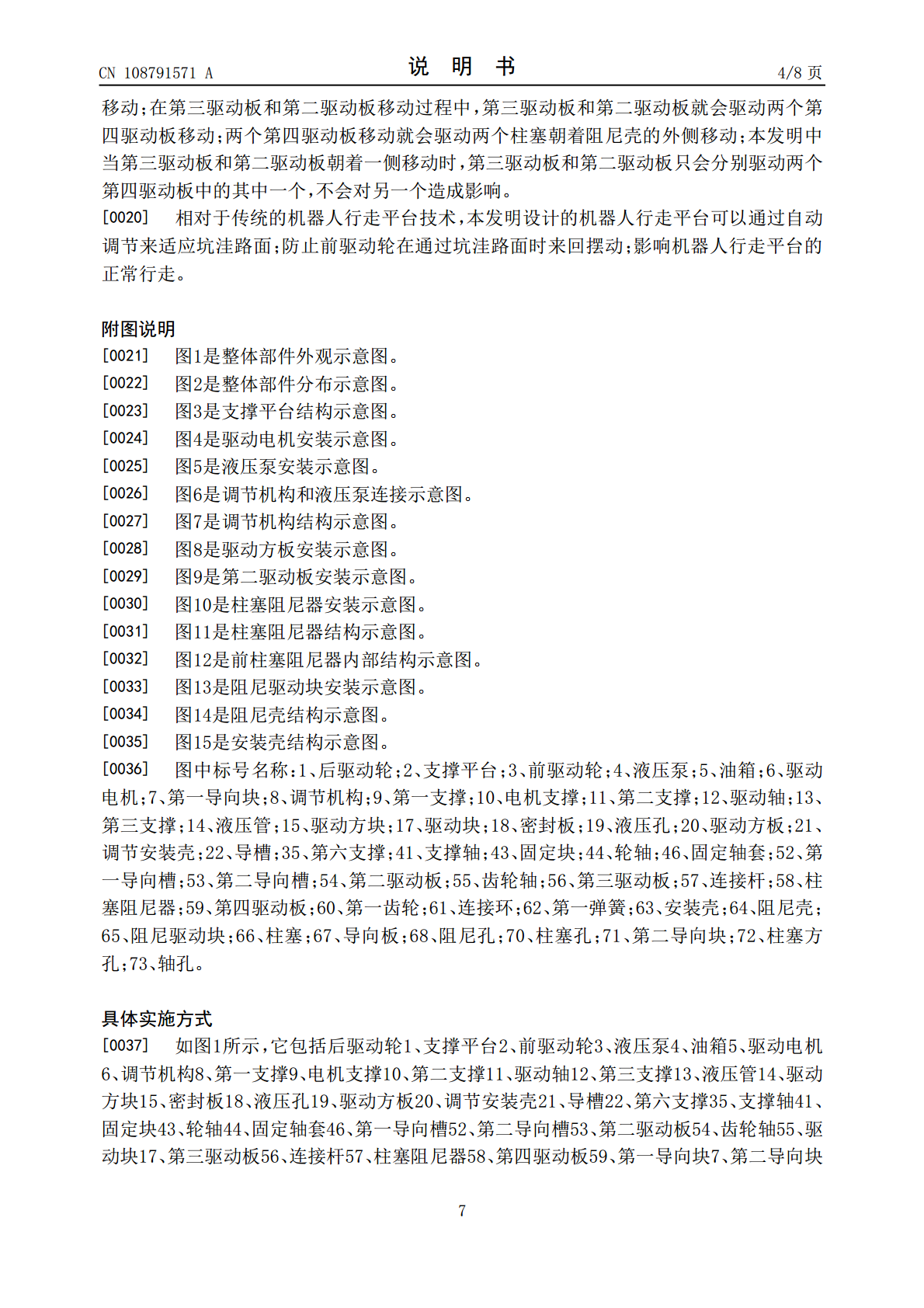
本发明属于机器人行走平台技术领域,尤其涉及一种具有转向功能的简易的轮式机器人行走平台,它包括后驱动轮、支撑平台、前驱动轮、驱动电机,使用本发明设计的机器人行走平台时,在正常行驶过程中,两个驱动电机工作,两个驱动电就会过两个后驱动轮驱动机器人平台行走;在直线行走过程中,当机器人通过坑洼路面时,通过柱塞阻尼器减小前驱动轮的摆动;使得机器人可以顺利通过坑洼路面。当机器人转向时,通过控制两个驱动电机的输出转速控制两个后驱动轮的转速;通过两个后驱动轮的转速差实现机器人的转向;此时柱塞阻尼器失去了对支撑轴的阻尼作用,
