
基于传感信息及目标追踪的多模信息系统及其融合方法.pdf

丹烟****魔王


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于传感信息及目标追踪的多模信息系统及其融合方法.pdf
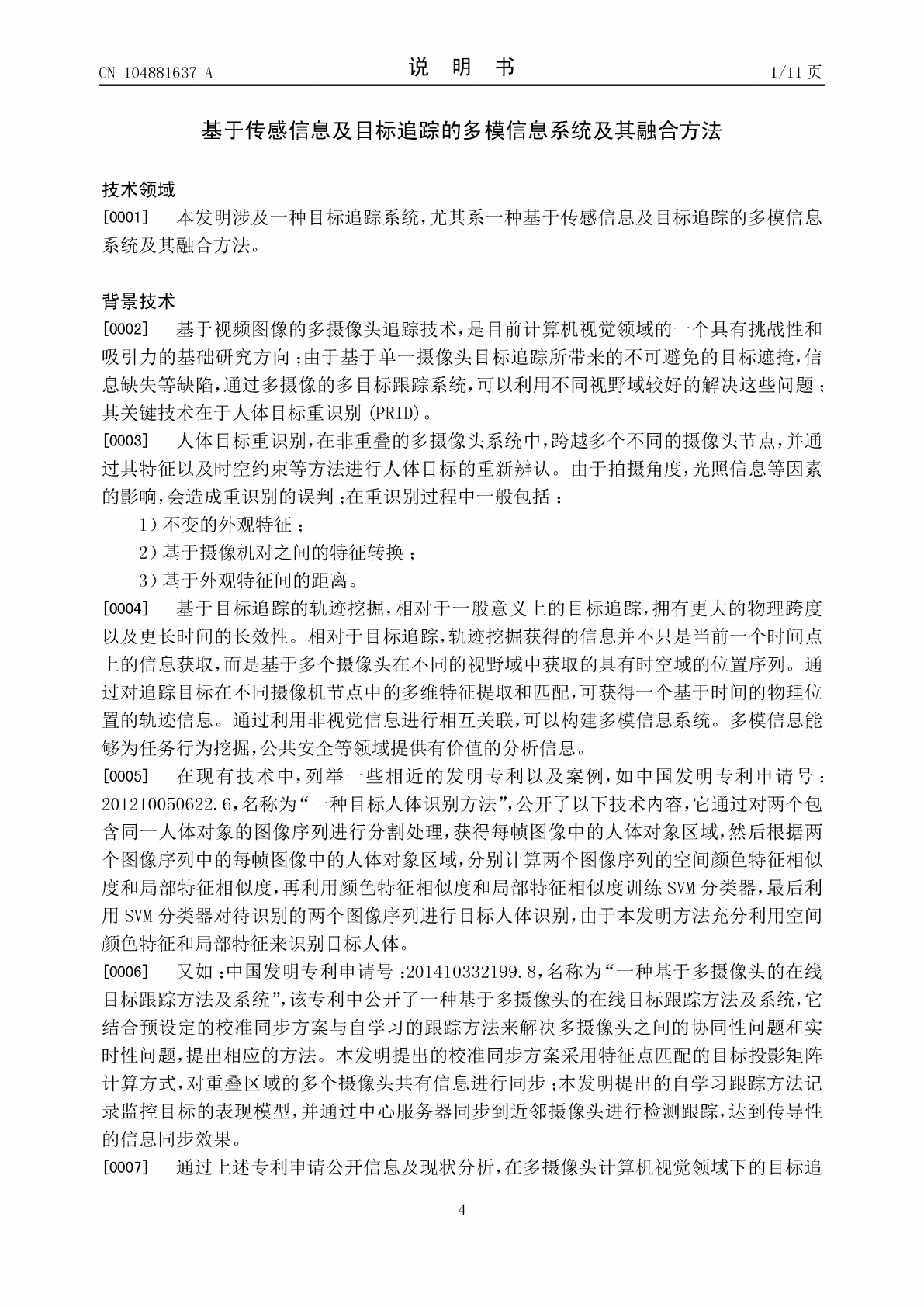
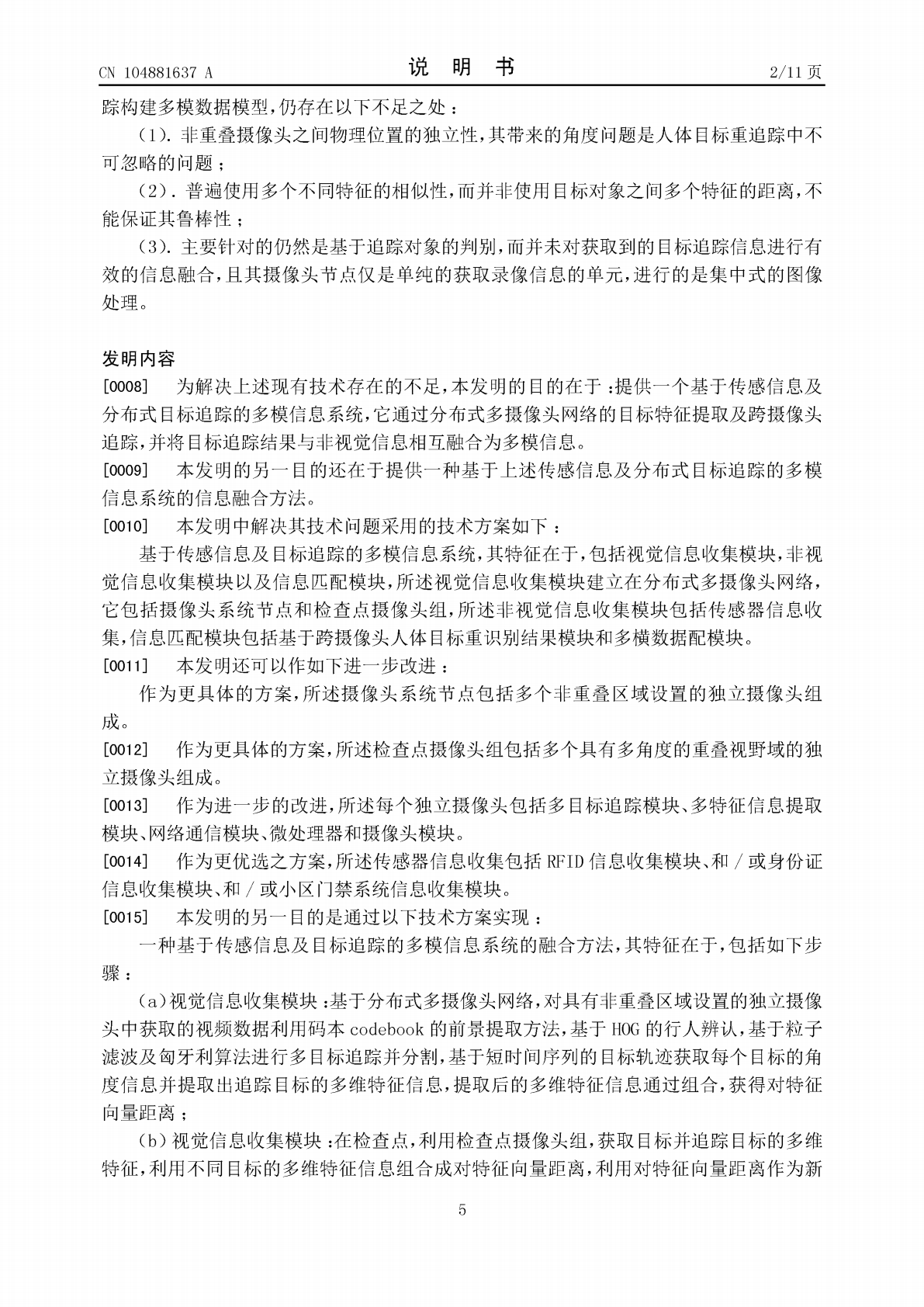
本发明公开了一种基于传感信息及目标追踪的多模信息系统,其特征在于,包括视觉信息收集模块,非视觉信息收集模块以及信息匹配模块,所述视觉信息收集模块建立在分布式多摄像头网络,它包括摄像头系统节点和检查点摄像头组,所述非视觉信息收集模块包括传感器信息收集,信息匹配模块包括基于跨摄像头人体目标重识别结果模块和多横数据配模块;本发明具有适用范围广泛,可降低后台图像识别处理压力,提供长效历史数据等优点,并可广泛应用于人物追踪,行为挖掘,公共安全等领域。

