
基于GPS、IMU和轮速传感器信号的车速融合估计方法及装置.pdf

一条****涛k

1/10
2/10
3/10
4/10
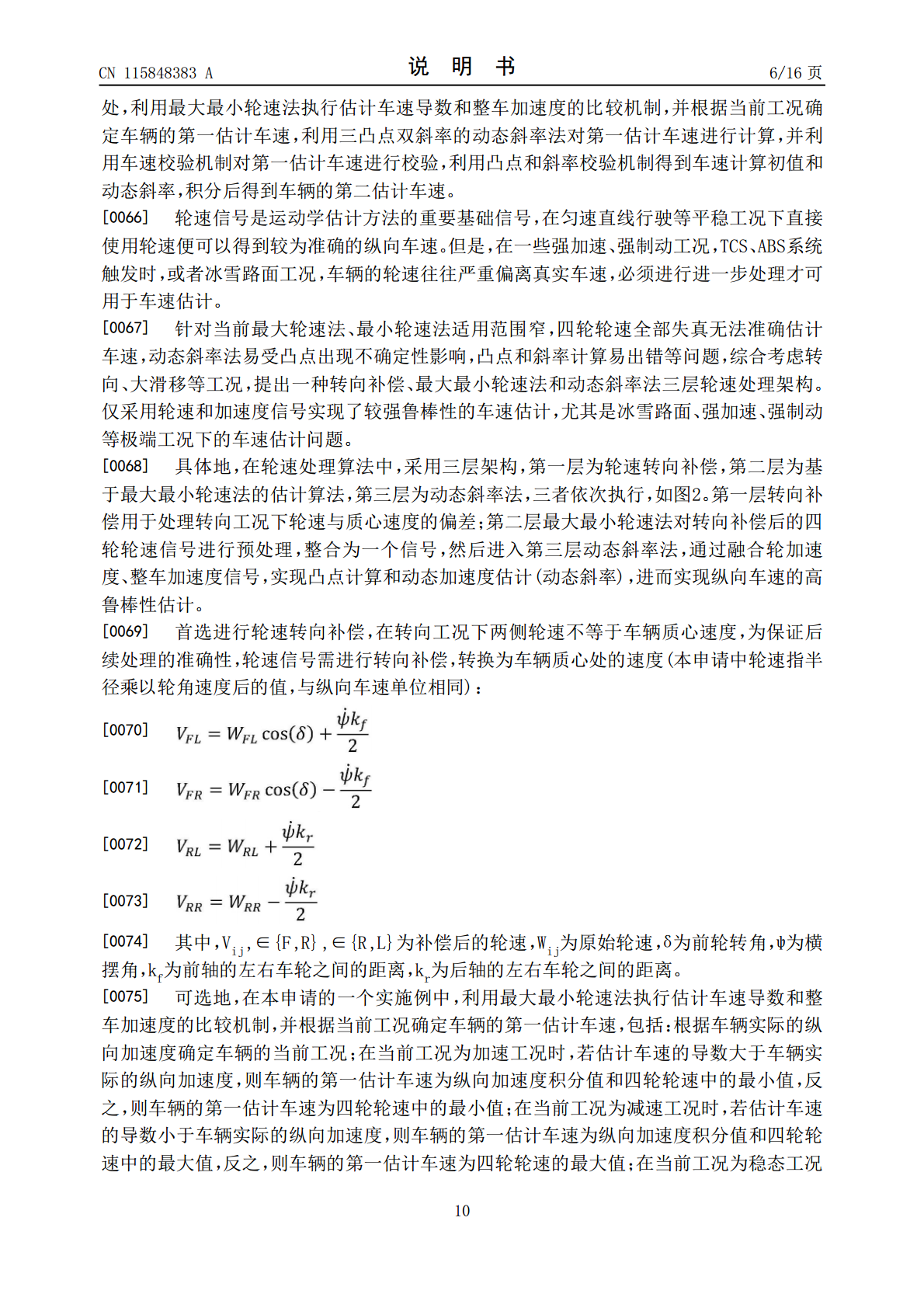
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于GPS、IMU和轮速传感器信号的车速融合估计方法及装置.pdf
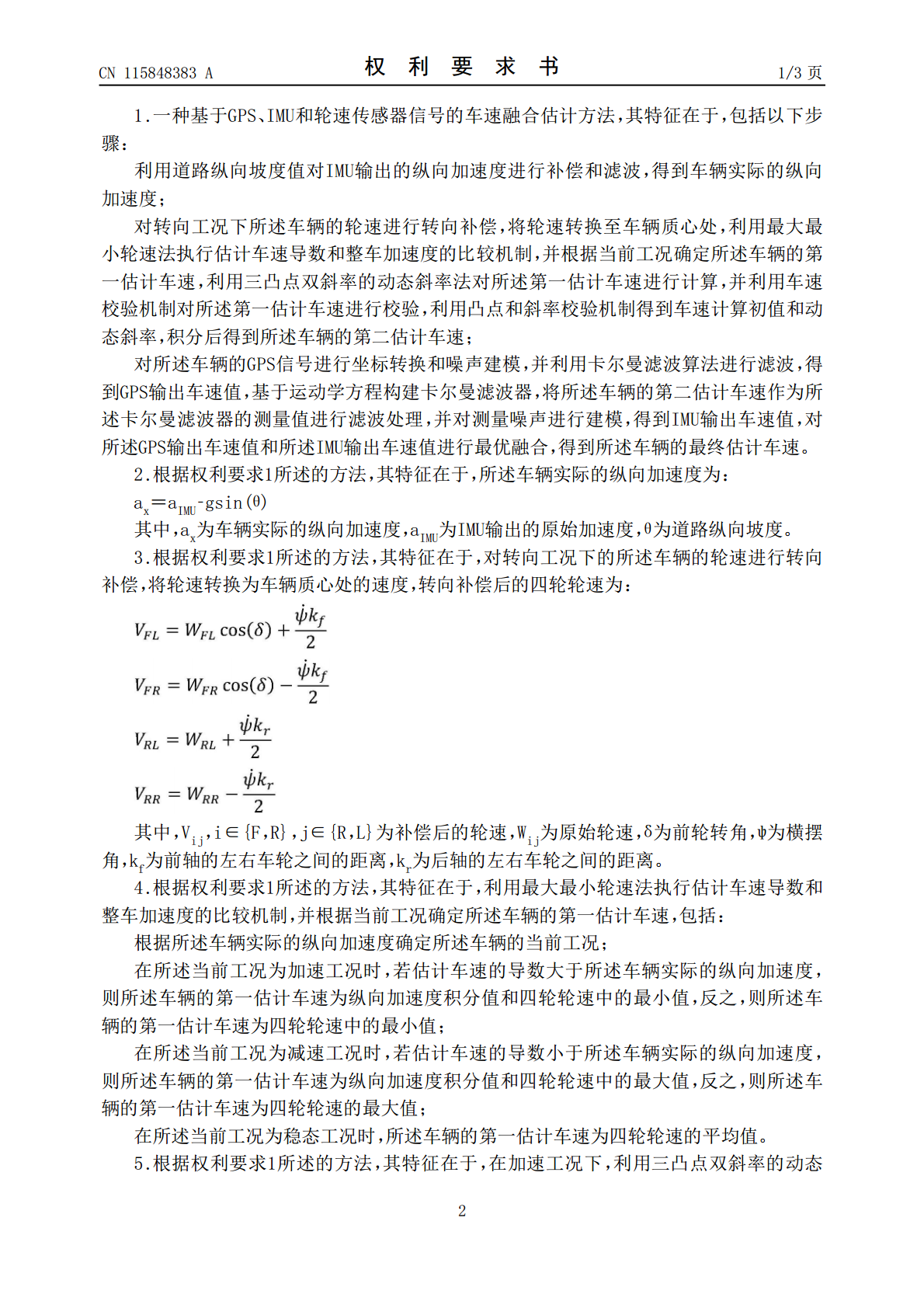
