
一种夹持翻转机构、应用及其构建的垄作式草莓采摘机器.pdf

高格****gu


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种夹持翻转机构、应用及其构建的垄作式草莓采摘机器.pdf
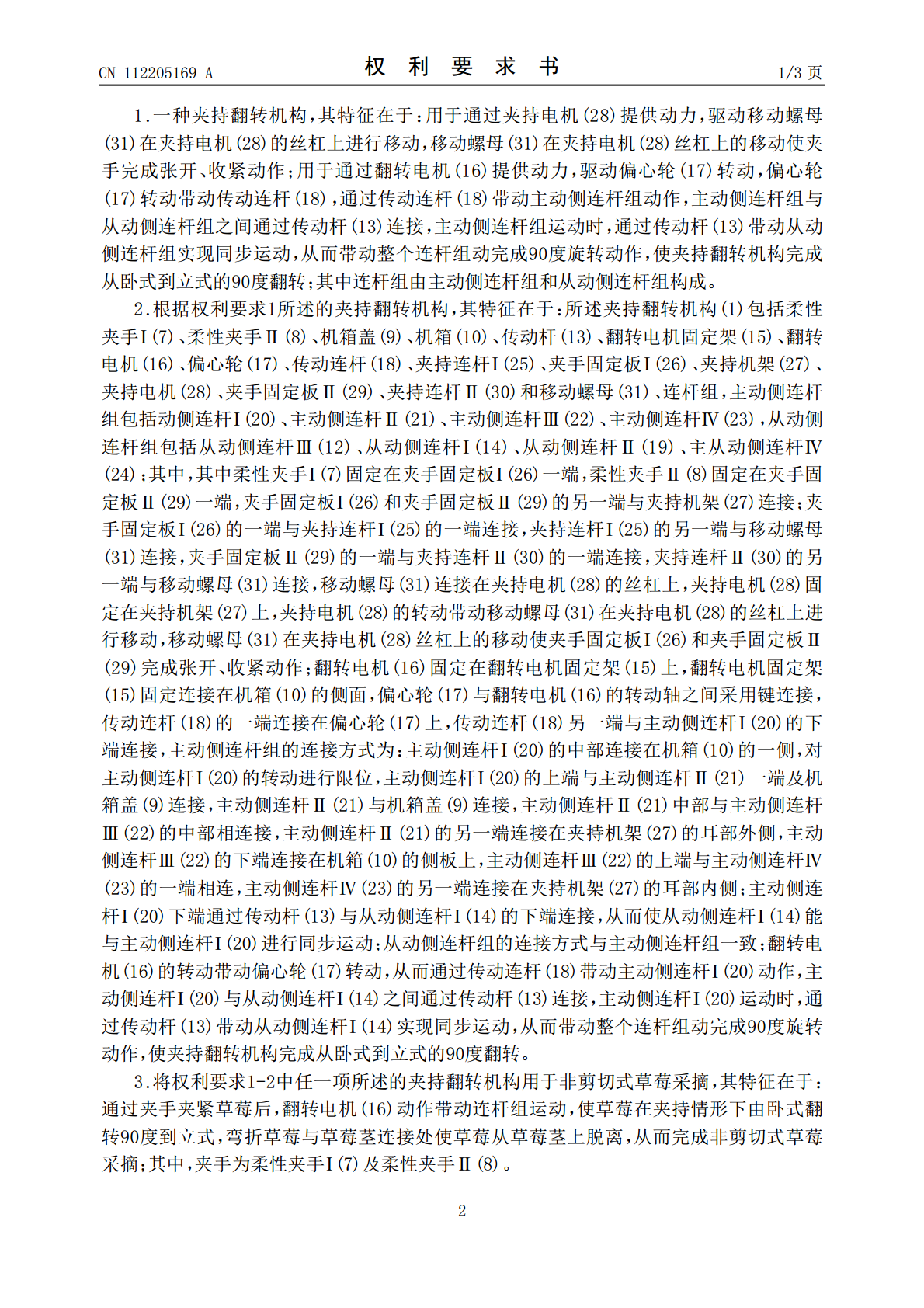
本发明公开了一种夹持翻转机构、应用及其构建的垄作式草莓采摘机器,属于机械设备领域。本发明采用夹持翻转机构,其通过一个电机配合移动螺母实现了夹持,而通过偏心轮及另一个电机的巧妙组合,实现了翻转;将该夹持翻转机构进行应用,可以有效地用于非剪切式草莓采摘;再进一步地,设计了一种垄作式草莓采摘机器,该机器通过机械臂、横向移