
一种码垛机械手臂装置.pdf

Ch****91

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种码垛机械手臂装置.pdf
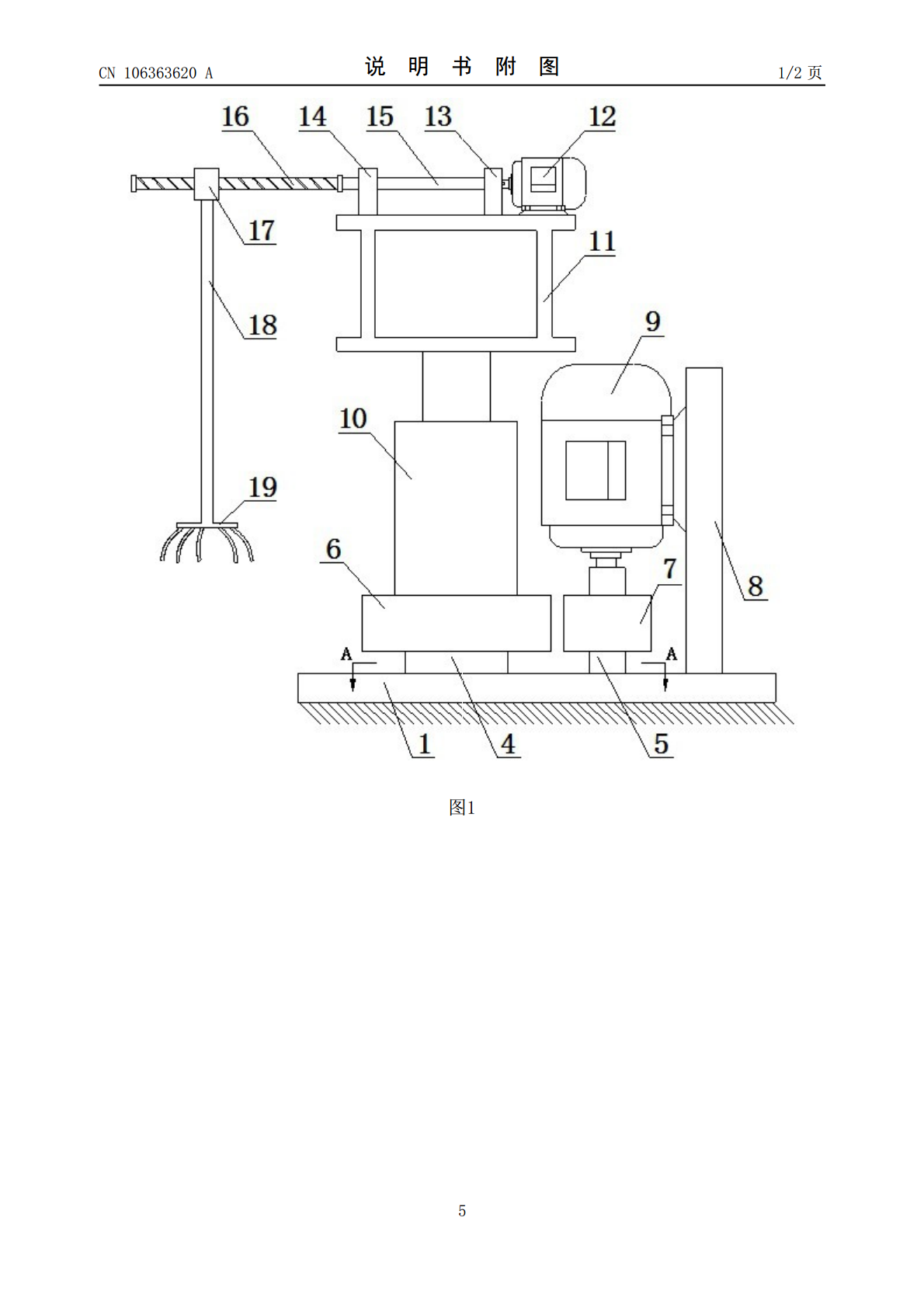
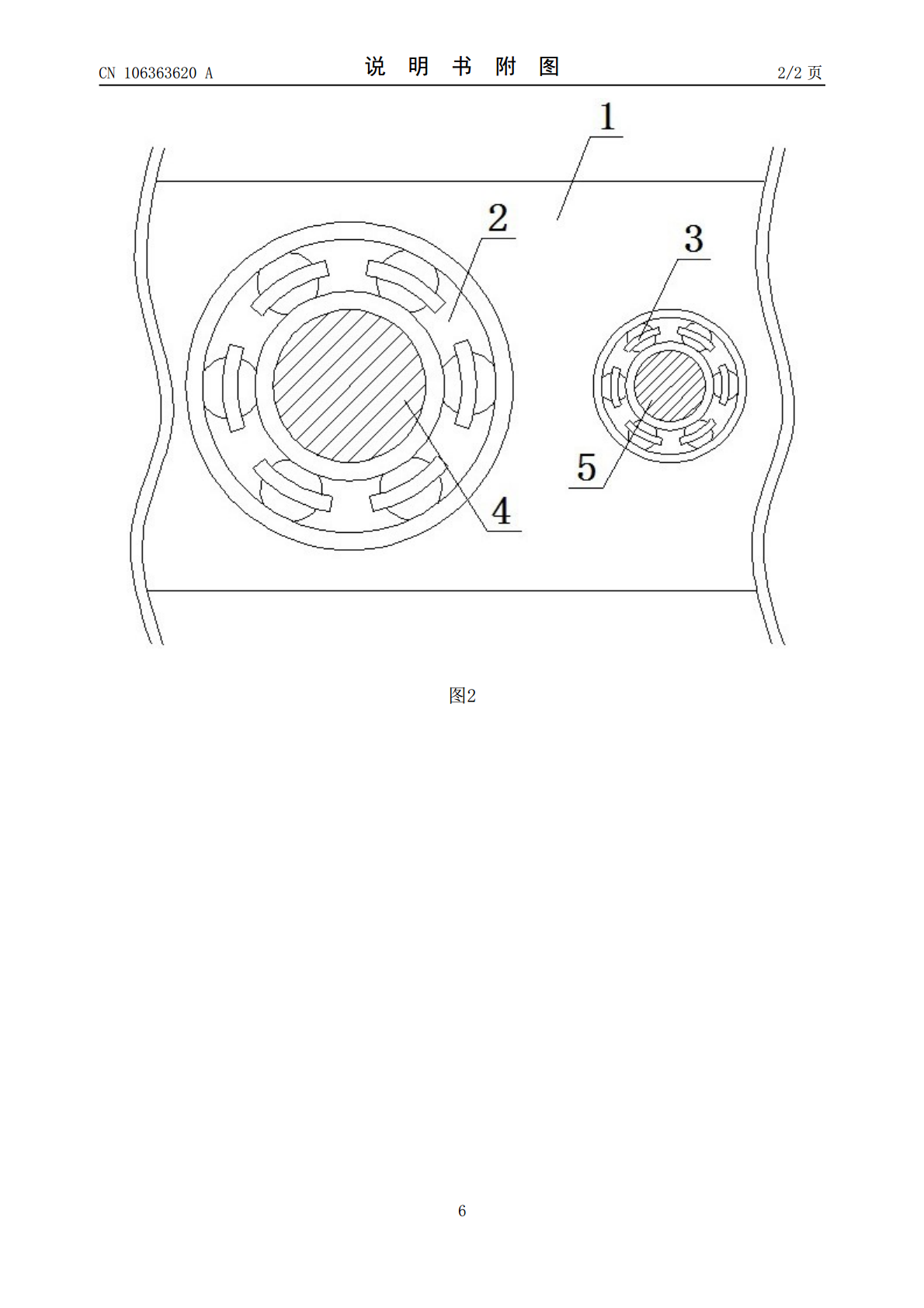
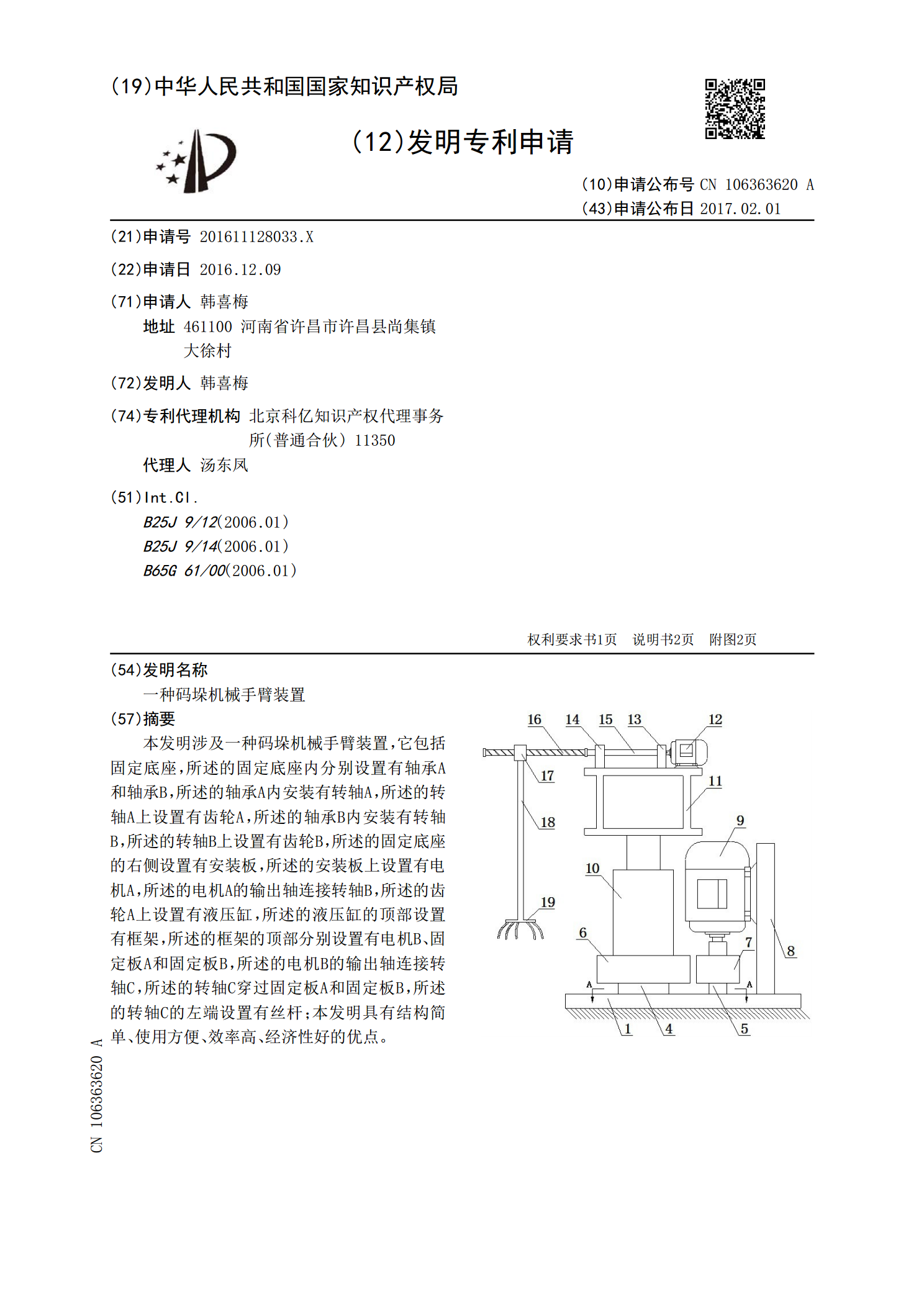
