
基于多信息融合的车辆追踪方法、装置及系统.pdf

王秋****哥哥

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多信息融合的车辆追踪方法、装置及系统.pdf
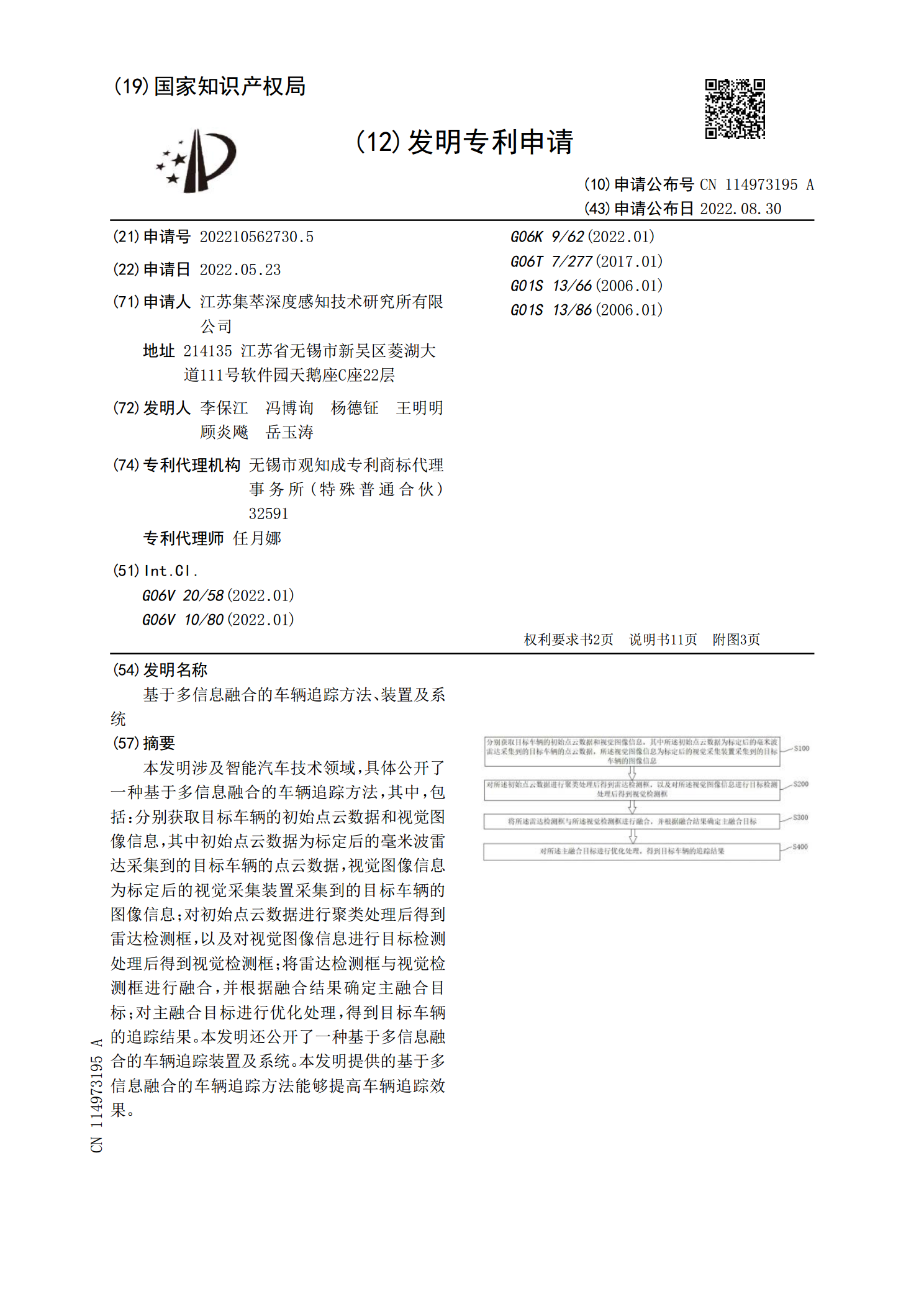
本发明涉及智能汽车技术领域,具体公开了一种基于多信息融合的车辆追踪方法,其中,包括:分别获取目标车辆的初始点云数据和视觉图像信息,其中初始点云数据为标定后的毫米波雷达采集到的目标车辆的点云数据,视觉图像信息为标定后的视觉采集装置采集到的目标车辆的图像信息;对初始点云数据进行聚类处理后得到雷达检测框,以及对视觉图像信息进行目标检测处理后得到视觉检测框;将雷达检测框与视觉检测框进行融合,并根据融合结果确定主融合目标;对主融合目标进行优化处理,得到目标车辆的追踪结果。本发明还公开了一种基于多信息融合的车辆追踪装

