
一种光伏清洗机器人使用方法.pdf

邻家****文章


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种光伏清洗机器人使用方法.pdf
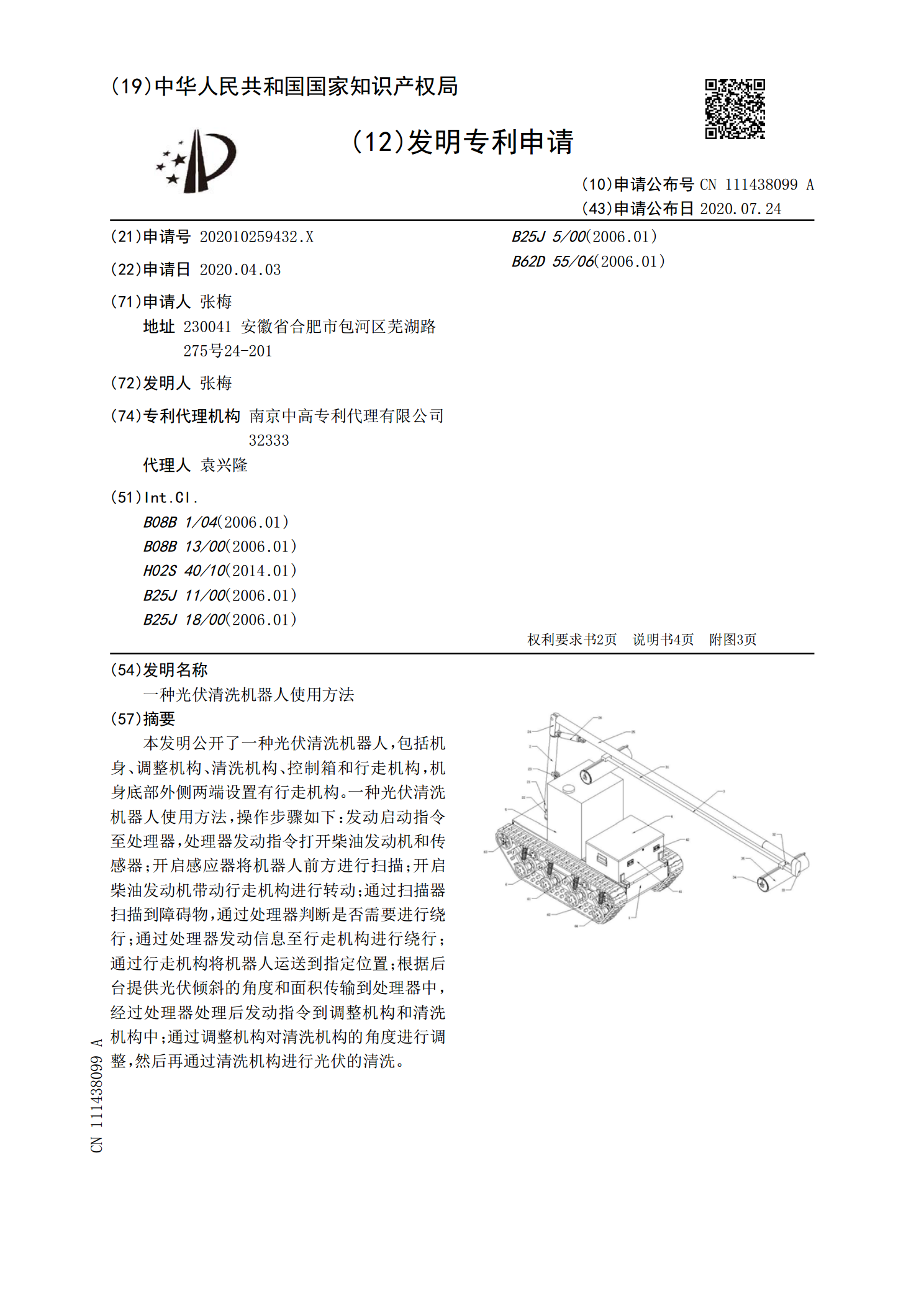
本发明公开了一种光伏清洗机器人,包括机身、调整机构、清洗机构、控制箱和行走机构,机身底部外侧两端设置有行走机构。一种光伏清洗机器人使用方法,操作步骤如下:发动启动指令至处理器,处理器发动指令打开柴油发动机和传感器;开启感应器将机器人前方进行扫描;开启柴油发动机带动行走机构进行转动;通过扫描器扫描到障碍物,通过处理器判断是否需要进行绕行;通过处理器发动信息至行