
一种柔性可穿戴下肢助力外骨骼服.pdf

葫芦****io


1/9
2/9

3/9

4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种柔性可穿戴下肢助力外骨骼服.pdf
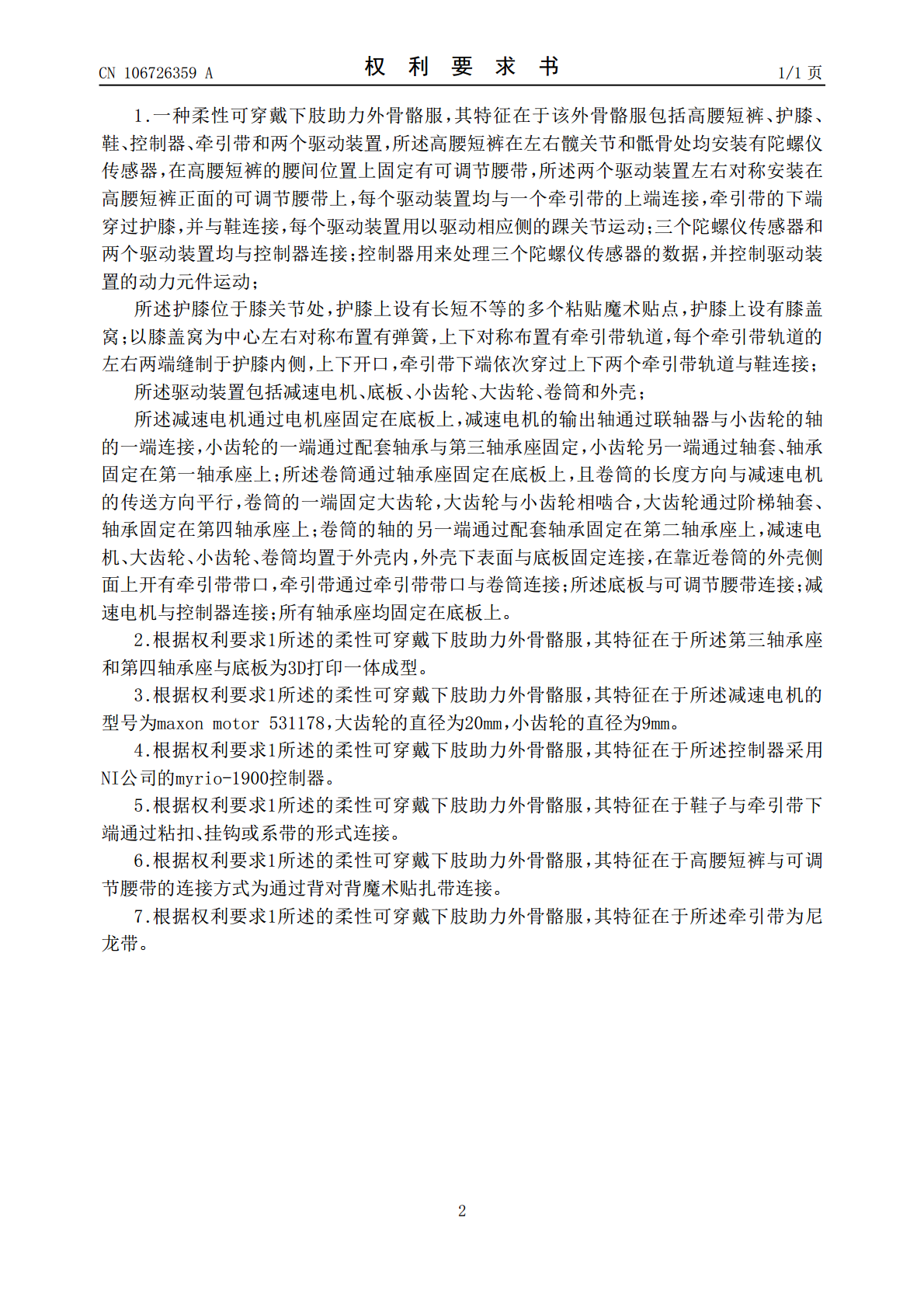
本发明一种柔性可穿戴下肢助力外骨骼服,其特征在于该外骨骼服包括高腰短裤、护膝、鞋、控制器、牵引带和两个驱动装置,所述高腰短裤在左右髋关节和骶骨处均安装有陀螺仪传感器,在高腰短裤的腰间位置上固定有可调节腰带,所述两个驱动装置左右对称安装在高腰短裤正面的可调节腰带上,每个驱动装置均与一