基于多特征融合的恶意信息检测方法、装置及系统.pdf
本发明属于网络信息处理领域,具体涉及一种基于多特征融合的恶意信息检测方法、装置及系统;所述方法包括获取社交网络平台的传播信息,得到源文本、评论文本的句子级语义向量和源文本的字符级语义向量;分别得到源文本特征和评论文本特征;进行处理后得到源文本特征检测结果和评论文本特征检测结果;根据用户关系属性,构建出用户节点与其邻居节点之间的信息传播树,按照信息传播树构建出传播子图,对传播子图向量化,得到传播特征;进行处理后得到传播特征检测结果;采用基于时变函数的融合方法对源文本特征检测结果、评论文本特征检测结果与传播特

基于传感信息及目标追踪的多模信息系统及其融合方法.pdf
本发明公开了一种基于传感信息及目标追踪的多模信息系统,其特征在于,包括视觉信息收集模块,非视觉信息收集模块以及信息匹配模块,所述视觉信息收集模块建立在分布式多摄像头网络,它包括摄像头系统节点和检查点摄像头组,所述非视觉信息收集模块包括传感器信息收集,信息匹配模块包括基于跨摄像头人体目标重识别结果模块和多横数据配模块;本发明具有适用范围广泛,可降低后台图像识别处理压力,提供长效历史数据等优点,并可广泛应用于人物追踪,行为挖掘,公共安全等领域。

