
智能机器人用激光切割辅助装置.pdf

韶敏****ab

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能机器人用激光切割辅助装置.pdf
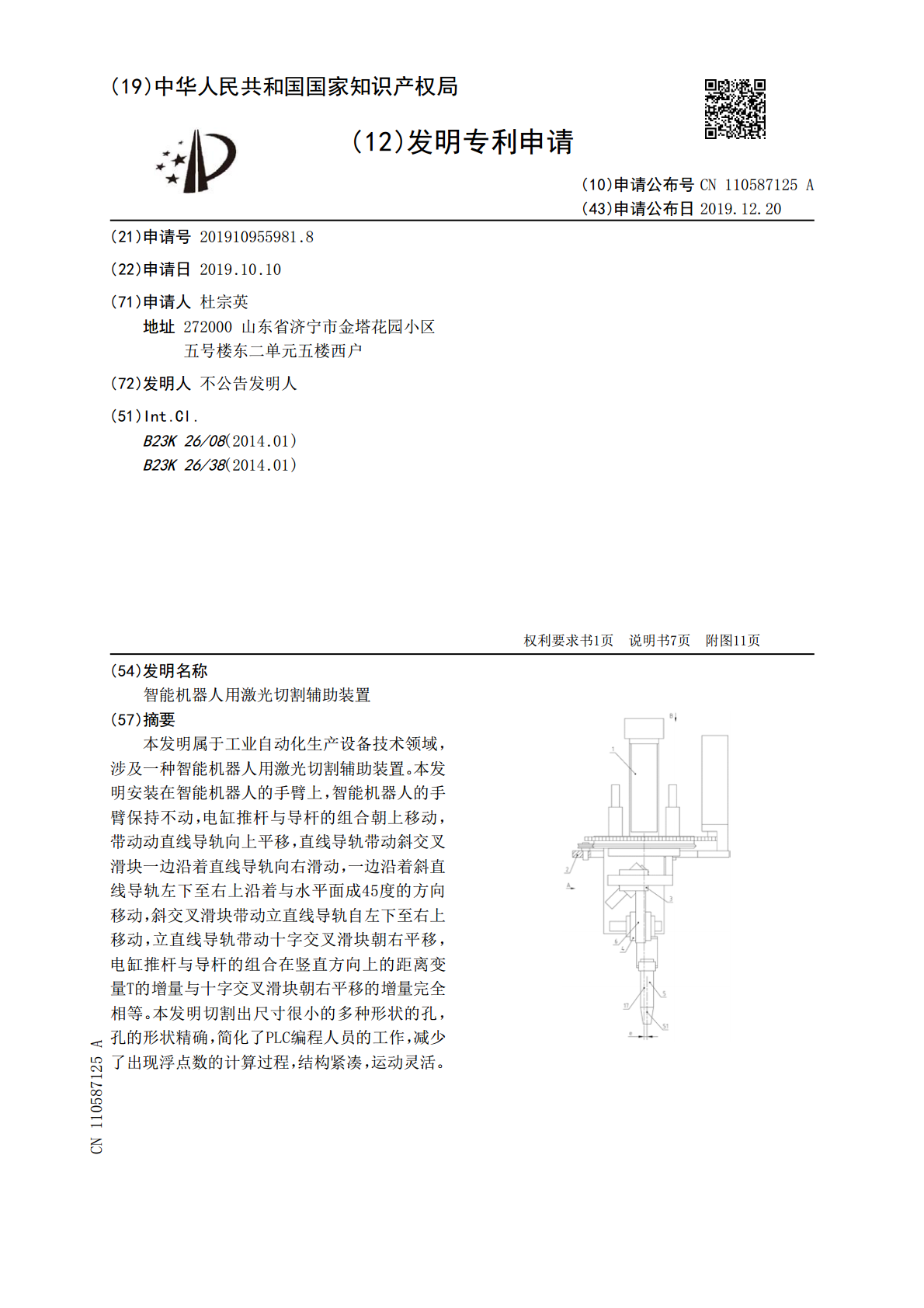
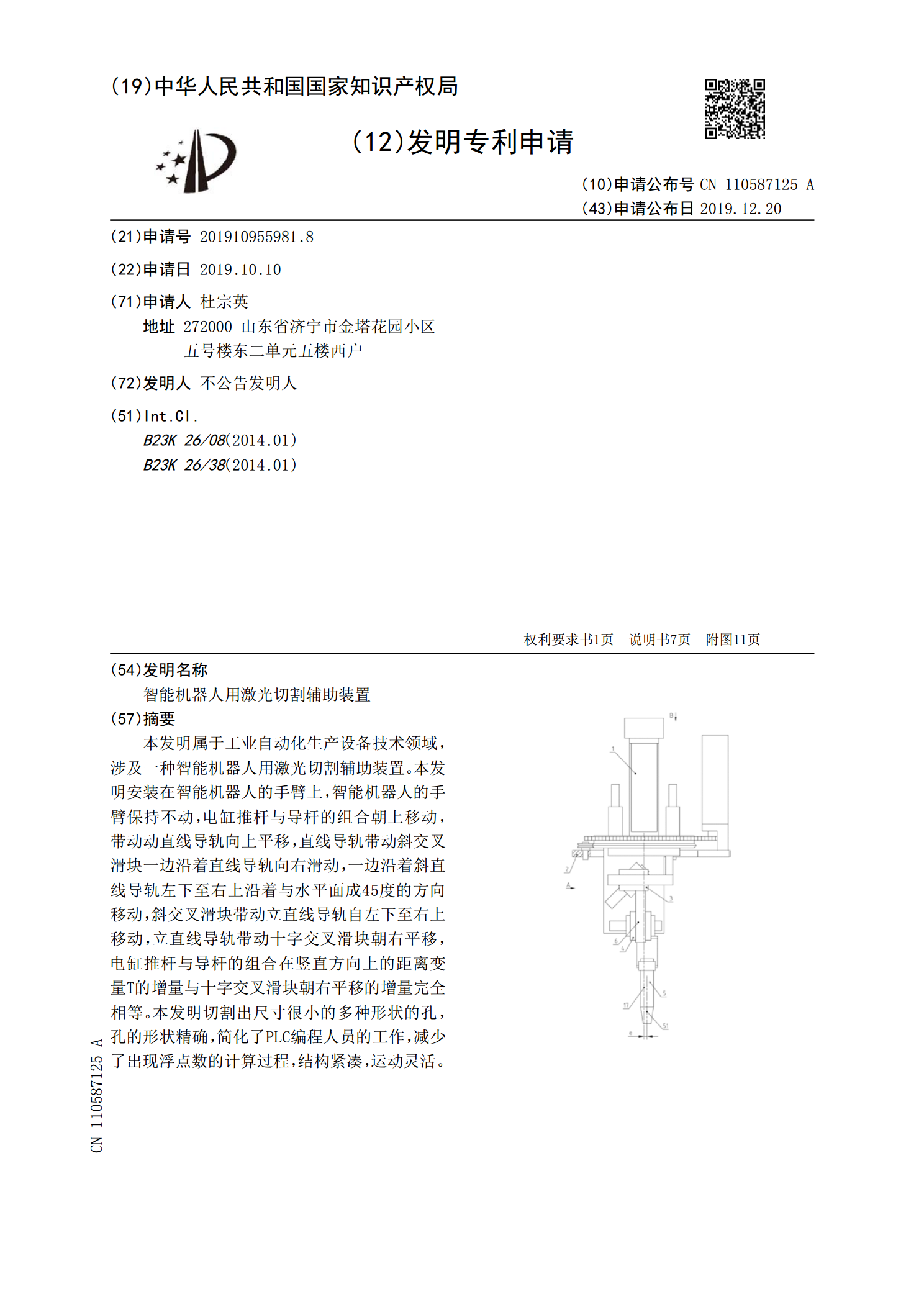
本发明属于工业自动化生产设备技术领域,涉及一种智能机器人用激光切割辅助装置。本发明安装在智能机器人的手臂上,智能机器人的手臂保持不动,电缸推杆与导杆的组合朝上移动,带动动直线导轨向上平移,直线导轨带动斜交叉滑块一边沿着直线导轨向右滑动,一边沿着斜直线导轨左下至右上沿着与水平面成45度的方向移动,斜交叉滑块带动立直线导轨自左下至右上移动,立直线导轨带动十字交叉滑块朝右平移,电缸推杆与导杆的组合在竖直方向上的距离变量T的增量与十字交叉滑块朝右平移的增量完全相等。