个牵引带的上端连接,牵引带的下端穿过护膝,并与鞋连接,每个驱动装置用以驱动相应侧的踝关节运动;三个陀螺仪传感器和两个驱动装置均与控制器连接;控制器用来处理三个陀螺仪传感器的数据,并控制驱动装置的动力元件运动,所述护膝位于膝关节处
一种可穿戴全身型柔性助力外骨骼装置.pdf
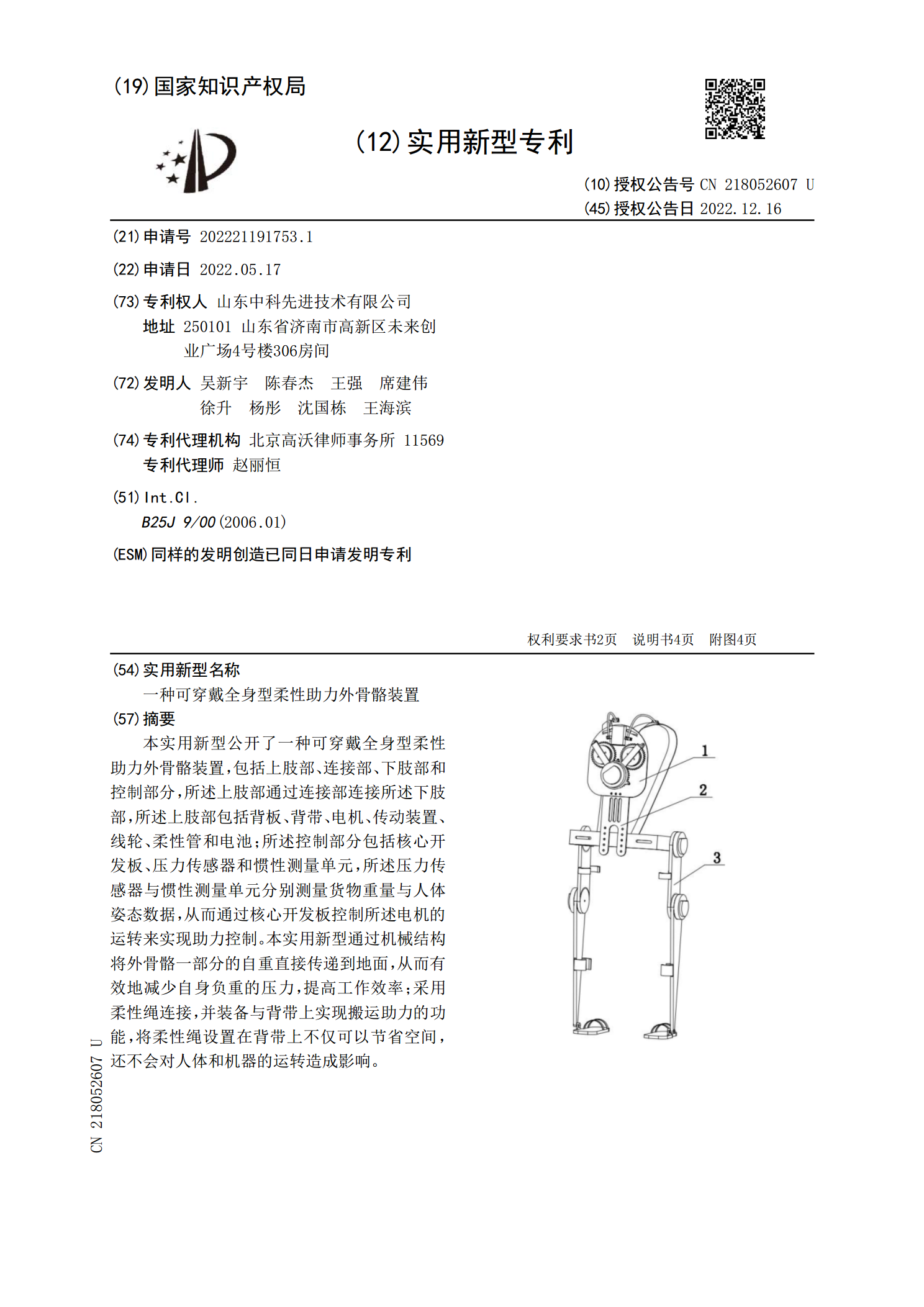
本实用新型公开了一种可穿戴全身型柔性助力外骨骼装置,包括上肢部、连接部、下肢部和控制部分,所述上肢部通过连接部连接所述下肢部,所述上肢部包括背板、背带、电机、传动装置、线轮、柔性管和电池;所述控制部分包括核心开发板、压力传感器和惯性测量单元,所述压