本申请公开了一种基于GPS、IMU和轮速传感器信号的车速融合估计方法及装置,引入其他系统估计的道路纵向坡度值,对车辆纵向加速度进行补偿并滤波,采用转向补偿、最大最小轮速法、改进的动态斜率法构建三层架构轮速处理算法实现轮速高鲁棒性处理,基于运动学原理,将轮速处理算法输出的车速作为IMU卡尔曼滤波的测量值,并对测量噪声进行合理建模,实现车速自适应估计;对于GPS信号,通过坐标转换将导航坐标系下的信号转换到车体坐标系下,并对噪声进行建模,进而采用卡尔曼滤波算法处理;最后,基于多传感器卡尔曼滤波最优融合理论对GP
基于轮速传感器计算车速的方法.pdf
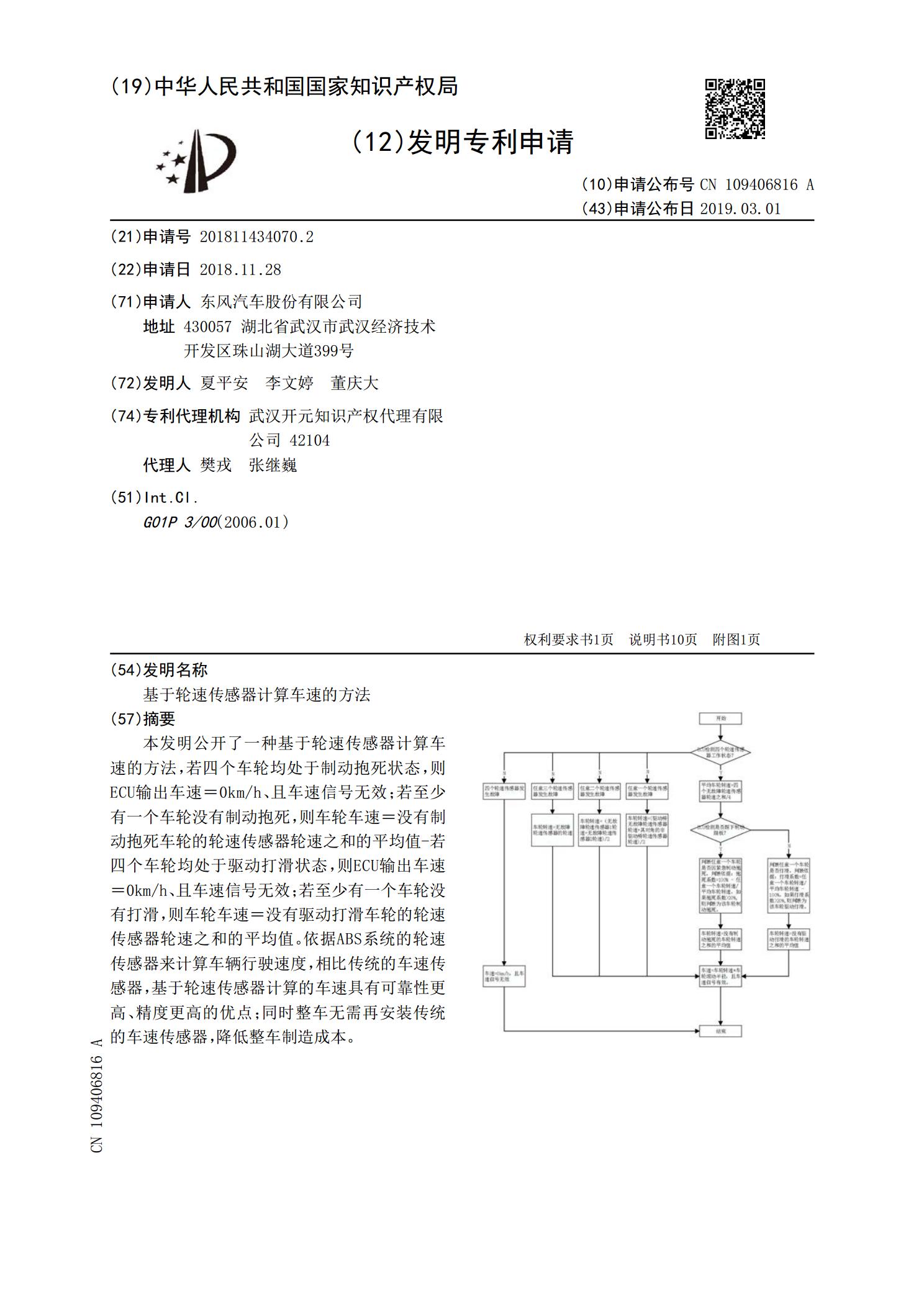