走机构进行绕行;通过行走机构将机器人运送到指定位置;根据后台提供光伏倾斜的角度和面积传输到处理器中,经过处理器处理后发动指令到调整机构和清洗机构中;通
一种光伏清洗机器人.pdf
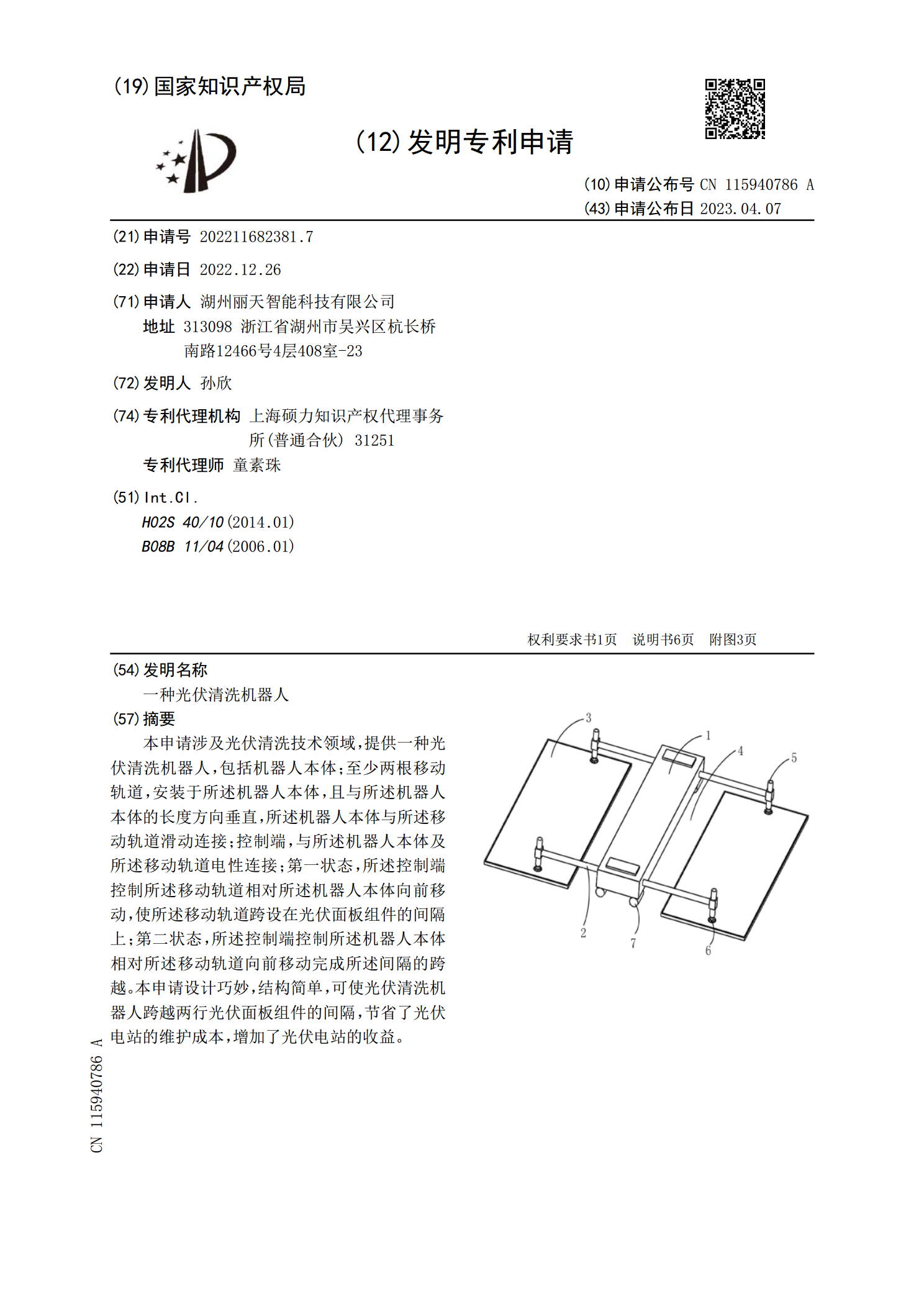
本申请涉及光伏清洗技术领域,提供一种光伏清洗机器人,包括机器人本体;至少两根移动轨道,安装于所述机器人本体,且与所述机器人本体的长度方向垂直,所述机器人本体与所述移动轨道滑动连接;控制端,与所述机器人本体及所述移动轨道电性连接;第一状态,所述控制端控制所述移动轨道相对所述机器人本体向前移动,使所述移动轨道跨设在光伏面板组件的间隔上;第二状态,所述控制端控制所述机器人本体相对所述移动轨道向前移动完成所述间隔的跨越。