
一种高精度机器人手眼相机自动标定的装置及其使用方法.pdf

邻家****文章


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高精度机器人手眼相机自动标定的装置及其使用方法.pdf
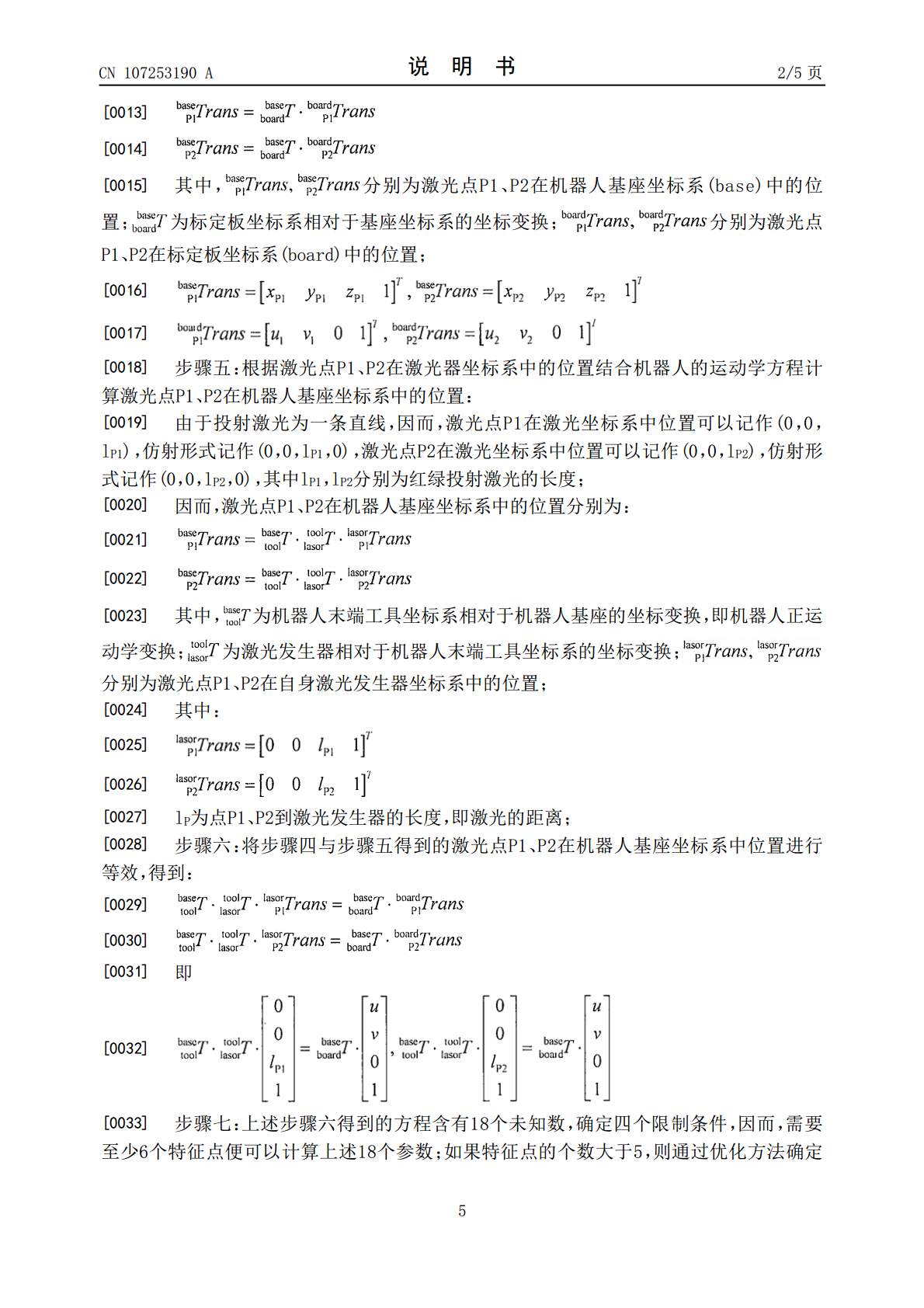
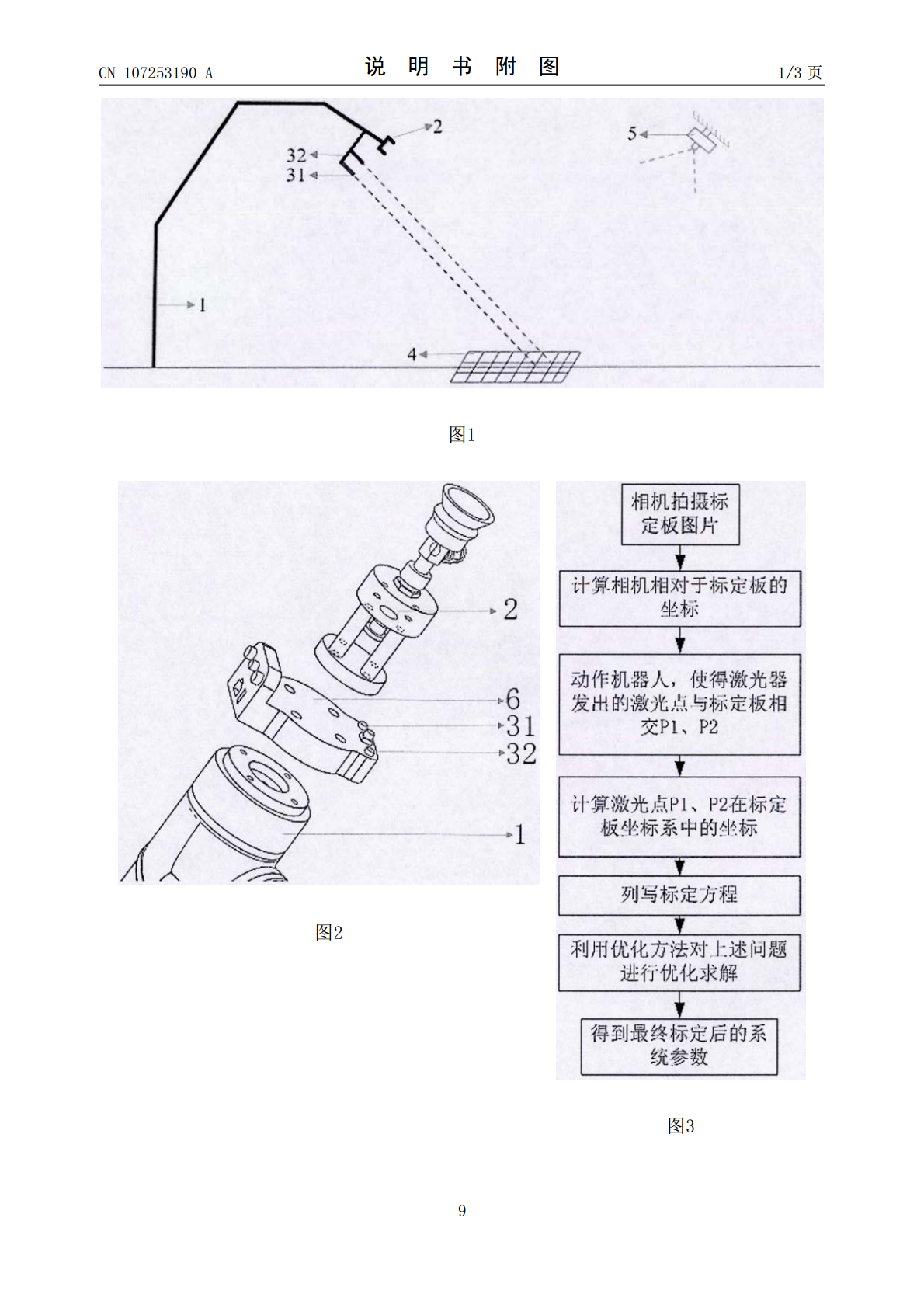
本发明公开了一种高精度机器人手眼相机自动标定的装置,包括工业机器人、机器人末端工具、连接至工业机器人末端工具的激光发生器、标定板和相机,所述工业机器人与连接件的一侧连接,在连接件的另一侧上安装机器人末端工具,在机器人末端工具的一侧安装激光发生器,所述激光发生器包括红色激光发生器和绿色激光发生器,所述标定板为黑白相间的棋盘格,所述相机固定在工作台上,所述相机为2D相机。本发明有效解决了工业机器人手眼相机标定时需要高精度放置标定板以及安装末端工具的问题,同时,本发明无需将标定板放置在精确位置,仅需将标定板放在
一种用于工业机器人手眼相机的自动标定装置及标定方法.pdf
本发明公开了一种用于工业机器人手眼相机的自动标定装置,包括激光发生器、标定板和相机;所述激光发生器设置在机器人末端工具上,机器人末端工具安装在工业机器人上;所述标定板放置在工作台面上,标定板上设置有黑白相间的棋盘格;所述相机固定在工作台面上方,且位于标定板的上方。本发明还公开了基于上述自动标定装置的标定方法。本发明将激光发生器固定在机器人末段工具上,然后通过激光与标定板相交,通过相机提取特征点的位置,最终利用激光特征点在标定板中的位置以及在机器人坐标系中的位置,实现对工业机器人与相机相对位置的标定,极大的