本发明切割出尺寸很小的多种形状的孔,孔的形状精确
激光切割辅助装置.pdf
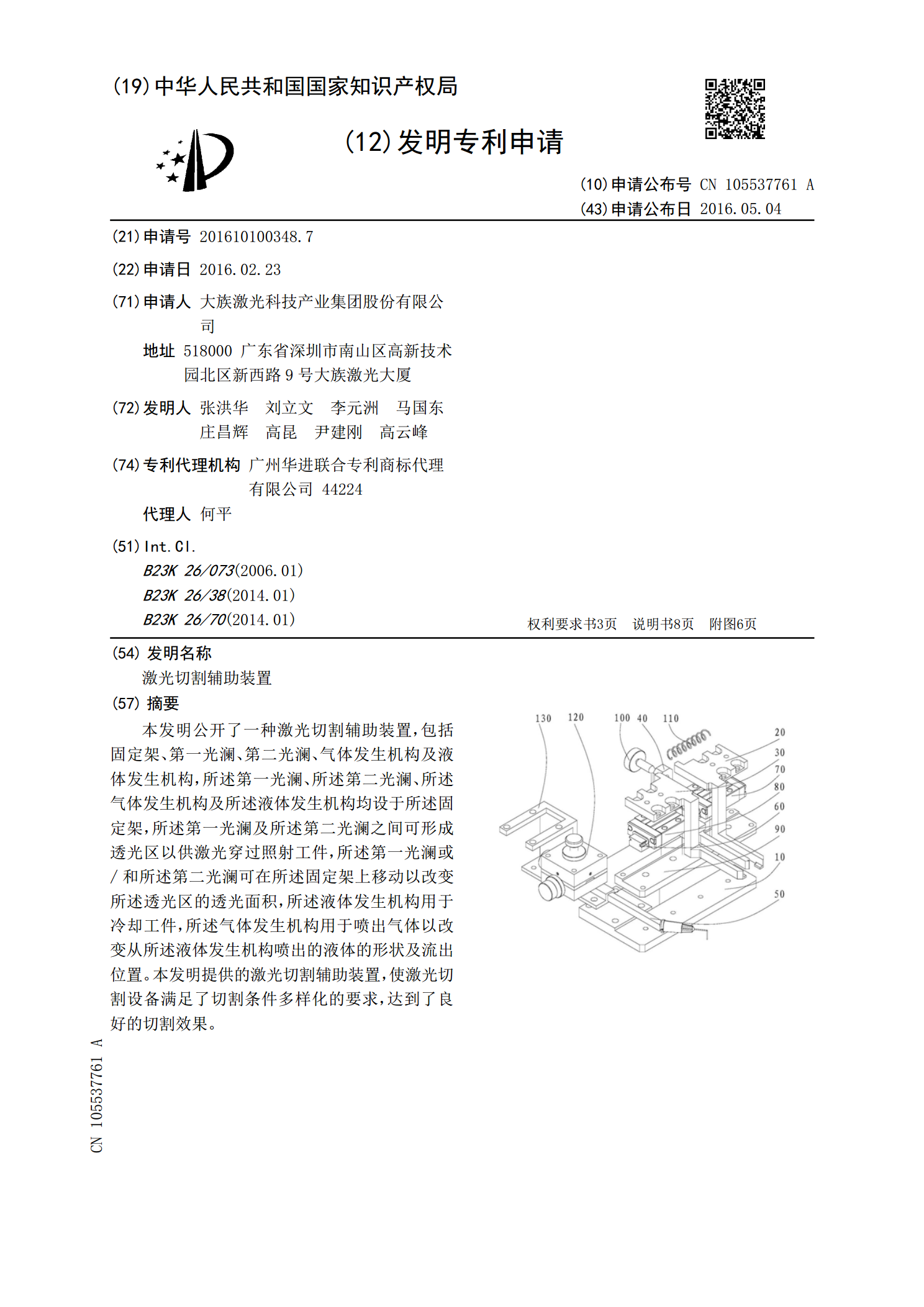
本发明公开了一种激光切割辅助装置,包括固定架、第一光澜、第二光澜、气体发生机构及液体发生机构,所述第一光澜、所述第二光澜、所述气体发生机构及所述液体发生机构均设于所述固定架,所述第一光澜及所述第二光澜之间可形成透光区以供激光穿过照射工件,所述第一光澜或/和所述第二光澜可在所述固定架上移动以改变所述透光区的透光面积,所述液体发生机构用于冷却工件,所述气体发生机构用于喷出气体以改变从所述液体发生机构喷出的液体的形状及流出位置。本发明提供的激光切割辅助装置,使激光切割设备满足了切割条件多样化的要求,达到了良好的