基于多信息融合的无创血糖检测方法、系统以及装置.pdf
本发明涉及一种基于多信息融合的无创血糖检测方法、系统以及装置。所述无创血糖检测方法,应用于无创血糖检测系统及无创血糖检测装置中,并用于检测被检测者的血糖值。所述无创血糖检测方法基于多信息融合算法计算被检测者的血糖值,其包括步骤:根据被检测者的待测部位对可见光以及红外光的透射能量的比率,计算血糖指标数据;其中,所述血糖指标数据为用于表征血液中的葡萄糖分别对可见光及红外光的不同的吸收率与血糖值之间的相关性的数据;获取被检测者的心率;获取被检测者的体温;获取被检测者的体辐射热量;以及根据所述血糖指标数据、心率、
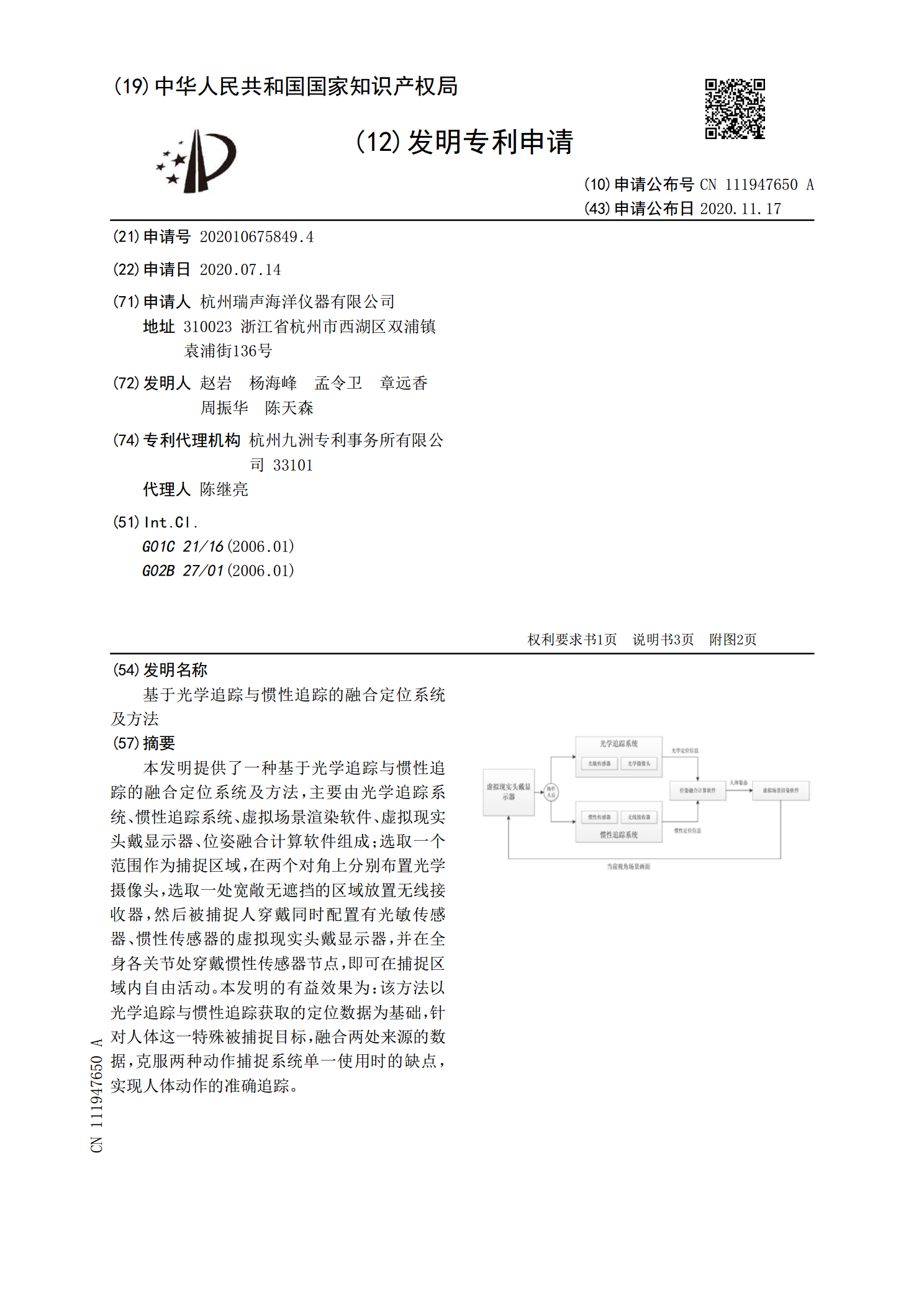
基于光学追踪与惯性追踪的融合定位系统及方法.pdf
本发明提供了一种基于光学追踪与惯性追踪的融合定位系统及方法,主要由光学追踪系统、惯性追踪系统、虚拟场景渲染软件、虚拟现实头戴显示器、位姿融合计算软件组成;选取一个范围作为捕捉区域,在两个对角上分别布置光学摄像头,选取一处宽敞无遮挡的区域放置无线接收器,然后被捕捉人穿戴同时配置有光敏传感器、惯性传感器的虚拟现实头戴显示器,并在全身各关节处穿戴惯性传感器节点,即可在捕捉区域内自由活动。本发明的有益效果为:该方法以光学追踪与惯性追踪获取的定位数据为基础,针对人体这一特殊被捕捉目标,融合两处来源的数据,克服两种动