
一种基于脑机控制的爬壁打磨装置及其控制方法.pdf

论文****轩吖

1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于脑机控制的爬壁打磨装置及其控制方法.pdf
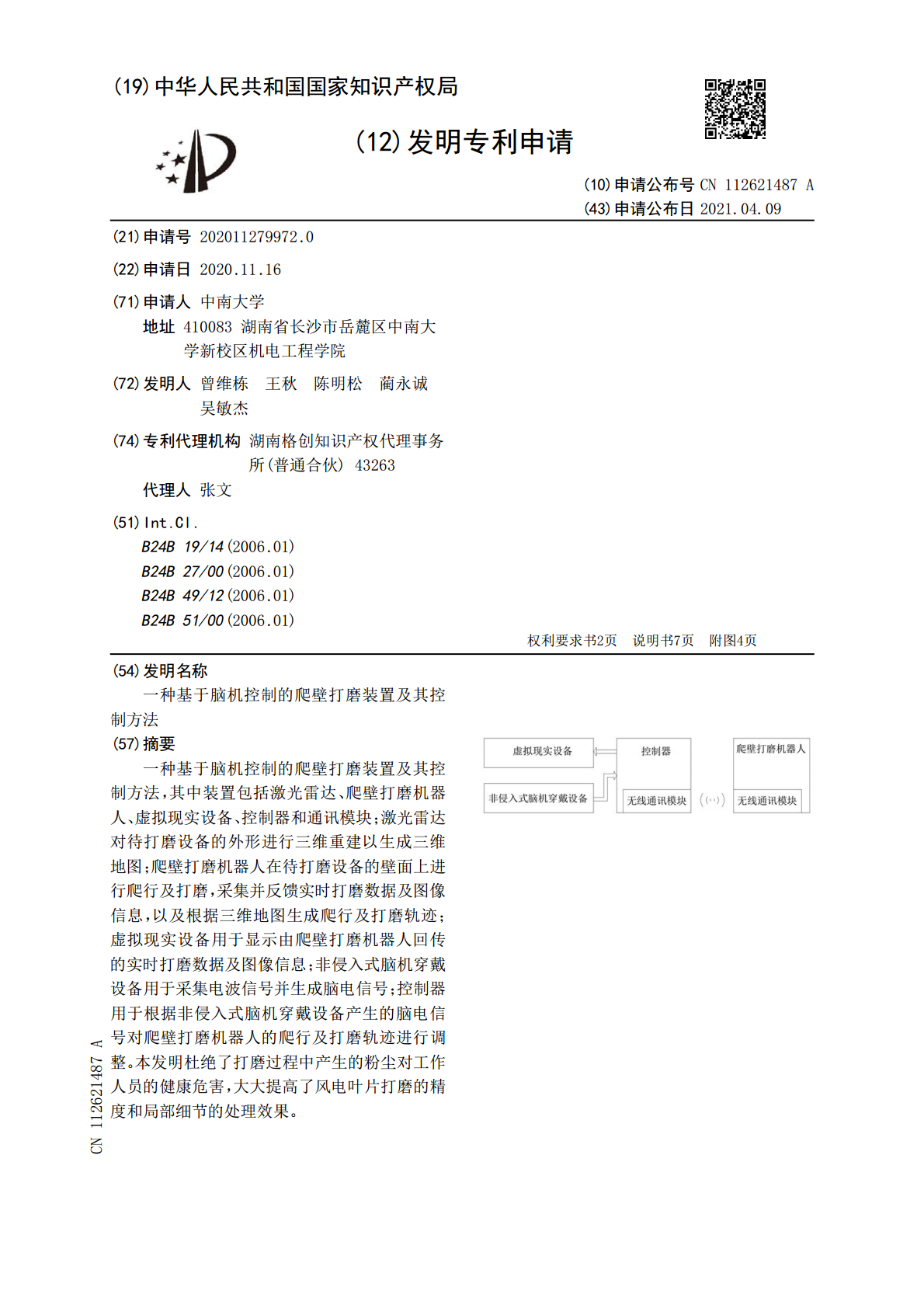
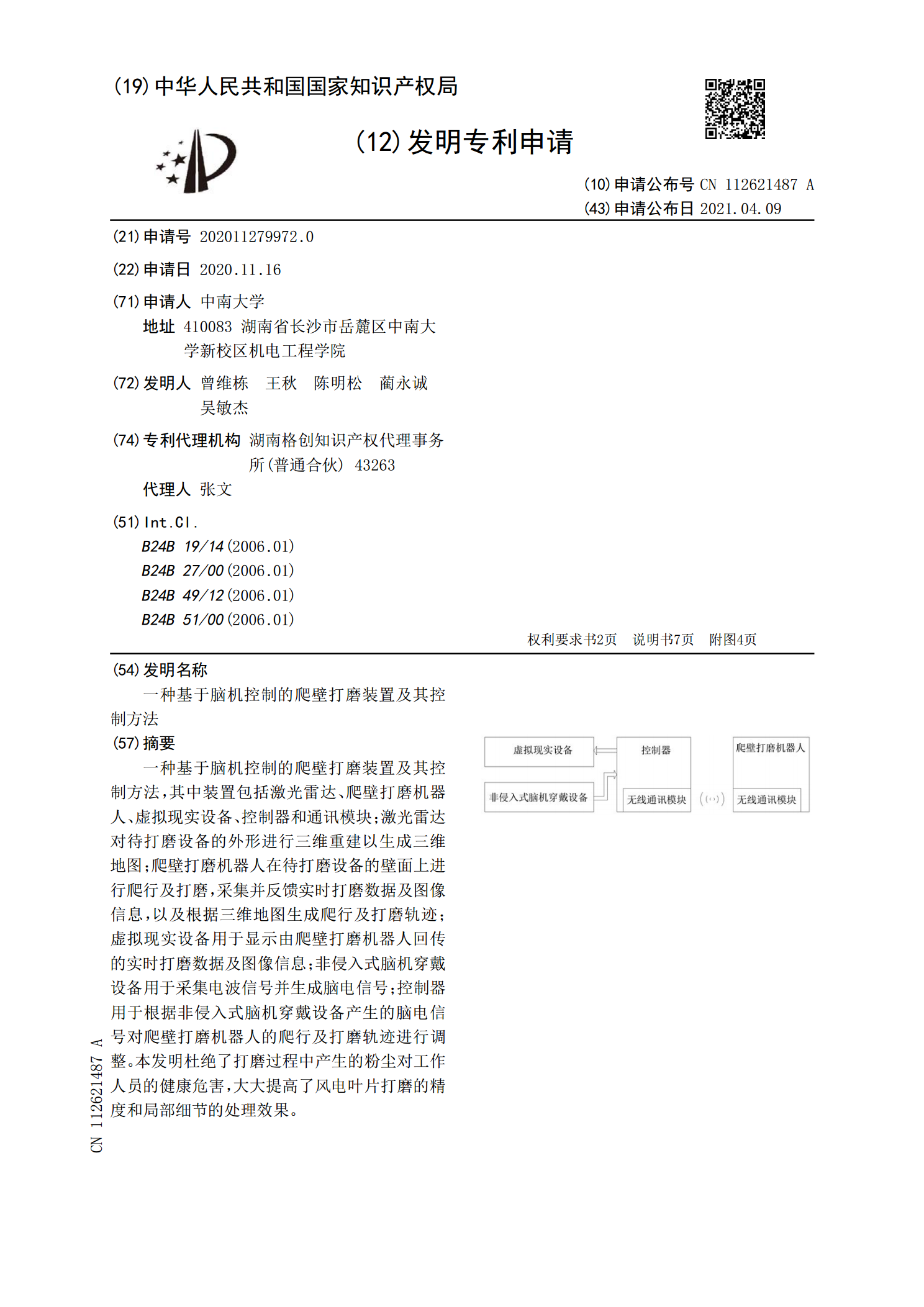
一种基于脑机控制的爬壁打磨装置及其控制方法,其中装置包括激光雷达、爬壁打磨机器人、虚拟现实设备、控制器和通讯模块;激光雷达对待打磨设备的外形进行三维重建以生成三维地图;爬壁打磨机器人在待打磨设备的壁面上进行爬行及打磨,采集并反馈实时打磨数据及图像信息,以及根据三维地图