
基于多传感器融合的无人艇海面目标追踪方法及装置.pdf

戊午****jj


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多传感器融合的无人艇海面目标追踪方法及装置.pdf
本发明公开了一种基于多传感器融合的无人艇海面目标追踪方法及装置,涉及无人艇目标跟踪技术领域,该方法包括获取激光雷达采集的原始点云数据;获取毫米波雷达采集的原始毫米波数据;对所述原始点云数据和所述原始毫米波数据进行融合处理,得到融合后的目标信息;基于所述融合后的目标信息,对海面上的目标进行跟踪。本发明基于激光雷达采集的原始点云数据和毫米波雷达采集的原始毫米波数据进行目标跟踪,即采用毫米波雷达和激光雷达结合的方式进行目标跟踪,扩展了无人艇感知系统的适应场景,提高了得到目标信息的精度,增强了无人艇在海上航行的安
基于多模态传感器的水面无人艇环境信息融合感知方法.pdf
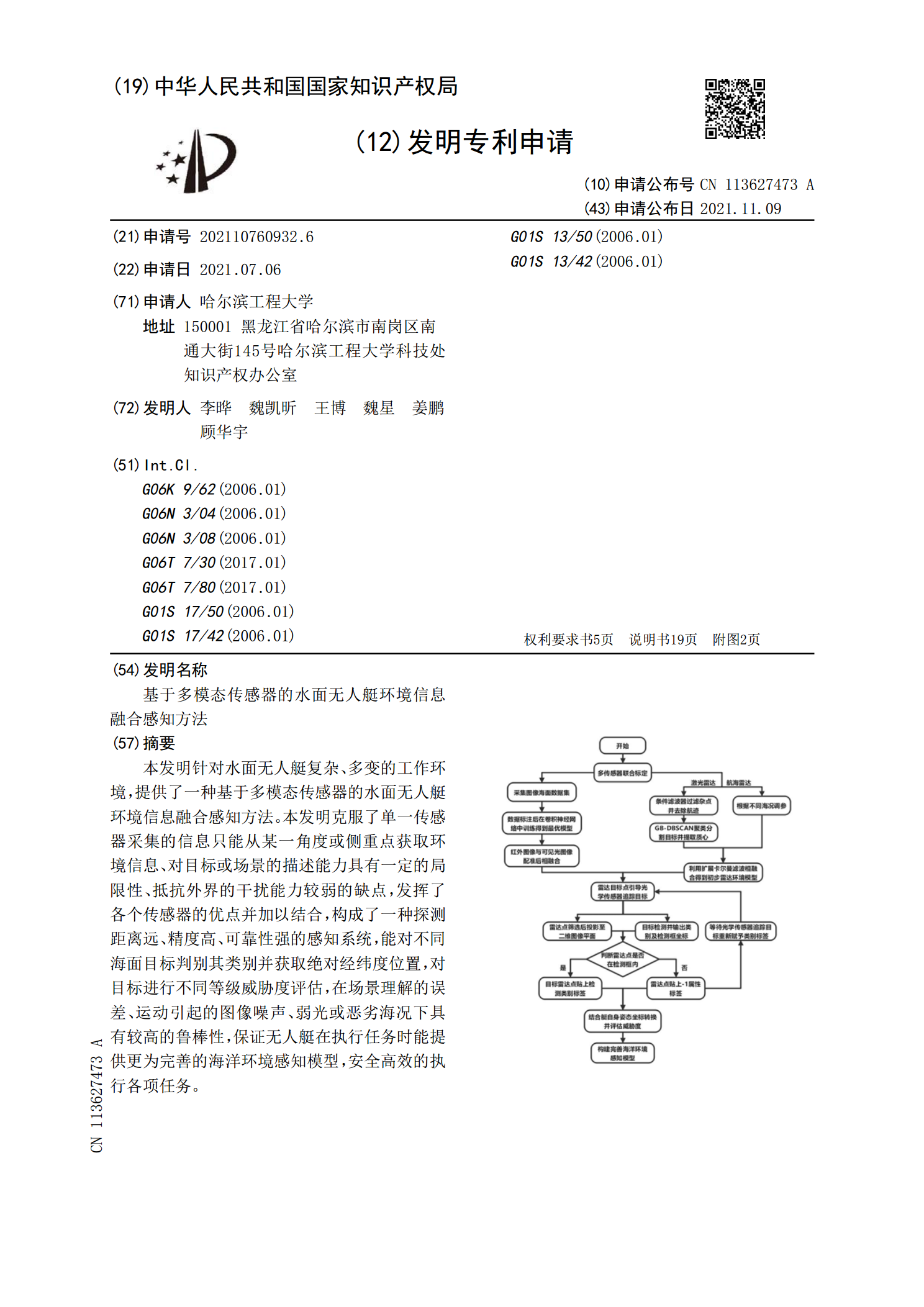
本发明针对水面无人艇复杂、多变的工作环境,提供了一种基于多模态传感器的水面无人艇环境信息融合感知方法。