激光切割机器人的辅助定位装置.pdf
本发明属于激光切割机器人改进装置领域,具体公开了激光切割机器人的辅助定位装置,包括机械部分和电路部分;机械部分包括底板、横轴板、竖轴板、横轴推杆、竖轴推杆,横轴板和竖轴板均固定在底板上,横轴板的一端与竖轴板的一端呈直角固定连接,横轴推杆与竖轴推杆相互垂直,横轴推杆和竖轴推杆上均设有滑块,底板上设有滑槽,横轴推杆和竖轴推杆均与底板滑动连接,横轴推杆和竖轴推杆上均设有液压推杆;电路部分包括激光接收管、单片机,横轴板和竖轴板的连接处设有盲孔,激光接收管固定在盲孔内,激光接收管与单片机电连接,单片机与激光切割机器

激光切割用辅助片.pdf
本发明提供能够防止因激光的照射而导致的全切切割时的芯片飞溅的激光切割用辅助片。激光切割用辅助片具有由粘合剂组合物形成的粘合层。粘合层的特征在于,按照其构成材料(粘合剂组合物)的500℃下的残留重量(在氮气流下(50ml/分钟)、以升温速度10℃/分钟进行测定)成为5.5%以下的方式调整。
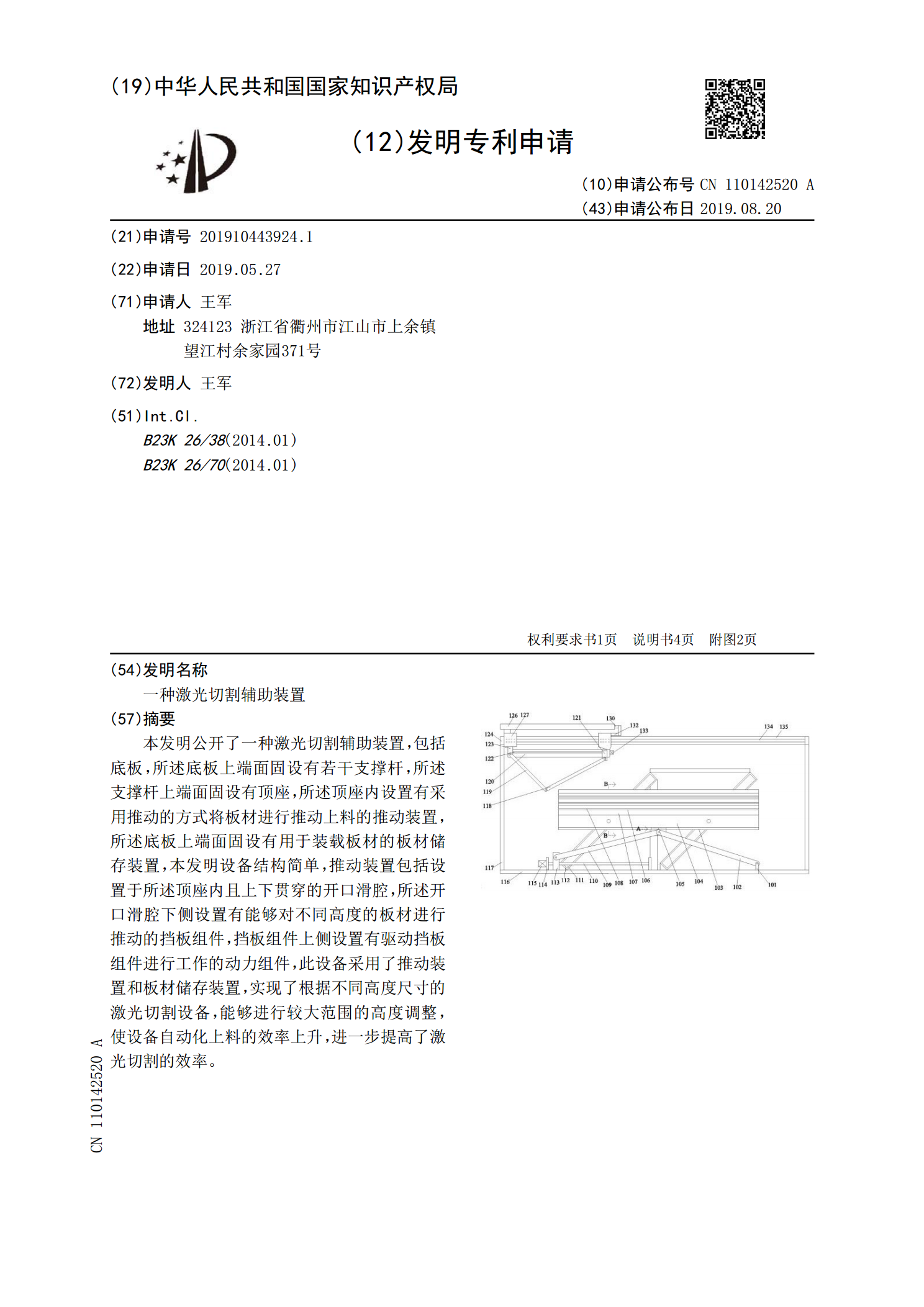
一种激光切割辅助装置.pdf
本发明公开了一种激光切割辅助装置,包括底板,所述底板上端面固设有若干支撑杆,所述支撑杆上端面固设有顶座,所述顶座内设置有采用推动的方式将板材进行推动上料的推动装置,所述底板上端面固设有用于装载板材的板材储存装置,本发明设备结构简单,推动装置包括设置于所述顶座内且上下贯穿的开口滑腔,所述开口滑腔下侧设置有能够对不同高度的板材进行推动的挡板组件,挡板组件上侧设置有驱动挡板组件进行工作的动力组件,此设备采用了推动装置和板材储存装置,实现了根据不同高度尺寸的激光切割设备,能够进行较大范围的高度调整,使设备自动化上