本发明公开了一种基于轮速传感器计算车速的方法,若四个车轮均处于制动抱死状态,则ECU输出车速=0km/h、且车速信号无效;若至少有一个车轮没有制动抱死,则车轮车速=没有制动抱死车轮的轮速传感器轮速之和的平均值‑若四个车轮均处于驱动打滑状态,则ECU输出车速=0km/h、且车速信号无效;若至少有一个车轮没有打滑,则车轮车速=没有驱动打滑车轮的轮速传感器轮速之和的平均值。依据ABS系统的轮速传感器来计算车辆行驶速度,相比传统的车速传感器,基于轮速传感器计算的车速具有可靠性更高、精度更高的优点;同时整车无需再安
编解码轮速传感器信号的装置和传送编码轮速传感器信号的方法.pdf
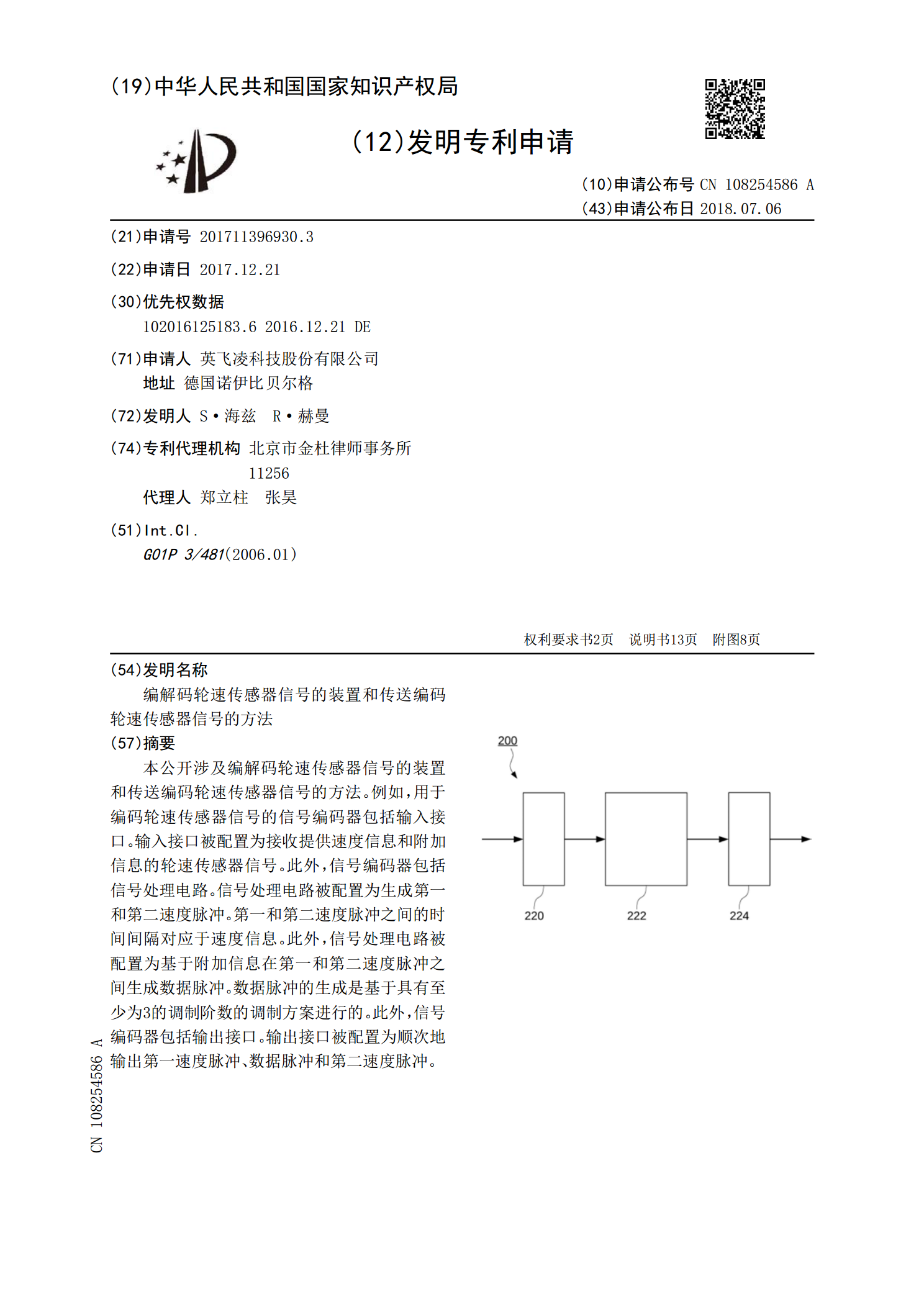
本公开涉及编解码轮速传感器信号的装置和传送编码轮速传感器信号的方法。例如,用于编码轮速传感器信号的信号编码器包括输入接口。输入接口被配置为接收提供速度信息和附加信息的轮速传感器信号。此外,信号编码器包括信号处理电路。信号处理电路被配置为生成第一和第二速度脉冲。第一和第二速度脉冲之间的时间间隔对应于速度信息。此外,信号处理电路被配置为基于附加信息在第一和第二速度脉冲之间生成数据脉冲。