基于多传感器融合的无人艇海面目标追踪方法及装置.pdf
本发明公开了一种基于多传感器融合的无人艇海面目标追踪方法及装置,涉及无人艇目标跟踪技术领域,该方法包括获取激光雷达采集的原始点云数据;获取毫米波雷达采集的原始毫米波数据;对所述原始点云数据和所述原始毫米波数据进行融合处理,得到融合后的目标信息;基于所述融合后的目标信息,对海面上的目标进行跟踪。本发明基于激光雷达采集的原始点云数据和毫米波雷达采集的原始毫米波数据进行目标跟踪,即采用毫米波雷达和激光雷达结合的方式进行目标跟踪,扩展了无人艇感知系统的适应场景,提高了得到目标信息的精度,增强了无人艇在海上航行的安
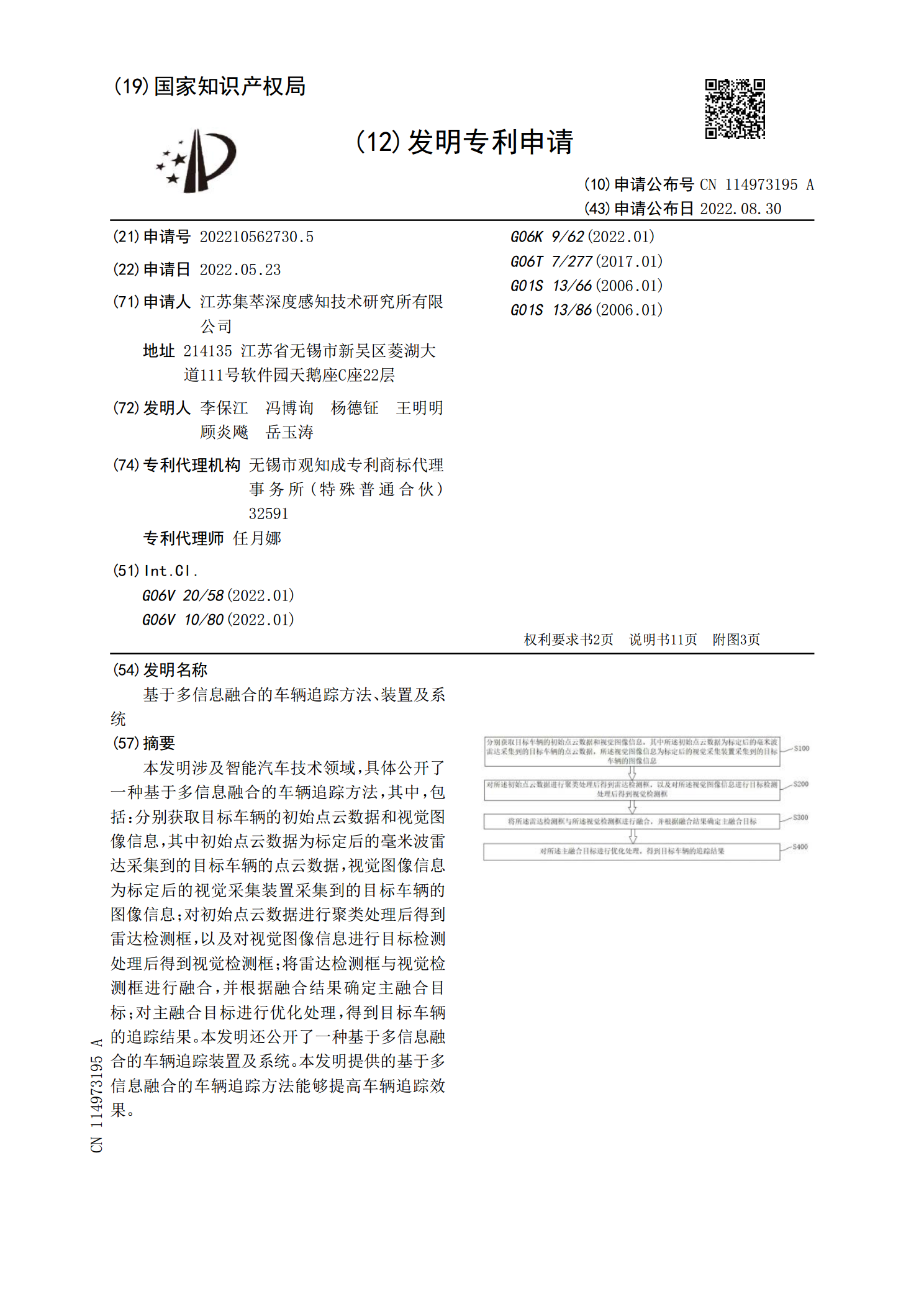
基于多信息融合的车辆追踪方法、装置及系统.pdf