一种机器人手眼标定的方法及装置.pdf
本申请提供一种机器人手眼标定的方法和装置,用于机器人系统中,机器人系统包括机械臂、标定板以及与机械臂基座保持相对固定的全局摄像机;所述标定板固定于所述机械臂末端,所述机械臂末端和所述标定板的相对位置保持不变;所述方法包括:根据多个第一状态下的全局摄像机拍摄的标定板图像,得到机械臂末端在标定板坐标系中的相对位置坐标B;记录多个第二状态下的机械臂末端在机械臂基座坐标系中的位置坐标向量D,并根据标定板坐标系与全局摄像机坐标系之间的第一转换矩阵A

一种结合TCP标定的深度相机手眼标定方法.pptx
一种结合TCP标定的深度相机手眼标定方法目录添加章节标题TCP标定TCP标定方法介绍TCP标定在深度相机手眼标定中的作用TCP标定的实施步骤TCP标定结果的验证深度相机手眼标定深度相机手眼标定方法介绍深度相机手眼标定的原理深度相机手眼标定的实施步骤深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法结合TCP标定的深度相机手眼标定方法的原理结合TCP标定的深度相机手眼标定的实施步骤结合TCP标定的深度相机手眼标定结果的验证结合TCP标定的深度相机手眼标定方法的优势与局限性实验与分析实验设置与数据

补强片自动贴片系统高精度手眼标定方法.docx
补强片自动贴片系统高精度手眼标定方法摘要本文介绍了一种补强片自动贴片系统手眼标定方法,该方法为系统提供了高精度的手眼标定数据。首先对手臂和相机进行标定,然后采用手眼标定方法获取机械臂手端坐标系相对于相机坐标系的转换矩阵,最终实现补强片自动贴片系统的高精度自动化操作。关键词:手眼标定;机械臂;相机;高精度1.简介补强片自动贴片系统自动化程度越来越高,而手眼标定在机器人操作中起着重要的作用。如何提高机器人操作的精度是本方法的研究目标之一。2.系统简介补强片自动贴片系统是由机械臂和相机组成的,机械臂用于精确定位