
一种悬挂链物料自动取放装置.pdf

雨星****萌娃


1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种悬挂链物料自动取放装置.pdf
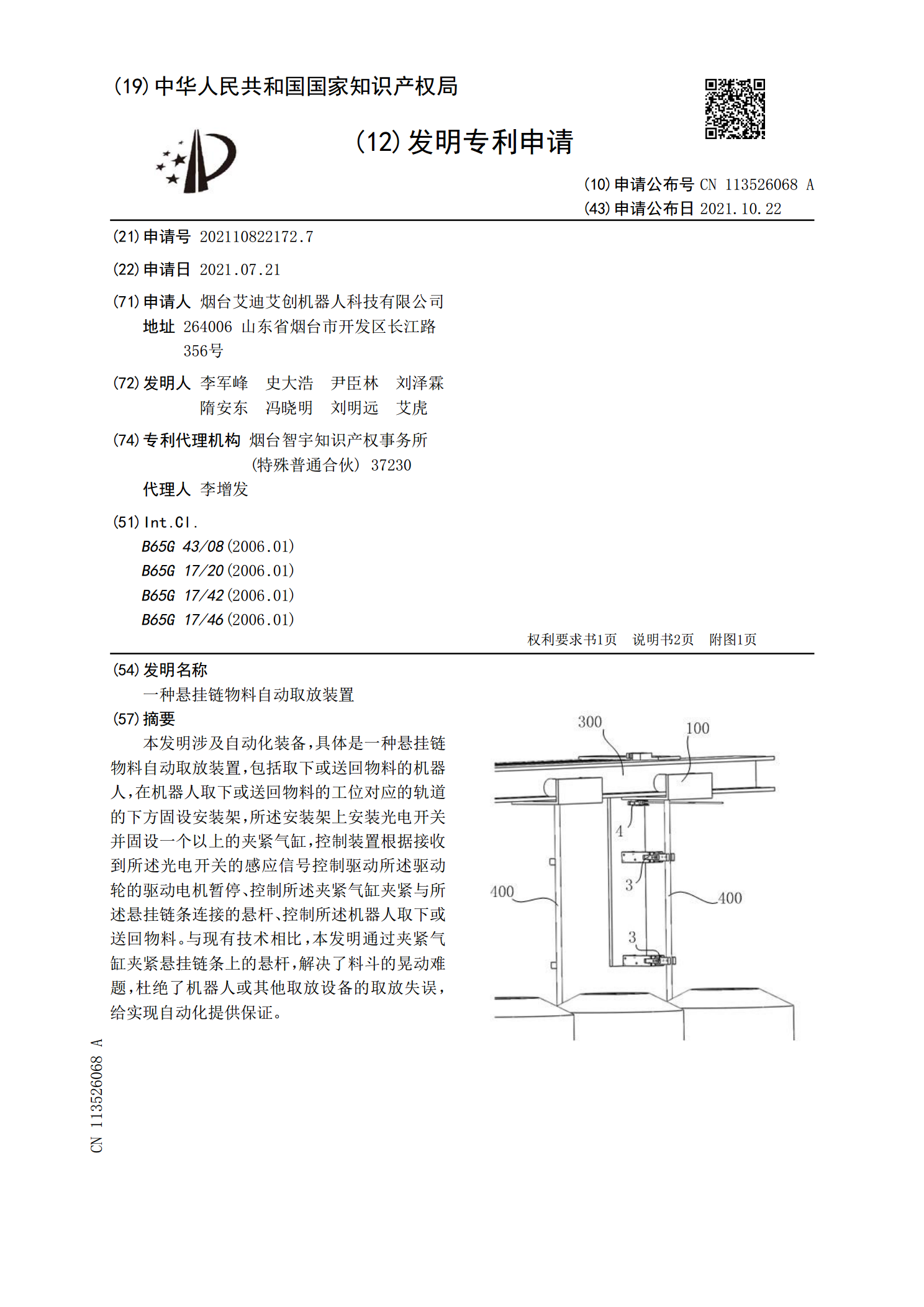
本发明涉及自动化装备,具体是一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,在机器人取下或送回物料的工位对应的轨道的下方固设安装架,所述安装架上安装光电开关并固设一个以上的夹紧气缸,控制装置根据接收到所述光电开关的感应信号控制驱动所述驱动轮的驱动电机暂停、控制所述夹紧气缸夹紧与所述悬挂链条连接的悬杆、控制所述机器人取下或送回物料。与现有技术相比,本发明通过夹紧气缸夹紧悬挂链条上的悬杆,解决了料斗的晃动难题,杜绝了机器人或其他取放设备的取放失误,给实现自动化提供保证。
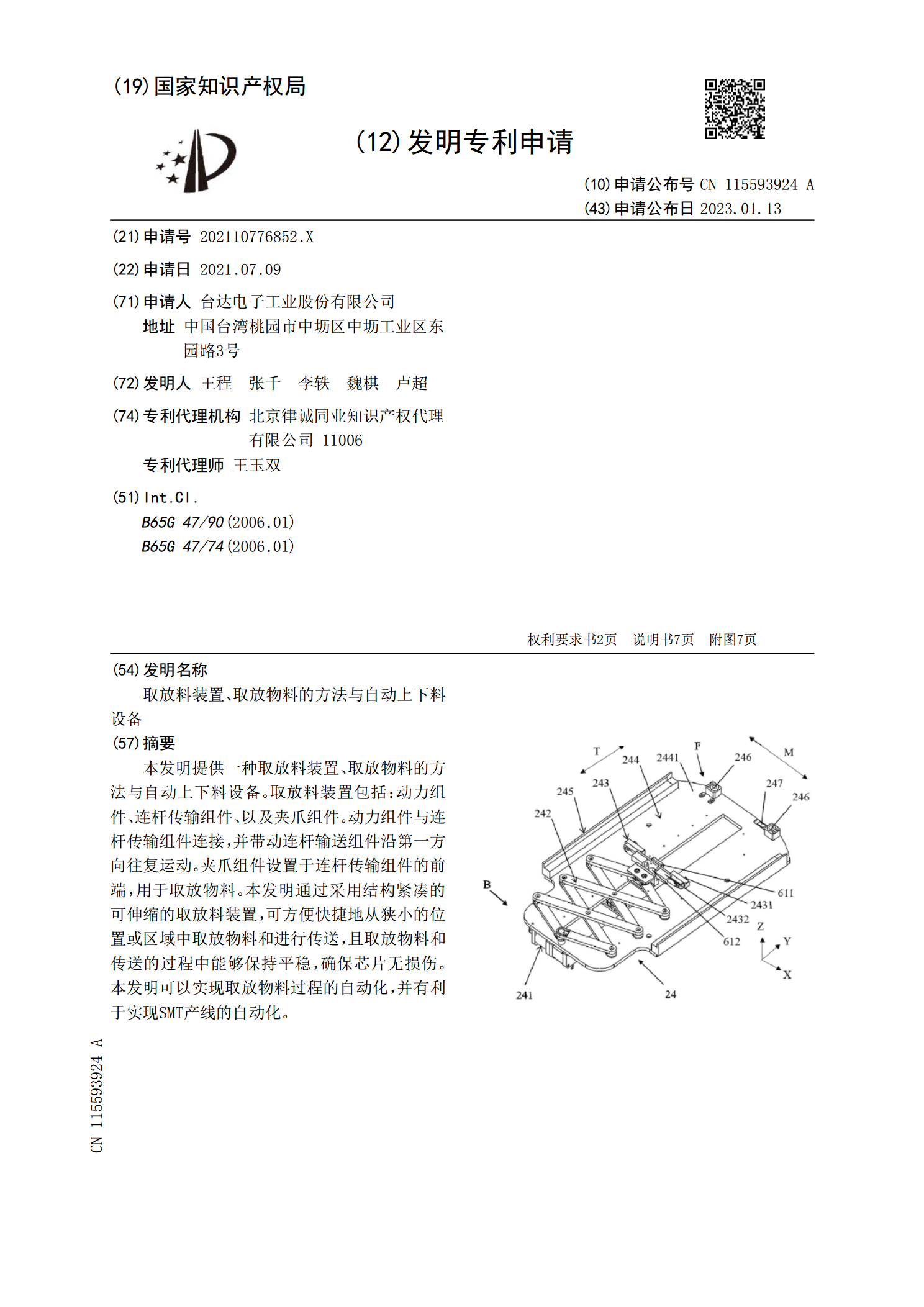
取放料装置、取放物料的方法与自动上下料设备.pdf