一种用于非辅助路面简易的轮式机器人行走平台.pdf
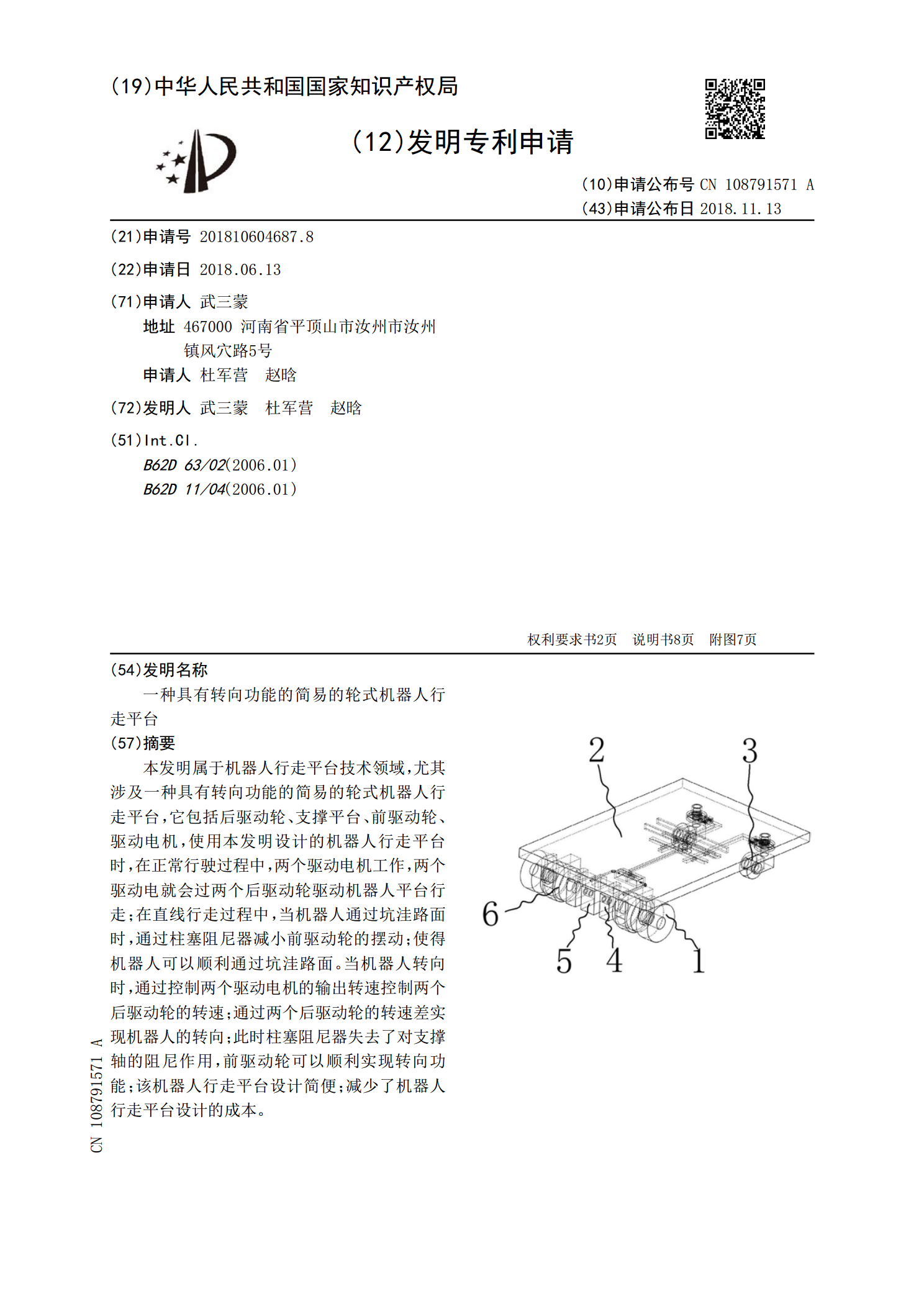
本发明属于机器人行走平台技术领域,尤其涉及一种用于非辅助路面简易的轮式机器人行走平台,它包括后驱动轮、支撑平台、前驱动轮、驱动电机、调节电机,当使用本发明设计的机器人行走平台时,在正常行驶过程中,两个驱动电机工作,两个驱动电就会过两个后驱动轮驱动机器人平台行走;在直线行走过程中,当机器人转向时,通过控制两个驱动电机的输出转速控制两个后驱动轮的转速;通过两个后驱动轮的转速差实现机器人的转向;当机器人通过坑洼路面时,通过两个板簧来缓冲前驱动轮的摆动;使得机器人可以顺利通过坑洼路面。该机器人行走平台设计简便;减