生成爬行及打磨轨迹;虚拟现实设备用于显示由爬壁打磨机器人回传的实时打磨数据及图像信息;非侵入式脑机穿戴设备用于采集电波信号并生成脑电信号;控制器用于根据非侵入式脑机穿戴设备产生的脑电信号对爬壁打磨机器人的爬行及打磨轨迹进行调整。本发明杜绝了打
一种爬壁机器人跌落保护装置及其控制方法.pdf
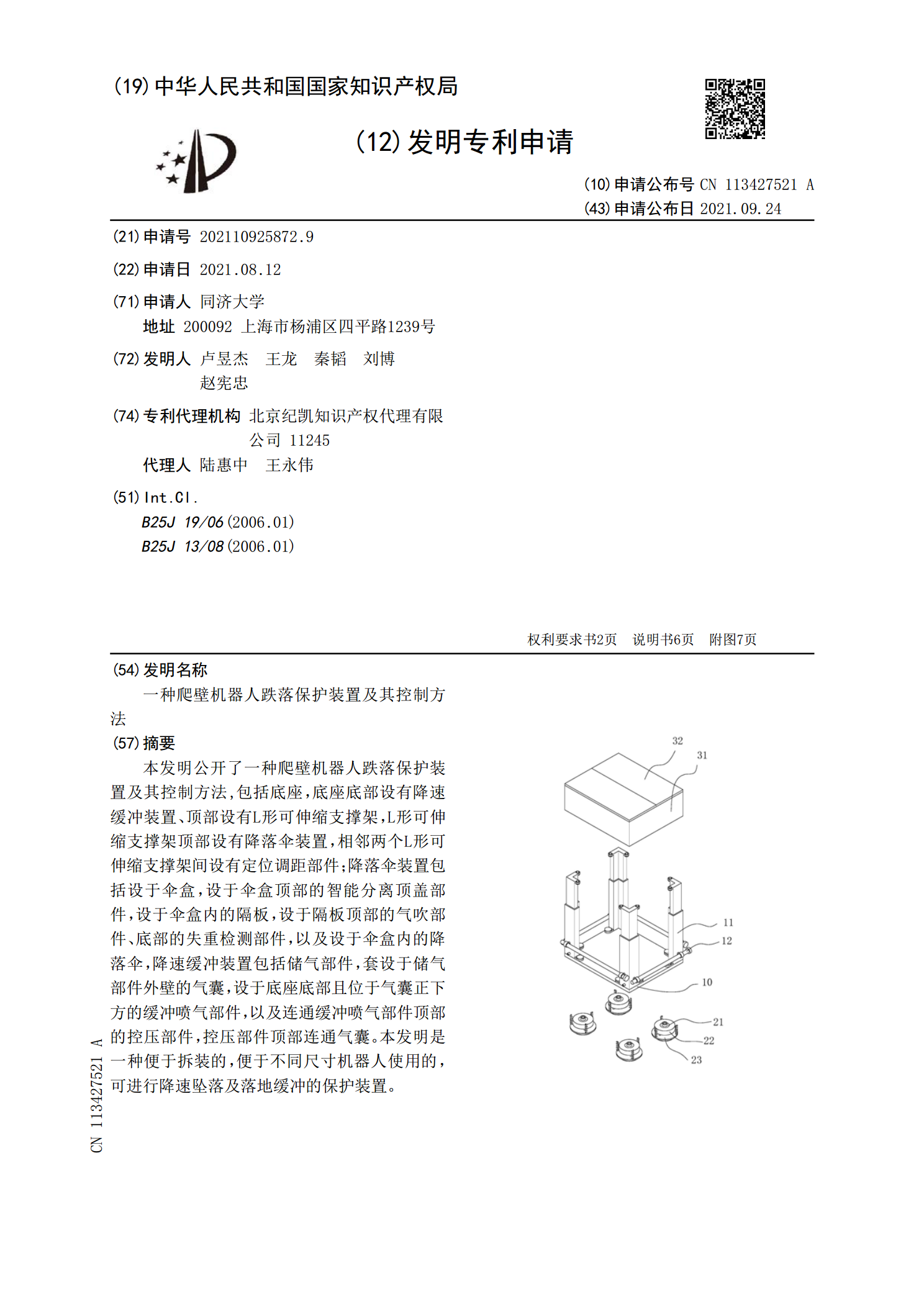
本发明公开了一种爬壁机器人跌落保护装置及其控制方法,包括底座,底座底部设有降速缓冲装置、顶部设有L形可伸缩支撑架,L形可伸缩支撑架顶部设有降落伞装置,相邻两个L形可伸缩支撑架间设有定位调距部件;降落伞装置包括设于伞盒,设于伞盒顶部的智能分离顶盖部件,设于伞盒内的隔板,设于隔板顶部的气吹部