本发明涉及智能汽车技术领域,具体公开了一种基于多信息融合的车辆追踪方法,其中,包括:分别获取目标车辆的初始点云数据和视觉图像信息,其中初始点云数据为标定后的毫米波雷达采集到的目标车辆的点云数据,视觉图像信息为标定后的视觉采集装置采集到的目标车辆的图像信息;对初始点云数据进行聚类处理后得到雷达检测框,以及对视觉图像信息进行目标检测处理后得到视觉检测框;将雷达检测框与视觉检测框进行融合,并根据融合结果确定主融合目标;对主融合目标进行优化处理,得到目标车辆的追踪结果。本发明还公开了一种基于多信息融合的车辆追踪装

基于多传感融合的目标跟踪方法研究.docx
基于多传感融合的目标跟踪方法研究摘要:目标跟踪是计算机视觉中的核心技术之一,它在各种领域中得到了广泛的应用。但是单一的传感器往往难以满足各种场景下的跟踪需求,因此多传感器融合成为目标跟踪中的一个重要方向。本文主要探讨了多传感器融合在目标跟踪中的应用以及其中的一些关键技术,以期为未来的研究提供一些借鉴和启示。关键词:目标跟踪;多传感器融合;多目标跟踪;卡尔曼滤波;粒子滤波一、引言在许多领域中,目标跟踪是计算机视觉中的一个重要问题。其涉及从相邻帧之间的图像序列中确定物体运动状态的过程,例如在自动驾驶汽车、安保

基于多特征融合的空对地目标检测和追踪方法.docx
基于多特征融合的空对地目标检测和追踪方法摘要:针对传统空对地目标检测和追踪方法存在的问题,本文提出了一种基于多特征融合的新方法。该方法通过综合使用颜色、形状、纹理多个特征来进行目标的检测和追踪,提高了检测和跟踪的准确率和性能。实验结果表明,该方法在空对地目标检测和追踪中具有较好的表现。关键词:空对地目标检测;空对地目标追踪;多特征融合;颜色;形状;纹理。1.绪论随着近年来无人机技术的快速发展,空对地目标检测与追踪得到了大量的关注。空对地目标检测和追踪涉及到计算机视觉、模式识别、机器学习等多个领域,是一个较