一种机器人使用的轮式四驱行走平台.pdf
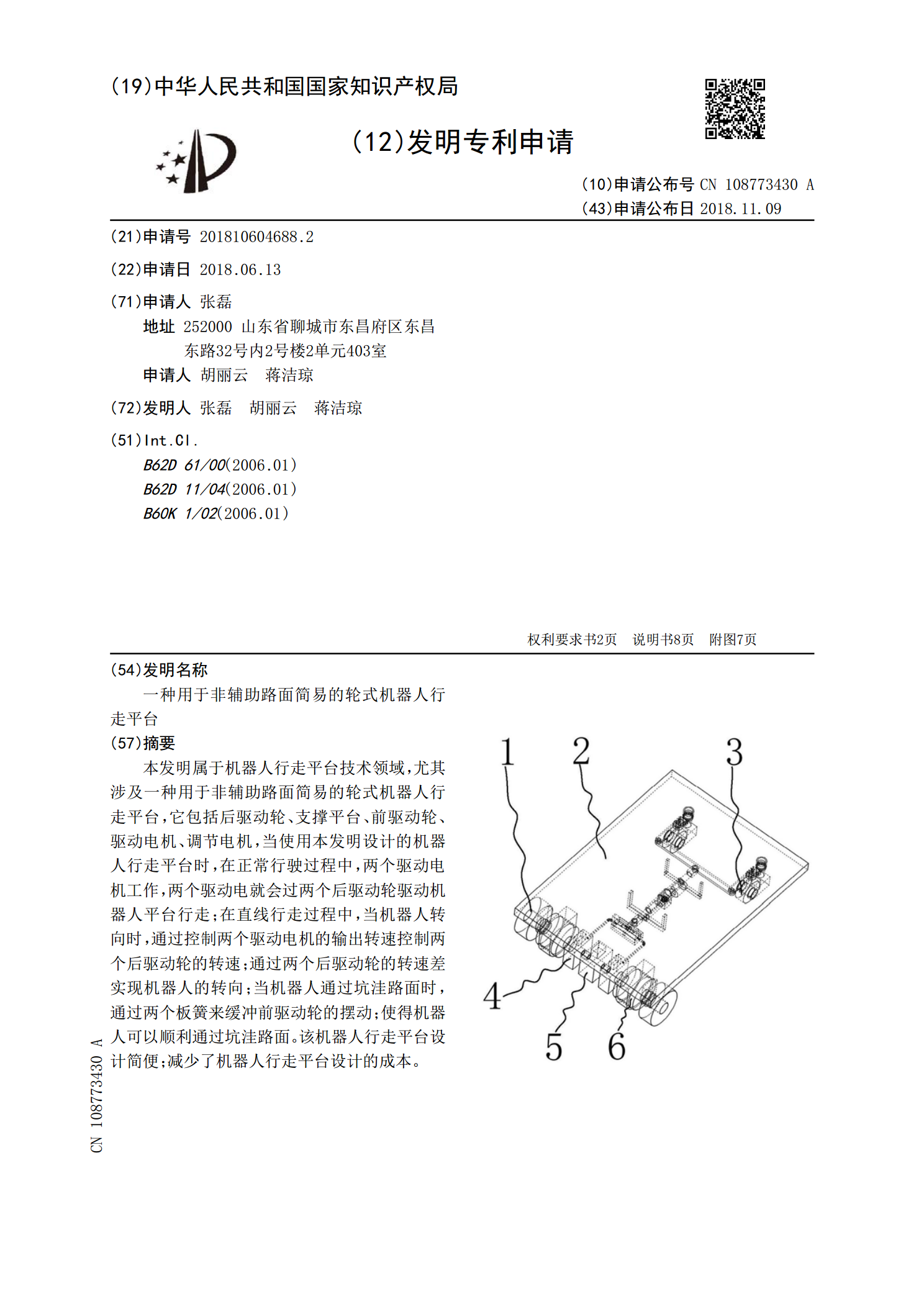
本发明属于机器人技术领域,尤其涉及一种机器人使用的轮式四驱行走平台,它包括调节电机、驱动电机、调节驱动机构、差速器、前驱、后驱,机器人控制调节电机的输入轴转动;调节电机上的输入轴转动带动调节传动轴转动;调节传动轴转动就会带动第一锥齿轮转动;第一轴套转动就会带动第三锥齿轮转动;从而带动第四锥齿轮转动;第二轴套动就会带动第七锥齿轮转动;第三连接轴和第四连接轴转动均会带动第十二锥齿轮和第十三锥齿轮转动;由于第十二锥齿轮和第十三锥齿轮的转动方向与第十锥齿轮和第十一锥齿轮中的其中一个转动方向相同,另一个转动方向相反