数据脉冲的生成是基于具有至少为3的调制阶数的调制方案进行的。此外,信号编码器包括输出接口。输出接口被配置为顺次地输出第一速度脉
基于粒子滤波和多传感器信息融合的列车速度估计方法.pdf
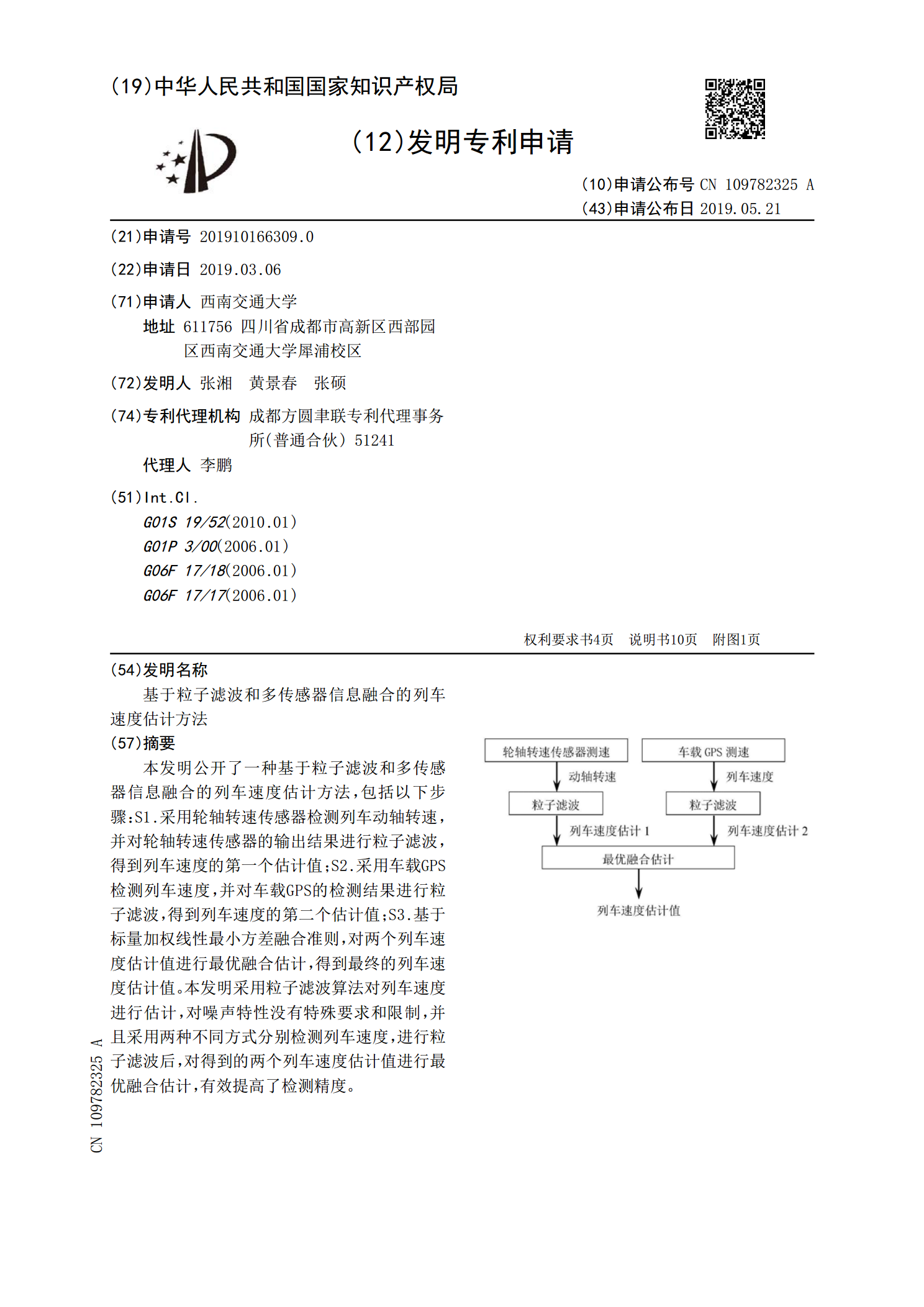
本发明公开了一种基于粒子滤波和多传感器信息融合的列车速度估计方法,包括以下步骤:S1.采用轮轴转速传感器检测列车动轴转速,并对轮轴转速传感器的输出结果进行粒子滤波,得到列车速度的第一个估计值;S2.采用车载GPS检测列车速度,并对车载GPS的检测结果进行粒子滤波,得到列车速度的第二个估计值;S3.基于标量加权线性最小方差融合准则,对两个列车速度估计值进行最优融合估计,得到最终的列车速度估计值。本发明采用粒子滤波算法对列车速度进行估计,对噪声特性没有特殊要求和限制,并且采用两种不同方式分别检测列车速度,进行

轮速传感器的信号处理装置.pdf
本发明涉及一种轮速传感器的信号处理装置,其对输入至轮速传感器的电流进行双重监测,该装置防止过电流被供给到轮速传感器来监测输入至轮速传感器的电流。本发明的轮速传感器的信号处理装置包括接收轮速传感器的检测信号的传感器输入端和判断信号是否正常的正常判断块。