本发明提供一种取放料装置、取放物料的方法与自动上下料设备。取放料装置包括:动力组件、连杆传输组件、以及夹爪组件。动力组件与连杆传输组件连接,并带动连杆输送组件沿第一方向往复运动。夹爪组件设置于连杆传输组件的前端,用于取放物料。本发明通过采用结构紧凑的可伸缩的取放料装置,可方便快捷地从狭小的位置或区域中取放物料和进行传送,且取放物料和传送的过程中能够保持平稳,确保芯片无损伤。本发明可以实现取放物料过程的自动化,并有利于实现SMT产线的自动化。

一种物料取放翻转装置.pdf
本发明一种物料取放翻转装置,涉及一种翻转装置,尤其涉及一种具备物料取放的翻转装置,所要解决的技术问题是提供了安全可靠,方便细微调节的物料取放翻转机构,所采用的技术方案为:一种物料取放翻转装置,包括:动力装置,第一传动系统,本体部分,第二传动系统,夹具装置,所带来的有益效果是:克服了现有技术中由于工作液介质容易压缩,液压元件泄露等原因而带来的液压装置不可靠性的问题,翻转机构可以停留在任意的角度,不会产生翻转机构回转等问题,满足了某些产品对翻转角度需要细微调整的要求,本发明可以广泛应用于物料的取放等场合。
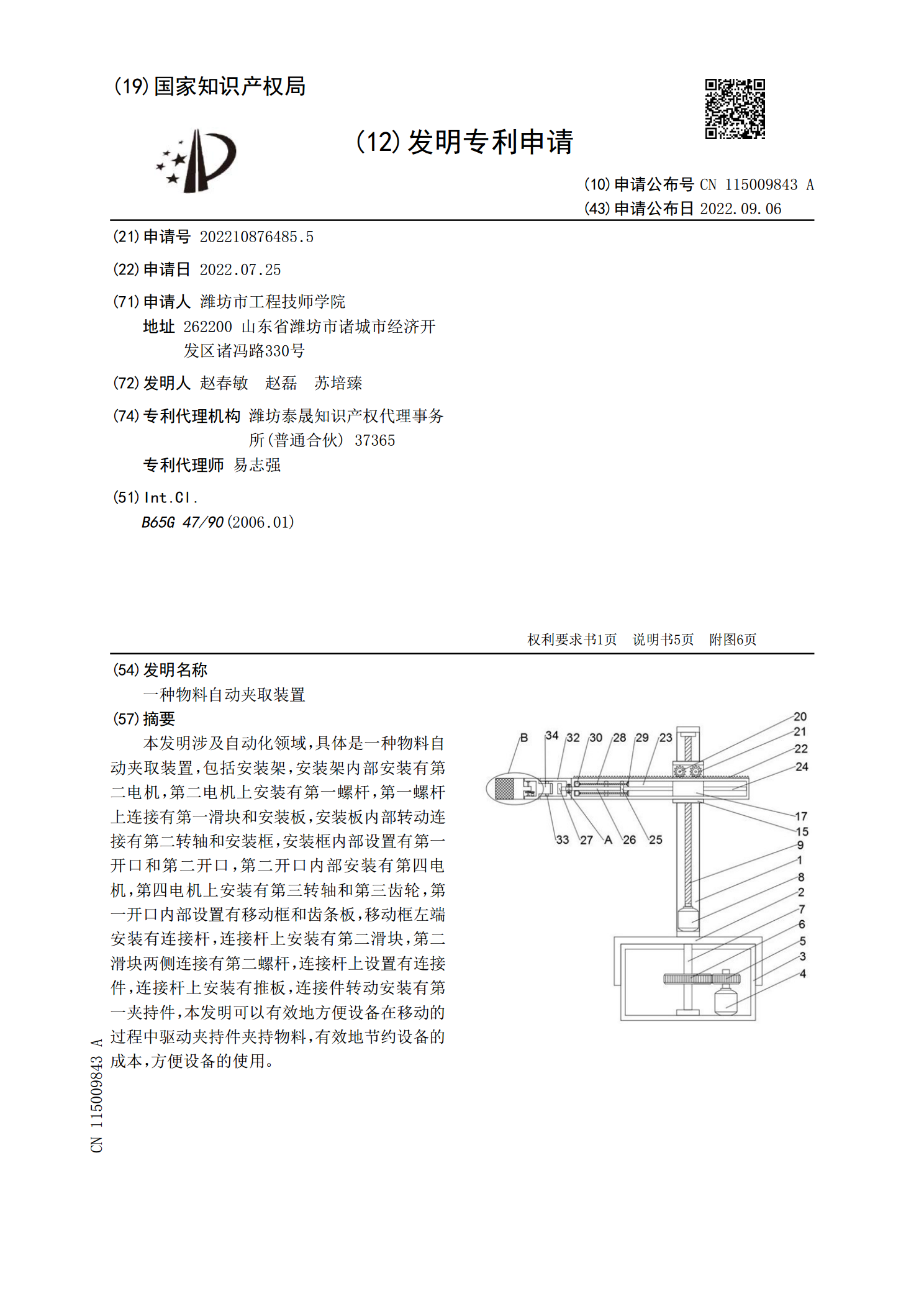
一种物料自动夹取装置.pdf