件、底部的失重检测部件,以及设于伞盒内的降落伞,降速缓冲装置包括储气部件,套设于储气部件外壁的气囊,设于底座底部且位于气囊正下方的缓冲喷气部件,以及连通缓冲喷气部件顶部的控压部件,控压部件顶部连通气囊。本发明是一种便于拆装

一种内窥镜打磨装置及其控制方法.pdf
本发明公开了一种内窥镜打磨装置及其控制方法,包括底板,底板的上端设有方环板,方环板的上端两侧设有第一调节装置,第一调节装置中第一滑轨的上端设有立杆,立杆的上端内侧面与横杆的两端固定连接,立杆的前侧设有第二调节装置,第二调节装置中支杆的前侧中部设有角度调节装置,角度调节装置中滑轴的前端设有加固装置,底板的上端中心处设有工作台,该内窥镜打磨装置结构简单,使用方便,给使用者的使用带来了极大的便利,提高对内窥镜的打磨精准度,保证了产品打磨质量,设置有专用的内窥镜固定位,而且可以根据镜子的打磨角度实现一百八十度任意
一种船舶爬壁清洗车系统及其控制装置.pdf
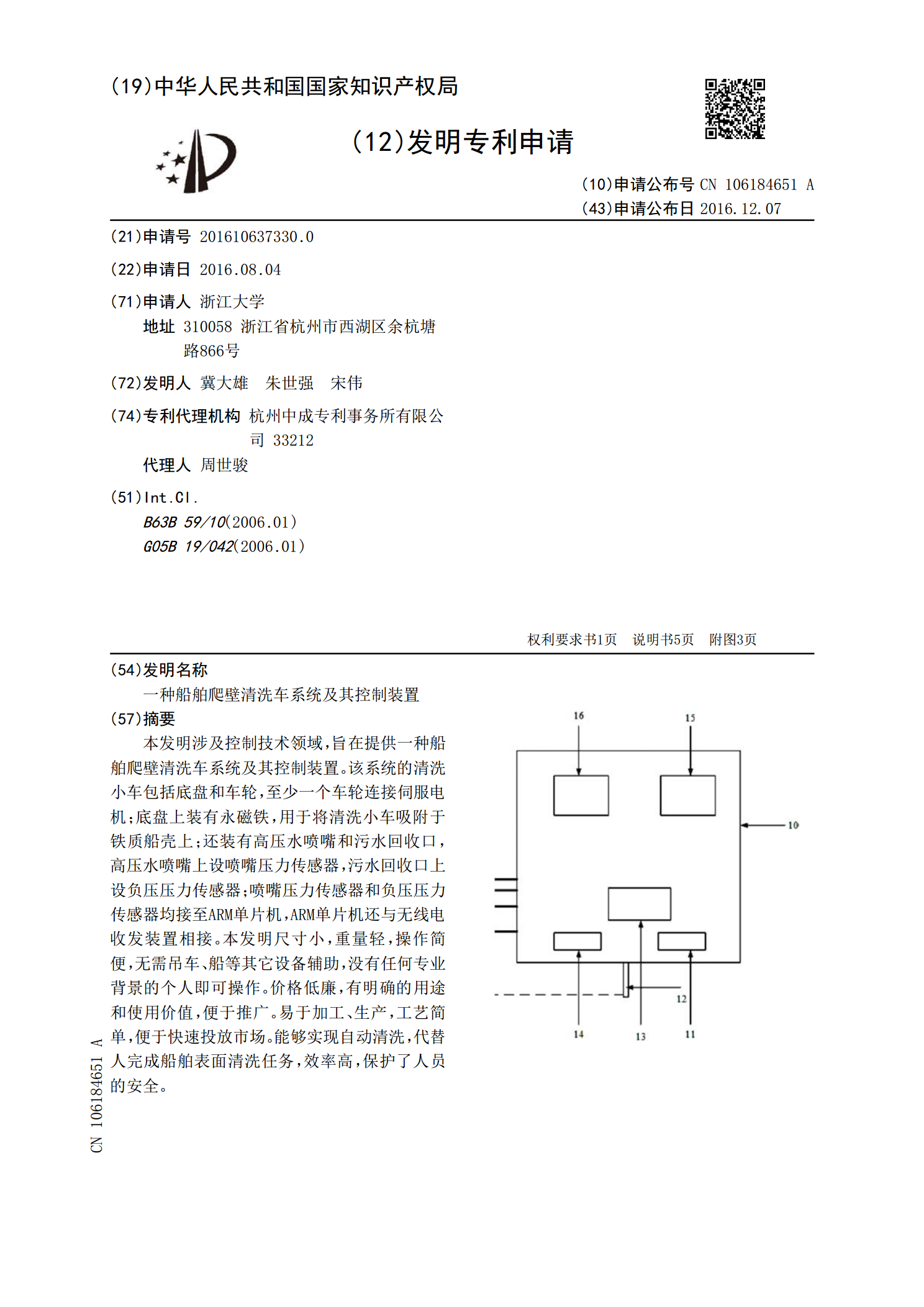
本发明涉及控制技术领域,旨在提供一种船舶爬壁清洗车系统及其控制装置。该系统的清洗小车包括底盘和车轮,至少一个车轮连接伺服电机;底盘上装有永磁铁,用于将清洗小车吸附于铁质船壳上;还装有高压水喷嘴和污水回收口,高压水喷嘴上设喷嘴压力传感器,污水回收口上设负压压力传感器;喷嘴压力传感器和负压压力传感器均接至ARM单片机,ARM单片机还与无线电收发装置相接。本发明尺寸小,重量轻,操作简便,无需吊车、船等其它设备辅助,没有任何专业背景的个人即可操作。价格低廉,有明确的用途和使用价值,便于推广。易于加工、生产,工艺简

一种基于脑机接口的猴子下肢外骨骼系统及其控制方法.pdf
本申请提供一种基于脑机接口的猴子下肢外骨骼系统,包括脑机接口设备和外骨骼设备;外骨骼设备包括背板结构、相对设置在背板结构左右两侧的腰部调节结构和与腰部调节结构连接的下肢驱动结构;腰部调节结构包括调节两个下肢驱动结构间距的第一调节组件和调节下肢驱动结构与背板结构间距的第二调节组件;下肢驱动结构包括电机组件设置在电机组件输出端的传感器组件;背板结构包括控制电机组件转动的驱动器;脑机接口设备与传感器组件和驱动器无线连接;驱动器与电机组件电连接。通过将腰部调节结构设置在背板结构与下肢驱动结构之间,便于对两个下肢驱