本发明克服了单一传感器采集的信息只能从某一角度或侧重点获取环境信息、对目标或场景的描述能力具有一定的局限性、抵抗外界的干扰能力较弱的缺点,发挥了各个传感器的优点并加以结合,构成了一种探测距离远、精度高、可靠性强的感知系统,能对不同海面目标判别其类别并获取绝对经纬度位置,对目标进行不同等级威胁度评估,在场景理解的误差、运动引起的图像噪声、弱光或恶劣海况下具有较高的鲁棒性,保证无人艇在执行任务时能提供更为完善
基于多信息融合的车辆追踪方法、装置及系统.pdf
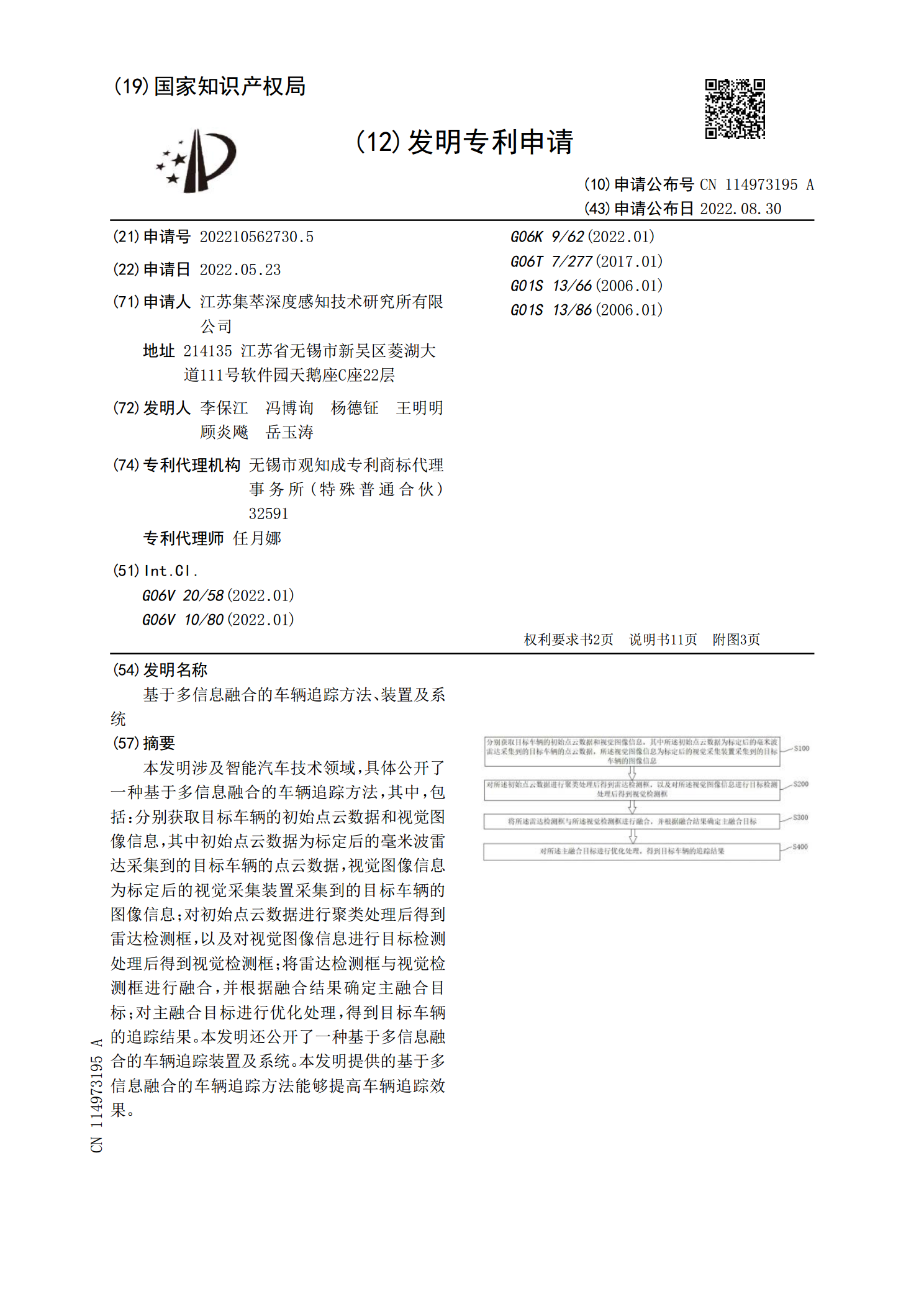
本发明涉及智能汽车技术领域,具体公开了一种基于多信息融合的车辆追踪方法,其中,包括:分别获取目标车辆的初始点云数据和视觉图像信息,其中初始点云数据为标定后的毫米波雷达采集到的目标车辆的点云数据,视觉图像信息为标定后的视觉采集装置采集到的目标车辆的图像信息;对初始点云数据进行聚类处理后得到雷达检测框,以及对视觉图像信息进行目标检测处理后得到视觉检测框;将雷达检测框与视觉检测框进行融合,并根据融合结果确定主融合目标;对主融合目标进行优化处理,得到目标车辆的追踪结果。本发明还公开了一种基于多信息融合的车辆追踪装

基于多传感器信息融合的无人水面艇岛岸环境建模的开题报告.docx