力传感器与惯性测量单元分别测量货物重量与人体姿态数据,从而通过核心开发板控制所述电机的运转来实现助力控制。本实用新型通过机械结构将外骨骼一部分的自重直接传递到地面,从而有效地减少自身负重的压力,提高工作效率;采用柔性绳连接,并装备与背带上实现搬运助力的功能,将柔
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
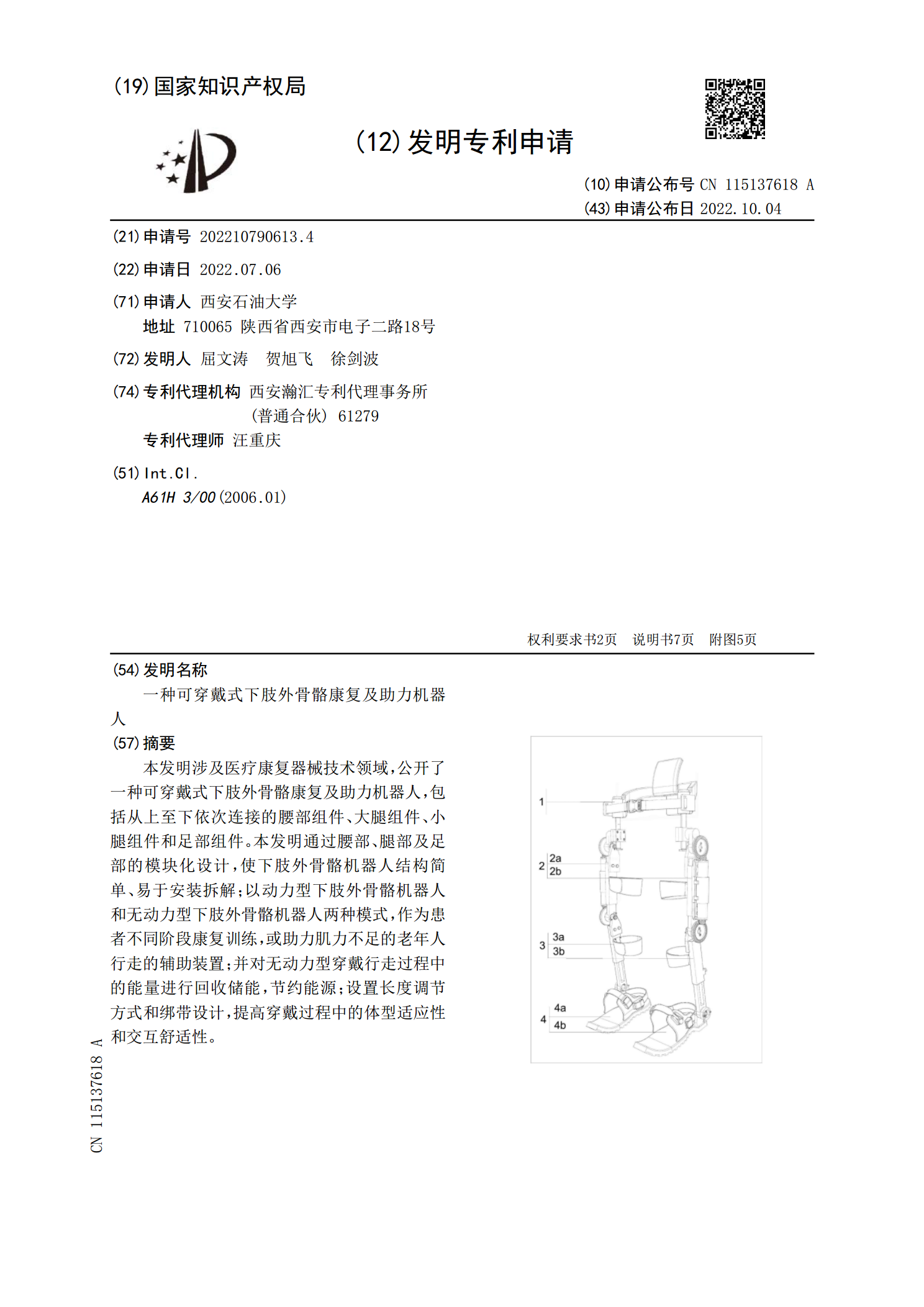
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。
一种柔性下肢外骨骼.pdf
