
一种机器人手眼标定的方法及装置.pdf

一只****爱敏


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人手眼标定的方法及装置.pdf
本申请提供一种机器人手眼标定的方法和装置,用于机器人系统中,机器人系统包括机械臂、标定板以及与机械臂基座保持相对固定的全局摄像机;所述标定板固定于所述机械臂末端,所述机械臂末端和所述标定板的相对位置保持不变;所述方法包括:根据多个第一状态下的全局摄像机拍摄的标定板图像,得到机械臂末端在标定板坐标系中的相对位置坐标B;记录多个第二状态下的机械臂末端在机械臂基座坐标系中的位置坐标向量D,并根据标定板坐标系与全局摄像机坐标系之间的第一转换矩阵A
一种用于工业机器人手眼相机的自动标定装置及标定方法.pdf
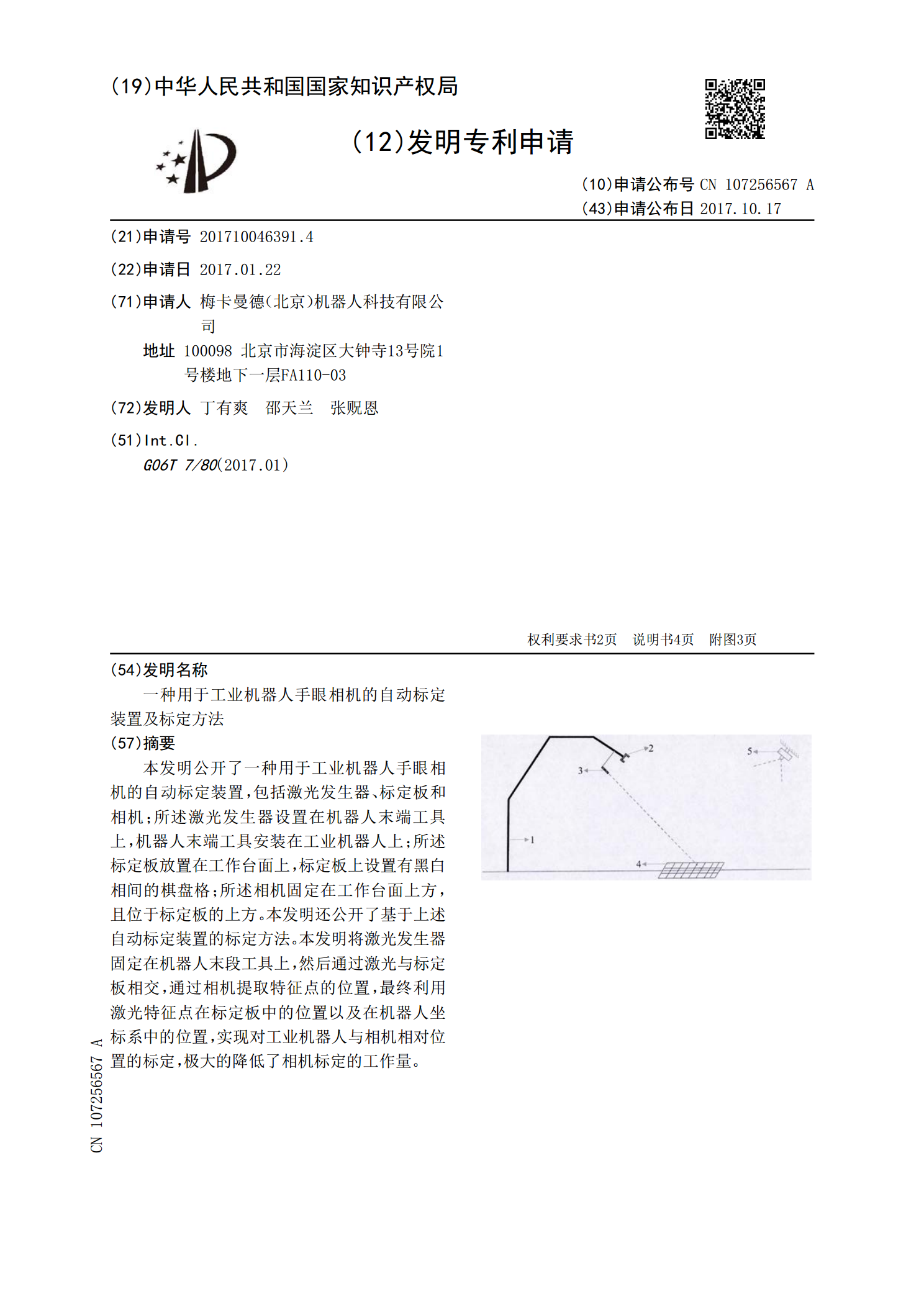
本发明公开了一种用于工业机器人手眼相机的自动标定装置,包括激光发生器、标定板和相机;所述激光发生器设置在机器人末端工具上,机器人末端工具安装在工业机器人上;所述标定板放置在工作台面上,标定板上设置有黑白相间的棋盘格;所述相机固定在工作台面上方,且位于标定板的上方。本发明还公开了基于上述自动标定装置的标定方法。本发明将激光发生器固定在机器人末段工具上,然后通过激光与标定板相交,通过相机提取特征点的位置,最终利用激光特征点在标定板中的位置以及在机器人坐标系中的位置,实现对工业机器人与相机相对位置的标定,极大的

木板抓取机器人手眼标定方法.docx
木板抓取机器人手眼标定方法标题:木板抓取机器人手眼标定方法摘要:随着工业自动化和机器人技术的不断发展,木板抓取机器人在工业生产中扮演着至关重要的角色。然而,由于机器人手和眼的非理想性,使得机器人在实际操作中的准确性和稳定性存在一定的问题。为了解决这一问题,手眼标定方法成为了研究的热点。本论文旨在综述当前常用的木板抓取机器人手眼标定方法,并分析各种方法的优缺点,为进一步改进和发展提供参考。第一章引言1.1研究背景1.2研究目的第二章手眼标定的原理与意义2.1机器人手眼标定的概念2.2手眼标定的意义与应用第三

一种机械臂手眼标定装置及方法.pdf
本发明适用于机器人视觉技术领域,提供了一种机械臂手眼标定装置及方法,装置包括:垂直标定板,垂直标定板由两标定板组成,两标定板垂直固定,两标定板的交线位于标定板的侧边,标定板的表面设有定位点,定位点关于交线对称设立,垂直标定板通过两长度可调节的支撑杆与行架固定;圆盘,圆盘的一侧设有滑块,滑块与滑轨滑动连接,滑轨垂直于行架设置;机械臂设于行架的下方,机械臂的末端装有标定头,机械臂通过底座与模组滑动连接,底座上设有激光雷达,激光雷达位于标定板的下方。标定板设计为垂直状,便于建立工具坐标系,标定板上设计了定位点,

机器人手眼标定位姿选择方法、装置、机器人系统及介质.pdf
本发明公开了一种机器人手眼标定位姿选择方法、装置、机器人系统及介质,该方法包括:控制机器人的操作臂移动到待标定的机器人视觉系统工作空间内的标定板位置,以使相机能够拍摄到标定板上的标定图案;根据手眼标定场景,获取手眼关系;根据摆放在相机与标定板之间的阿基米德体,将阿基米德体上的顶点分布作为可选择标定位置集,所述阿基米德体的形状根据现场的情况与期望采集的数据数量确定;根据可选择标定位置集,参照获取的手眼关系,选择合适高度的位置子集;根据位置子集,计算得到机器人手眼标定位姿数据集。本发明改进了传统手眼标定方法位