基于多传感器信息融合的无人水面艇岛岸环境建模的开题报告一、选题背景无人水面艇(USV)是近年来智能化、自主化航行技术蓬勃发展的一种典型代表,其功能包含了海洋勘探、监测、排污、气象探测和水下搜索等多方面应用。然而,要想让USV实现其更多的功能,除了掌握先进的自主航行技术之外,还需要更深入地了解水面环境,这就对岛岸环境建模提出了更高的要求。海洋环境中的各种水文、气象和地理条件的变化对USV的自主航行也会产生至关重要的影响。如何从多个传感器获取的数据中进行有效的信息融合,准确地对岛岸环境进行建模成为一项十分必要

基于多传感器信息融合的无人水面艇岛岸环境建模的任务书.docx
基于多传感器信息融合的无人水面艇岛岸环境建模的任务书任务书任务名称:基于多传感器信息融合的无人水面艇岛岸环境建模任务背景:水面艇在军事、民用等领域有着广泛的应用,其中岛岸环境的建模是其重要的应用之一。传统上,人工测量和记录的方式不能满足对海岛海洋环境的实时、高精度、全面的监测需求。而基于多传感器信息融合的无人水面艇技术可以通过高精度的测量和实时的数据传输,实现对岛岸环境的三维建模,为实现完善的海洋环境监测提供有力手段。任务目标:本任务的目标是基于多传感器信息融合的无人水面艇技术建模分析海洋环境,包括岛岸线