
基于移动端单目和IMU融合的稳定运动跟踪方法和装置.pdf

是湛****21

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于移动端单目和IMU融合的稳定运动跟踪方法和装置.pdf
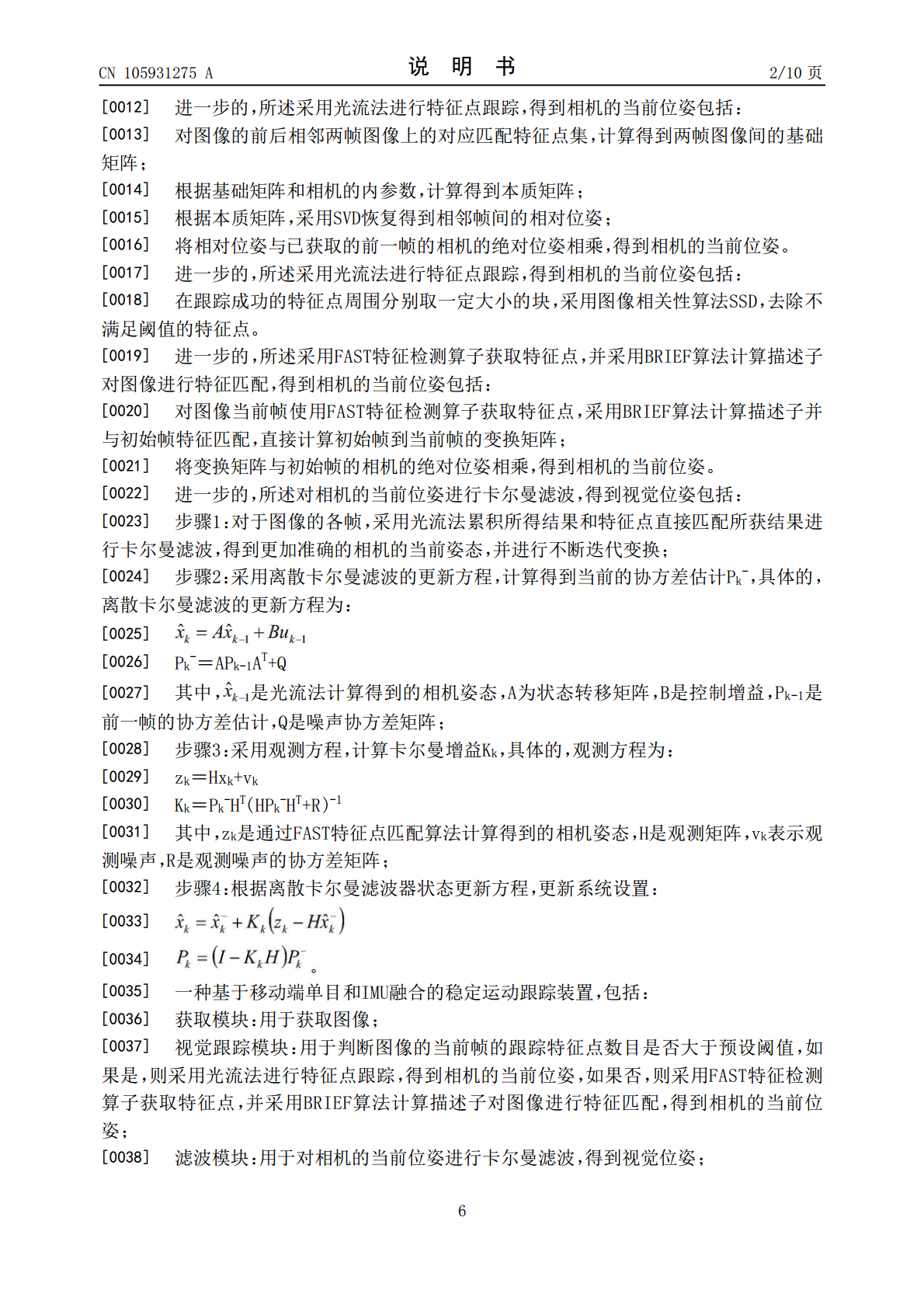
本发明公开了一种基于移动端单目和IMU融合的稳定运动跟踪方法和装置,属于AR/VR运动跟踪技术领域,所述方法包括:判断图像的当前帧的跟踪特征点数目是否大于预设阈值,如果是,则采用光流法进行特征点跟踪,得到相机的当前位姿,如果否,则采用FAST特征检测算子获取特征点,并采用BRIEF算法计算描述子对图像进行特征匹配,得到相机的当前位姿;对相机的当前位姿进行卡尔曼滤波,得到视觉位姿;获取IMU在三维空间产生的加速度和角速度值,并对加速度和角速度值进行积分运算,得到IMU位姿;对视觉位姿和IMU位姿进行卡尔曼融