本发明涉及一种码垛机械手臂装置,它包括固定底座,所述的固定底座内分别设置有轴承A和轴承B,所述的轴承A内安装有转轴A,所述的转轴A上设置有齿轮A,所述的轴承B内安装有转轴B,所述的转轴B上设置有齿轮B,所述的固定底座的右侧设置有安装板,所述的安装板上设置有电机A,所述的电机A的输出轴连接转轴B,所述的齿轮A上设置有液压缸,所述的液压缸的顶部设置有框架,所述的框架的顶部分别设置有电机B、固定板A和固定板B,所述的电机B的输出轴连接转轴C,所述的转轴C穿过固定板A和固定板B,所述的转轴C的左端设置有丝杆;本发
一种机械手臂同步控制装置.pdf
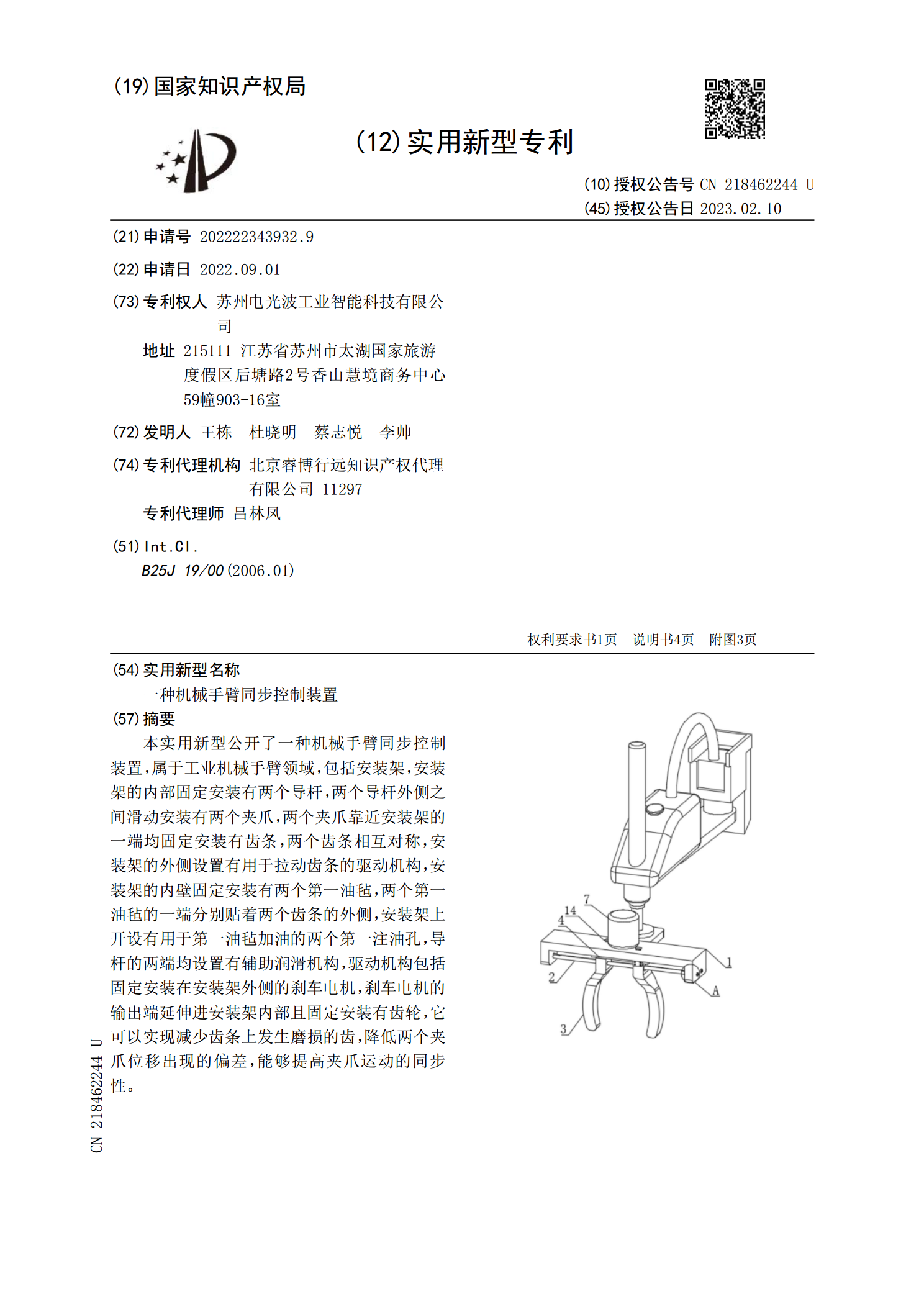
本实用新型公开了一种机械手臂同步控制装置,属于工业机械手臂领域,包括安装架,安装架的内部固定安装有两个导杆,两个导杆外侧之间滑动安装有两个夹爪,两个夹爪靠近安装架的一端均固定安装有齿条,两个齿条相互对称,安装架的外侧设置有用于拉动齿条的驱动机构,安装架的内壁固定安装有两个第一油毡,两个第一油毡的一端分别贴着两个齿条的外侧,安装架上开设有用于第一油毡加油的两个第一注油孔,导杆的两端均设置有辅助润滑机构,驱动机构包括固定安装在安装架外侧的刹车电机,刹车电机的输出端延伸进安装架内部且固定安装有齿轮,它可以实现减