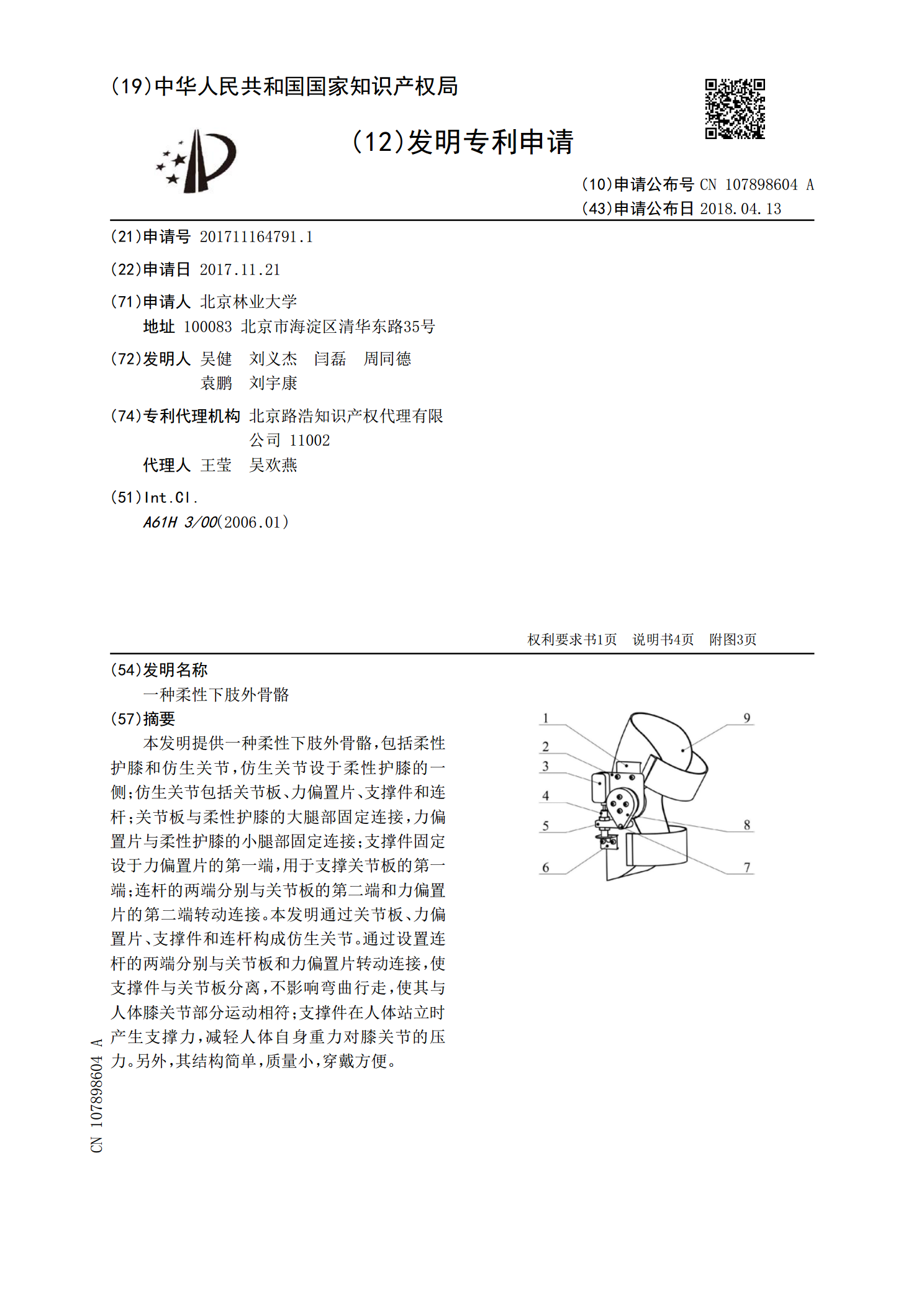
本发明提供一种柔性下肢外骨骼,包括柔性护膝和仿生关节,仿生关节设于柔性护膝的一侧;仿生关节包括关节板、力偏置片、支撑件和连杆;关节板与柔性护膝的大腿部固定连接,力偏置片与柔性护膝的小腿部固定连接;支撑件固定设于力偏置片的第一端,用于支撑关节板的第一端;连杆的两端分别与关节板的第二端和力偏置片的第二端转动连接。本发明通过关节板、力偏置片、支撑件和连杆构成仿生关节。通过设置连杆的两端分别与关节板和力偏置片转动连接,使支撑件与关节板分离,不影响弯曲行走,使其与人体膝关节部分运动相符;支撑件在人体站立时产生支撑力
一种软性下肢助力外骨骼.pdf