基于图优化和EKF框架下融合单目视觉和IMU的SLAM方法及系统.pdf
本发明提供基于图优化和EKF框架下融合单目视觉和IMU的SLAM方法及系统,方法包括:通过相机和惯性测量单元IMU分别采集图像及惯性数据,并将图像及惯性数据送入预置频率参数的单目REKF‑VIO系统;对单目REKF‑VIO系统执行状态预测、更新以及状态扩充操作,以估计当前帧的状态后验均值和系统协方差;初始化单目REKF‑VIO系统,以构建初始全局地图的初始地图点;根据初始地图点进行筛选处理,据以得到视觉关键帧;根据视觉关键帧,利用图优化及EKF互补框架获取优化全局地图以及运动状态信息;将运动估计信息送入优

一种基于单目视觉里程计和IMU融合的定位方法.pdf
本发明公开了一种基于单目视觉里程计和IMU融合的定位方法,包括以下步骤:S1:采集图像信息并传输至机器人主控系统,对图像进行特征点处理;S2:获取IMU的三轴加速度和三轴角速度,进行处理得到IMU数据,并传输至机器人主控系统;S3:利用机器人主控系统进行特征点匹配,得到视觉里程计数据;S4:对IMU数据和视觉里程计数据进行融合,得到融合后的机器人位姿;S5:对发生回环的机器人位姿进行重定位。本发明的定位方法使用滤波思想进行多传感器数据的融合来进一步优化定位信息,将IMU与单目视觉里程计结合起来,克服相互的