本申请设计巧妙,结构简单,可使光伏清洗机器人跨越两行光伏面板组件的间隔,节省了光伏电站的维护成

一种光伏面板清洗机器人.pdf
本发明公开了一种光伏面板清洗机器人,包括底盘、安装在底盘上的一对转向轮、一对万向轮和扶手,还包括回转装置、调整装置、清洗装置、供水装置和控制装置。所述回转装置包括固定安装在底盘上的回转支撑、工作台、和回转电机和回转齿轮等部件;所述调整装置包括升降部、旋转部和伸缩部;所述清洗装置包括移动部、喷淋部和第一清洗部和第二清洗部;所述供水装置包括水箱、设在水箱上回收槽和水泵等部件;所述控制装置包括单片机和控制面板。发明能够对光伏面板进行快速清洗,尤其在处理光伏电站这种光伏面板大量集中的情况,该特点更加明显。
一种光伏板清洗机器人用清洗刷.pdf
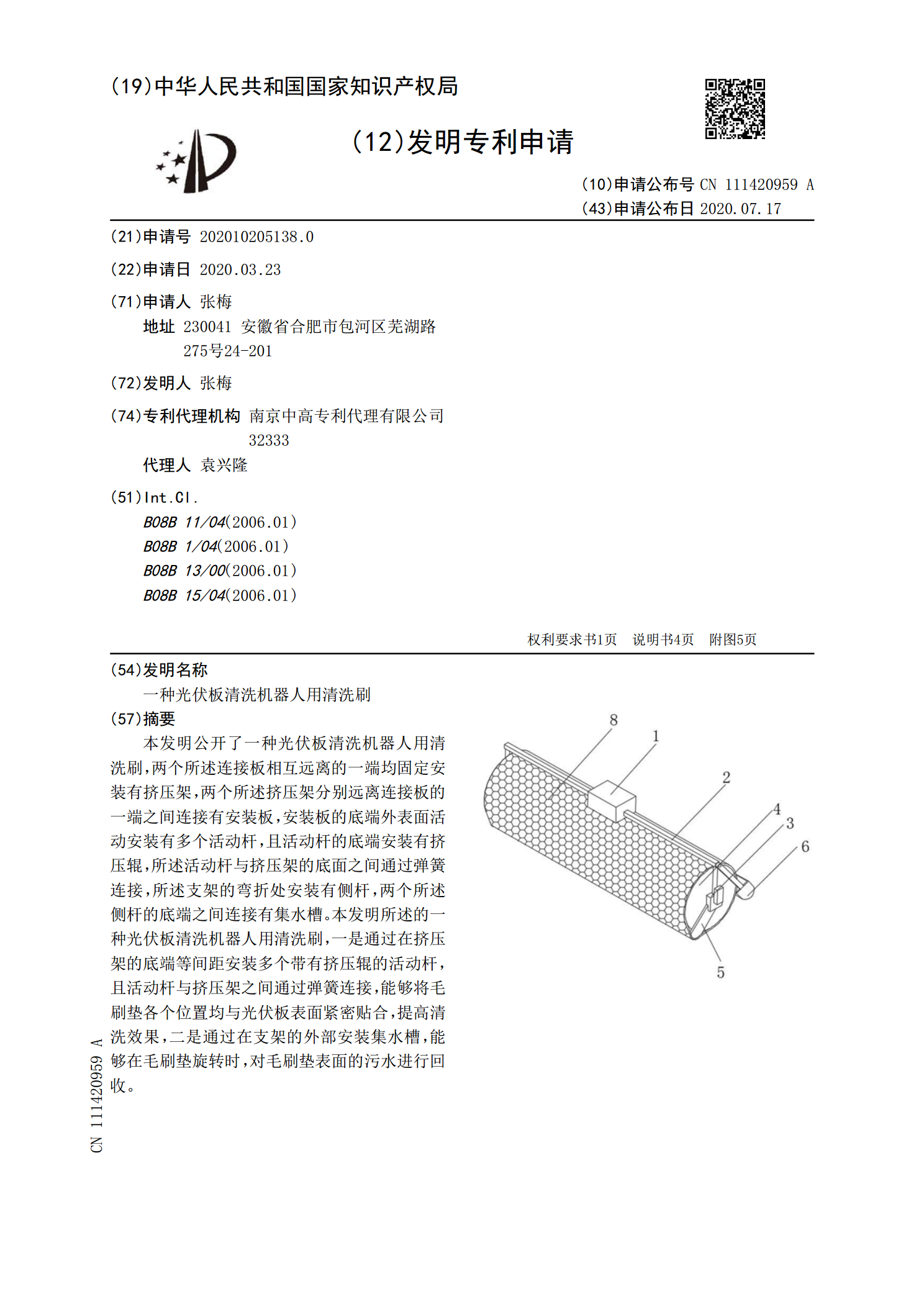
本发明公开了一种光伏板清洗机器人用清洗刷,两个所述连接板相互远离的一端均固定安装有挤压架,两个所述挤压架分别远离连接板的一端之间连接有安装板,安装板的底端外表面活动安装有多个活动杆,且活动杆的底端安装有挤压辊,所述活动杆与挤压架的底面之间通过弹簧连接,所述支架的弯折处安装有侧杆,两个所述侧杆的底端之间连接有集水槽。本发明所述的一种光伏板清洗机器人用清洗刷,一是通过在挤压架的底端等间距安装多个带有挤压辊的活动杆,且活动杆与挤压架之间通过弹簧连接,能够将毛刷垫各个位置均与光伏板表面紧密贴合,提高清洗效果,二是