本发明涉及自动化领域,具体是一种物料自动夹取装置,包括安装架,安装架内部安装有第二电机,第二电机上安装有第一螺杆,第一螺杆上连接有第一滑块和安装板,安装板内部转动连接有第二转轴和安装框,安装框内部设置有第一开口和第二开口,第二开口内部安装有第四电机,第四电机上安装有第三转轴和第三齿轮,第一开口内部设置有移动框和齿条板,移动框左端安装有连接杆,连接杆上安装有第二滑块,第二滑块两侧连接有第二螺杆,连接杆上设置有连接件,连接杆上安装有推板,连接件转动安装有第一夹持件,本发明可以有效地方便设备在移动的过程中驱动夹

一种超临界萃取装置的物料筒取放装置.pdf
本申请公开了一种超临界萃取装置的物料筒取放装置,物料筒取放装置包括支撑架、平台、升降装置和导向装置,支撑架制成平台,升降装置和导向装置均设置于平台,升降装置能够升降萃取釜内的物料筒;导向装置包括对称设置的一对弧形夹板,每个弧形夹板内侧面均布有多个滚轮,每个弧形夹板均通过连接杆设置于平台。由此,能够通过物料筒取放装置对萃取釜内的物料筒装入或取出,提高生产效率,减少人工成本,升降装置在升降物料筒时,两个弧形夹板对称夹持在物料筒两侧,能够防止物料筒晃动,提高稳定性。