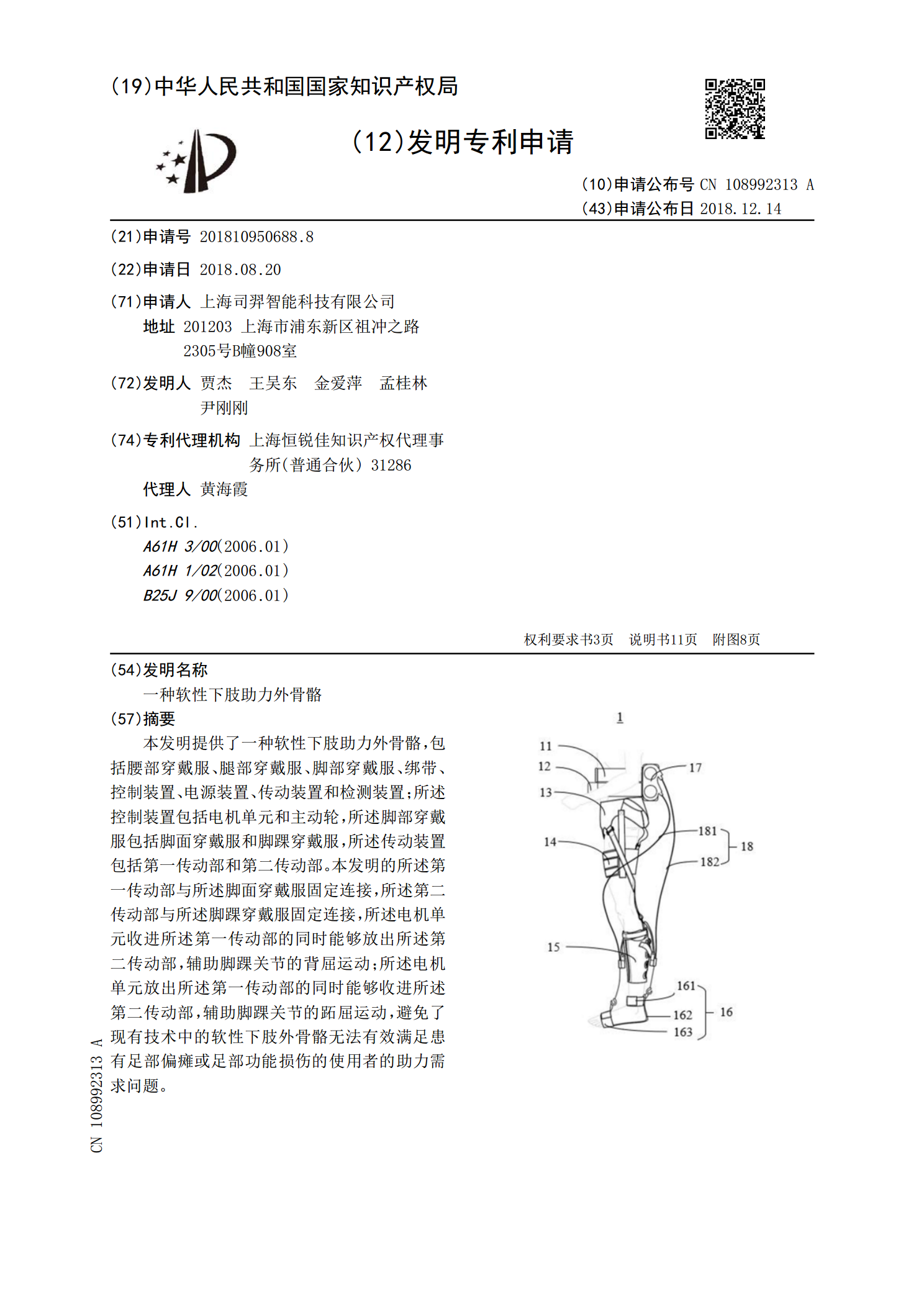
本发明提供了一种软性下肢助力外骨骼,包括腰部穿戴服、腿部穿戴服、脚部穿戴服、绑带、控制装置、电源装置、传动装置和检测装置;所述控制装置包括电机单元和主动轮,所述脚部穿戴服包括脚面穿戴服和脚踝穿戴服,所述传动装置包括第一传动部和第二传动部。本发明的所述第一传动部与所述脚面穿戴服固定连接,所述第二传动部与所述脚踝穿戴服固定连接,所述电机单元收进所述第一传动部的同时能够放出所述第二传动部,辅助脚踝关节的背屈运动;所述电机单元放出所述第一传动部的同时能够收进所述第二传动部,辅助脚踝关节的跖屈运动,避免了现有技术中