基于单目相机重建的虚实融合渲染方法及装置.pdf
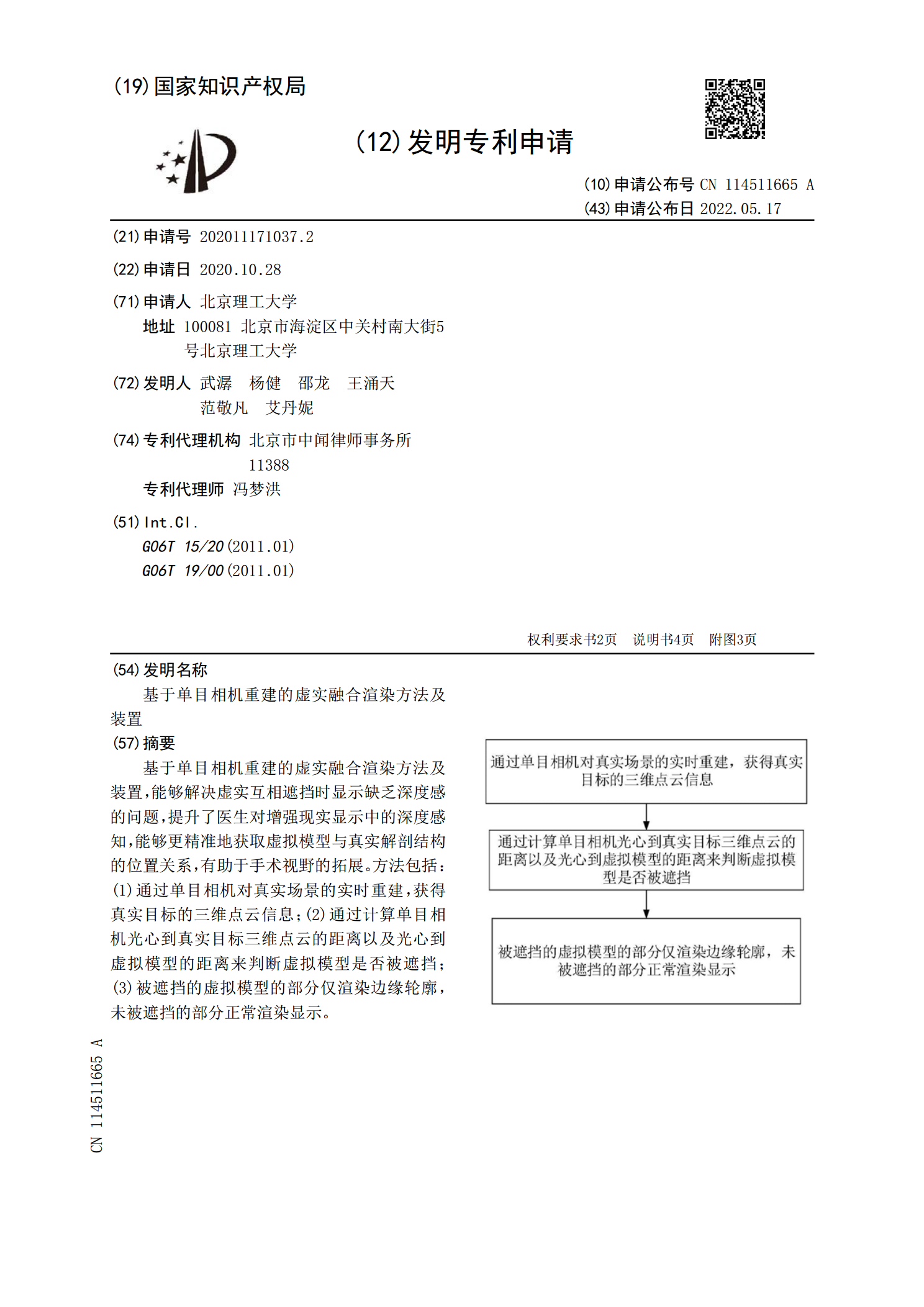
基于单目相机重建的虚实融合渲染方法及装置,能够解决虚实互相遮挡时显示缺乏深度感的问题,提升了医生对增强现实显示中的深度感知,能够更精准地获取虚拟模型与真实解剖结构的位置关系,有助于手术视野的拓展。方法包括:(1)通过单目相机对真实场景的实时重建,获得真实目标的三维点云信息;(2)通过计算单目相机光心到真实目标三维点云的距离以及光心到虚拟模型的距离来判断虚拟模型是否被遮挡;(3)被遮挡的虚拟模型的部分仅渲染边缘轮廓,未被遮挡的部分正常渲染显示。

基于GPS、IMU和轮速传感器信号的车速融合估计方法及装置.pdf
本申请公开了一种基于GPS、IMU和轮速传感器信号的车速融合估计方法及装置,引入其他系统估计的道路纵向坡度值,对车辆纵向加速度进行补偿并滤波,采用转向补偿、最大最小轮速法、改进的动态斜率法构建三层架构轮速处理算法实现轮速高鲁棒性处理,基于运动学原理,将轮速处理算法输出的车速作为IMU卡尔曼滤波的测量值,并对测量噪声进行合理建模,实现车速自适应估计;对于GPS信号,通过坐标转换将导航坐标系下的信号转换到车体坐标系下,并对噪声进行建模,进而采用卡尔曼滤波算法处理;最后,基于多传感器卡尔曼滤波最优融合理论对GP