一种机械手臂的教学演示装置.pdf
本发明公开了一种机械手臂的教学演示装置,涉及机电教学技术领域,包括底座和卡爪,所述底座上安装有竖直的固定板,且固定板上安装有齿轮和第二连杆;所述齿轮上固定有第一连杆,且第一连杆和第二连杆共同与卡爪铰接;所述第一连杆、第二连杆、齿轮均为两个,且两个第一连杆、第二连杆、齿轮均相对设置。本发明能有效的对学生的学习进行引导;让学生更深彻学习和了解,引发学生的学习兴趣。
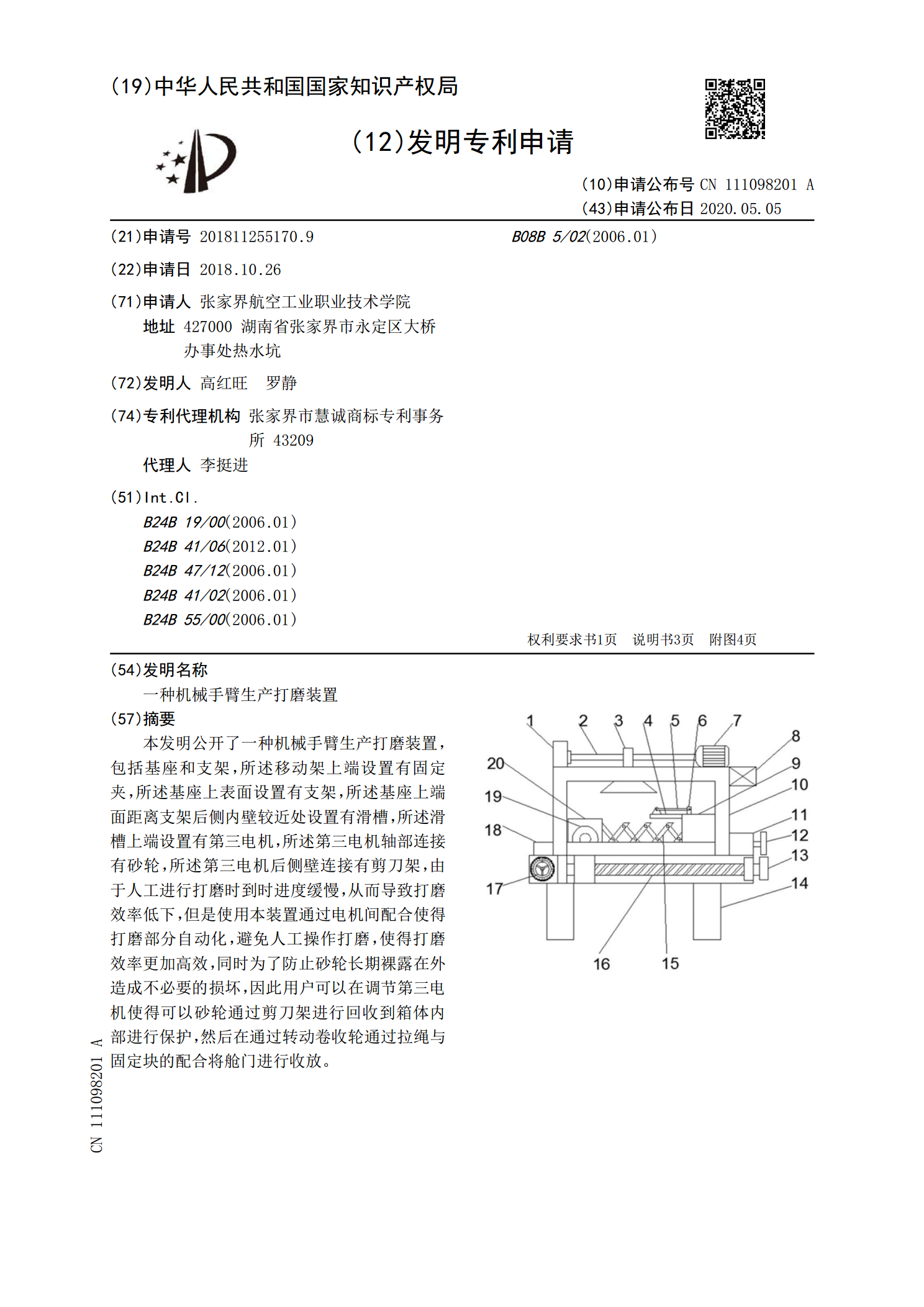