一种新能源智能驾驶光伏清洗机器人.pdf
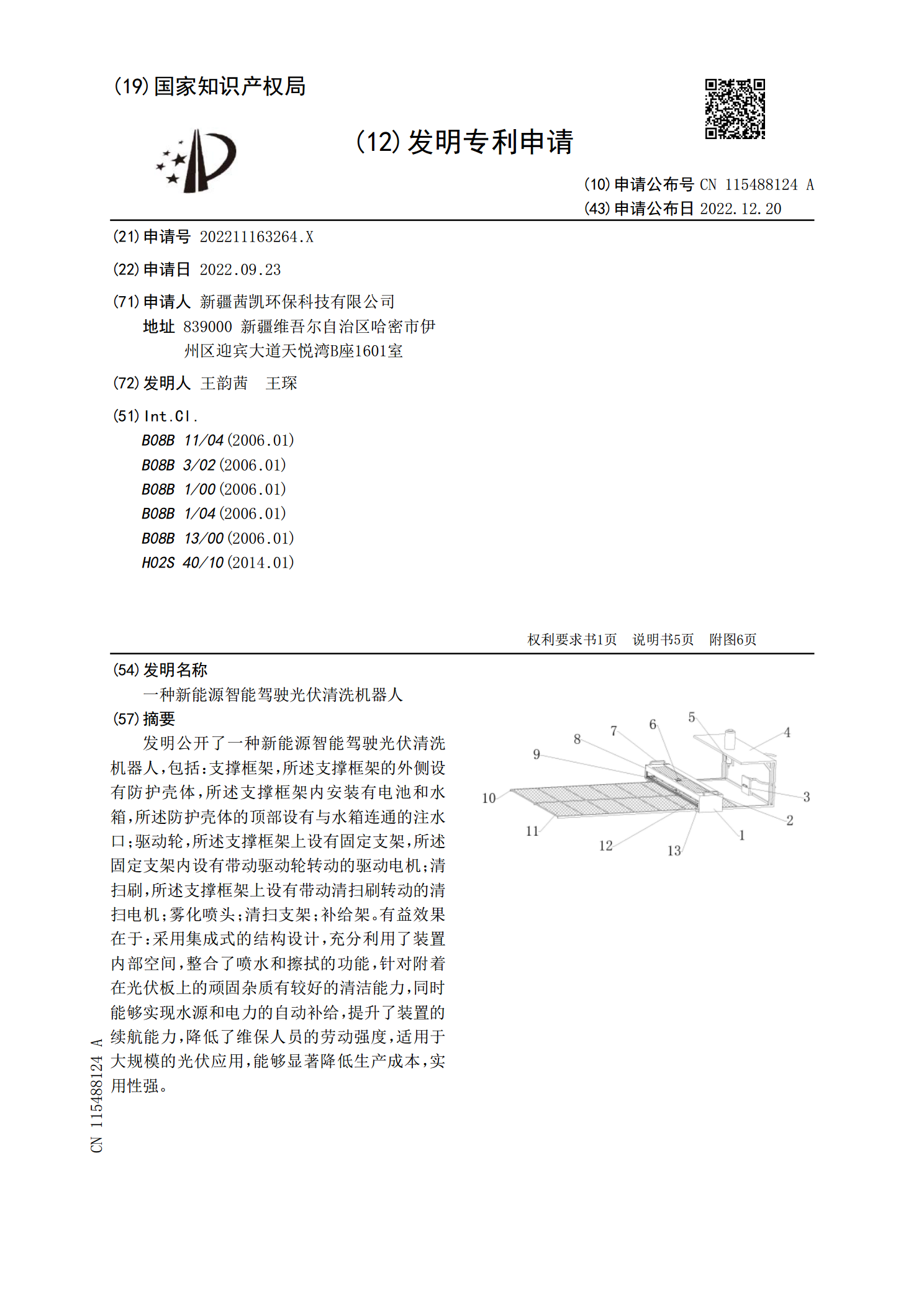
发明公开了一种新能源智能驾驶光伏清洗机器人,包括:支撑框架,所述支撑框架的外侧设有防护壳体,所述支撑框架内安装有电池和水箱,所述防护壳体的顶部设有与水箱连通的注水口;驱动轮,所述支撑框架上设有固定支架,所述固定支架内设有带动驱动轮转动的驱动电机;清扫刷,所述支撑框架上设有带动清扫刷转动的清扫电机;雾化喷头;清扫支架;补给架。有益效果在于:采用集成式的结构设计,充分利用了装置内部空间,整合了喷水和擦拭的功能,针对附着在光伏板上的顽固杂质有较好的清洁能力,同时能够实现水源和电力的自动补给,提升了装置的续航能力