一种可变形具有自主导航及行走功能的轮式双足机器人.pdf
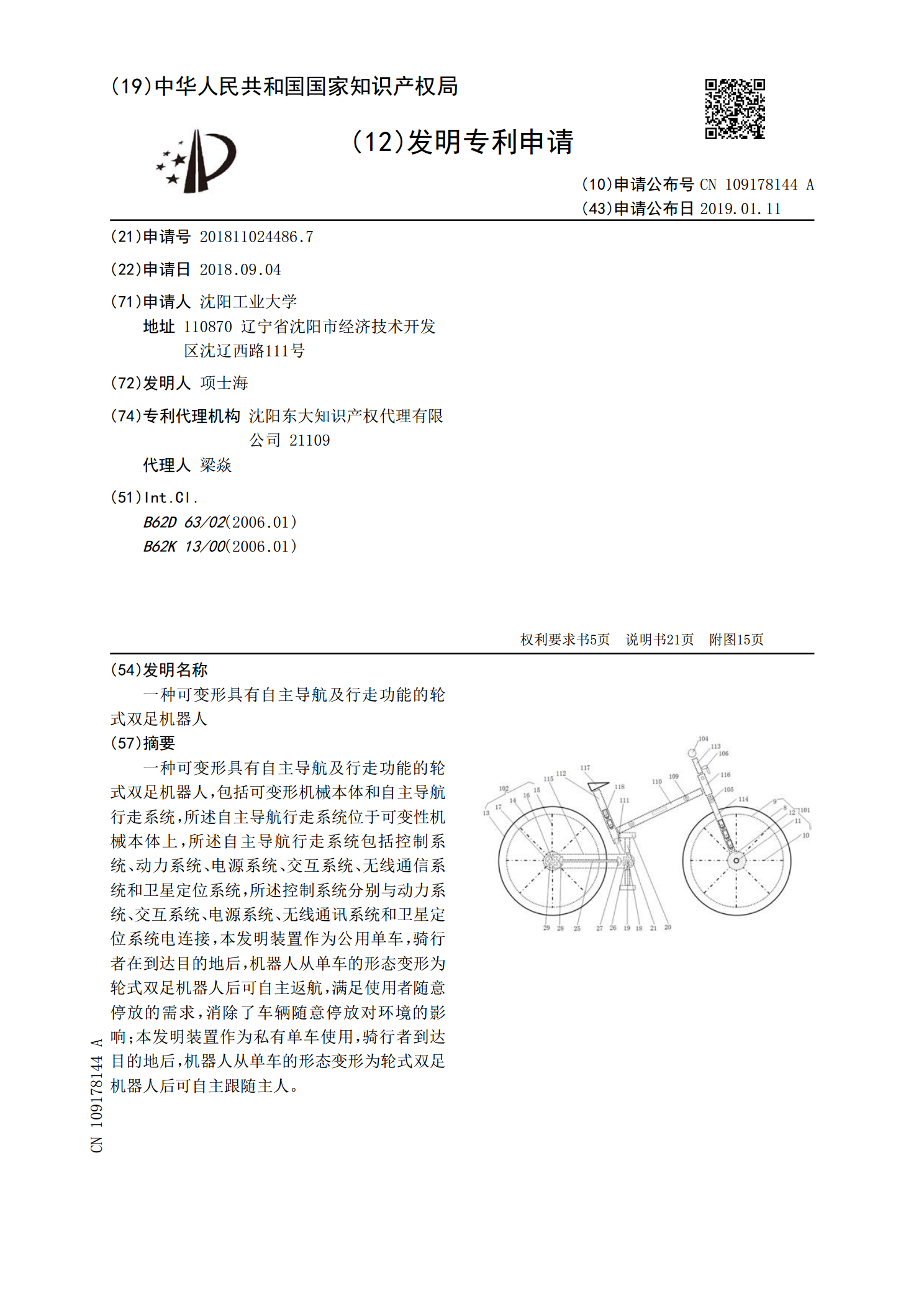
一种可变形具有自主导航及行走功能的轮式双足机器人,包括可变形机械本体和自主导航行走系统,所述自主导航行走系统位于可变性机械本体上,所述自主导航行走系统包括控制系统、动力系统、电源系统、交互系统、无线通信系统和卫星定位系统,所述控制系统分别与动力系统、交互系统、电源系统、无线通讯系统和卫星定位系统电连接,本发明装置作为公用单车,骑行者在到达目的地后,机器人从单车的形态变形为轮式双足机器人后可自主返航,满足使用者随意停放的需求,消除了车辆随意停放对环境的影响;本发明装置作为私有单车使用,骑行者到达目的地后,机

一种机器人使用的轮式双驱行走平台.pdf
本发明属于机器人技术领域,尤其涉及一种机器人使用的轮式双驱行走平台,它包括调节电机、调节伸缩传动轴、第一传动轴、第二传动轴,机器人控制调节电机的输入轴转动;调节伸缩传动轴转动就会带动第一锥齿轮转动;第一锥齿轮转动就会带动第二锥齿轮转动;第三锥齿轮转动就会带动第四锥齿轮和第六锥齿轮转动;第五锥齿轮转动带动第二轴套转动;第七锥齿轮转动就会带动第八锥齿轮和第九锥齿轮转动;即第十一锥齿轮和第十二锥齿轮的转动就会使得第十锥齿轮和第十三锥齿轮中其中一个转动速度变快,另一个转动速度变慢;即第一传动轴和第二传动轴的转动速