一种机械手臂生产打磨装置.pdf
本发明公开了一种机械手臂生产打磨装置,包括基座和支架,所述移动架上端设置有固定夹,所述基座上表面设置有支架,所述基座上端面距离支架后侧内壁较近处设置有滑槽,所述滑槽上端设置有第三电机,所述第三电机轴部连接有砂轮,所述第三电机后侧壁连接有剪刀架,由于人工进行打磨时到时进度缓慢,从而导致打磨效率低下,但是使用本装置通过电机间配合使得打磨部分自动化,避免人工操作打磨,使得打磨效率更加高效,同时为了防止砂轮长期裸露在外造成不必要的损坏,因此用户可以在调节第三电机使得可以砂轮通过剪刀架进行回收到箱体内部进行保护,然
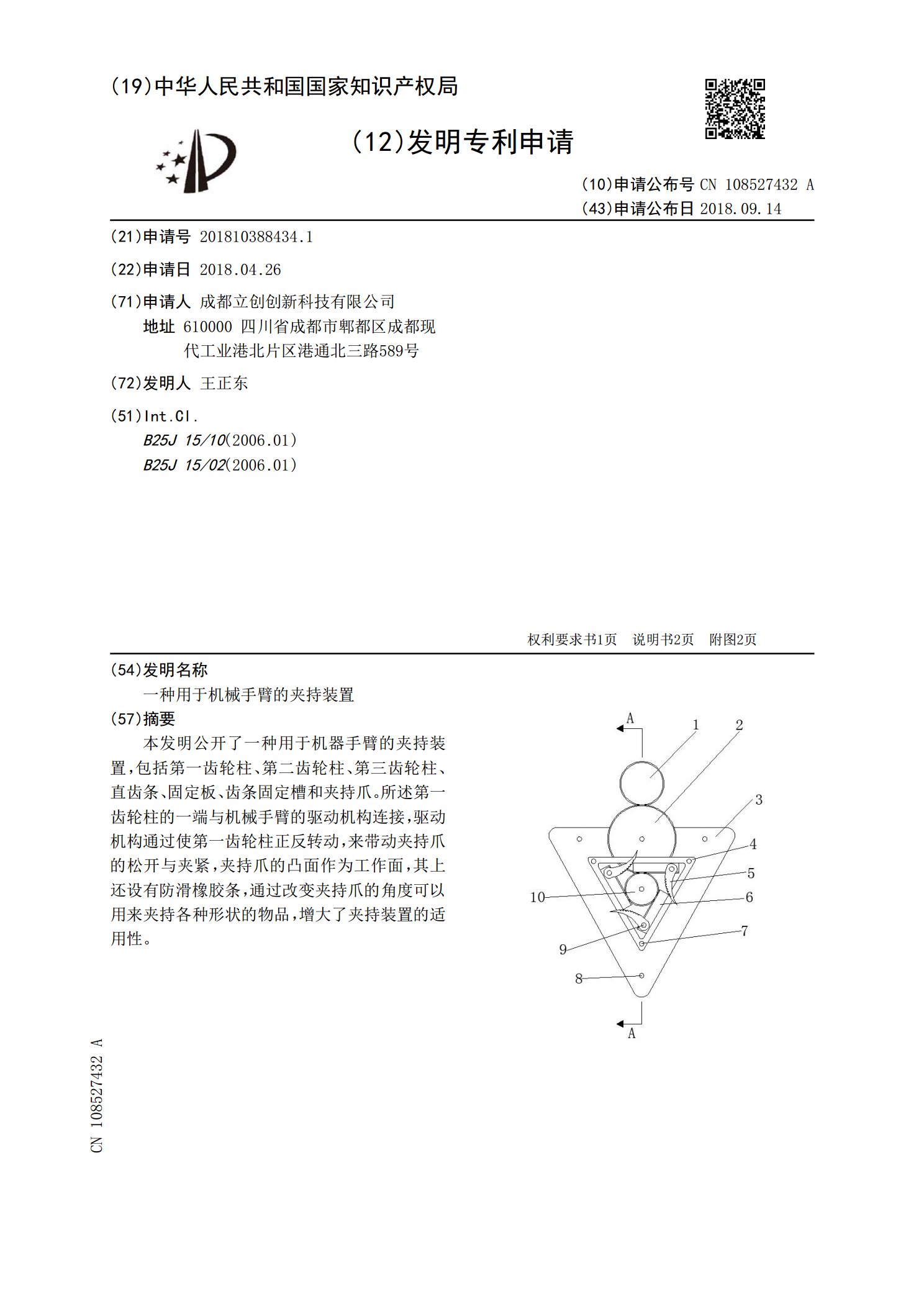
一种用于机械手臂的夹持装置.pdf
本发明公开了一种用于机器手臂的夹持装置,包括第一齿轮柱、第二齿轮柱、第三齿轮柱、直齿条、固定板、齿条固定槽和夹持爪。所述第一齿轮柱的一端与机械手臂的驱动机构连接,驱动机构通过使第一齿轮柱正反转动,来带动夹持爪的松开与夹紧,夹持爪的凸面作为工作面,其上还设有防滑橡胶条,通过改变夹持爪的角度可以用来夹持各种形状的物品,增大了夹持装置的适用性。