动机构、纵向移动机构的巧妙结合,可以将夹持翻转机构夹持的物品进行准确放置,实现了草莓采摘的垄间作业。
一种垄作草莓采摘机器人.pdf
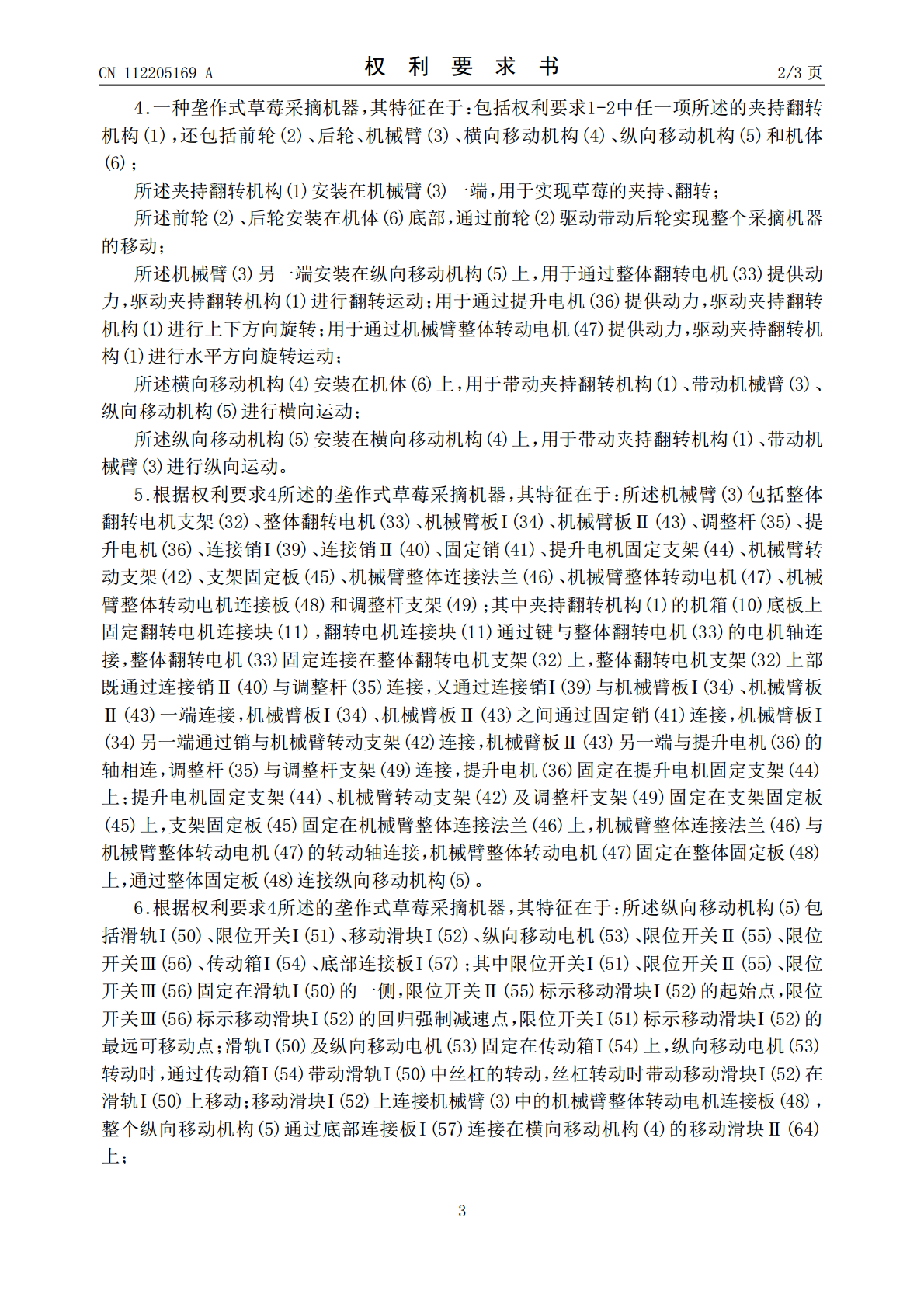
本发明提供了一种草莓采摘机器人,包括支撑装置及可在其上运动的移动装置、可在移动装置上滑动的采摘装置,支撑装置为移动装置跨垄运动搭建支撑平台,移动装置通过驱动车轮在支撑装置底板上跨垄前后运动,采摘装置可在支架上沿垄沟方向滑动。可替代人工采摘,省时省力,采摘装置不仅可以沿垄沟方向移动,同时能够跨垄移动,特别是在垄沟距离较长的采摘现场,可自动跨垄至下一垄沟进行采摘,以完成采摘装置横向和纵向的移动作业,从而实现垄作草莓的自动化连续采摘。
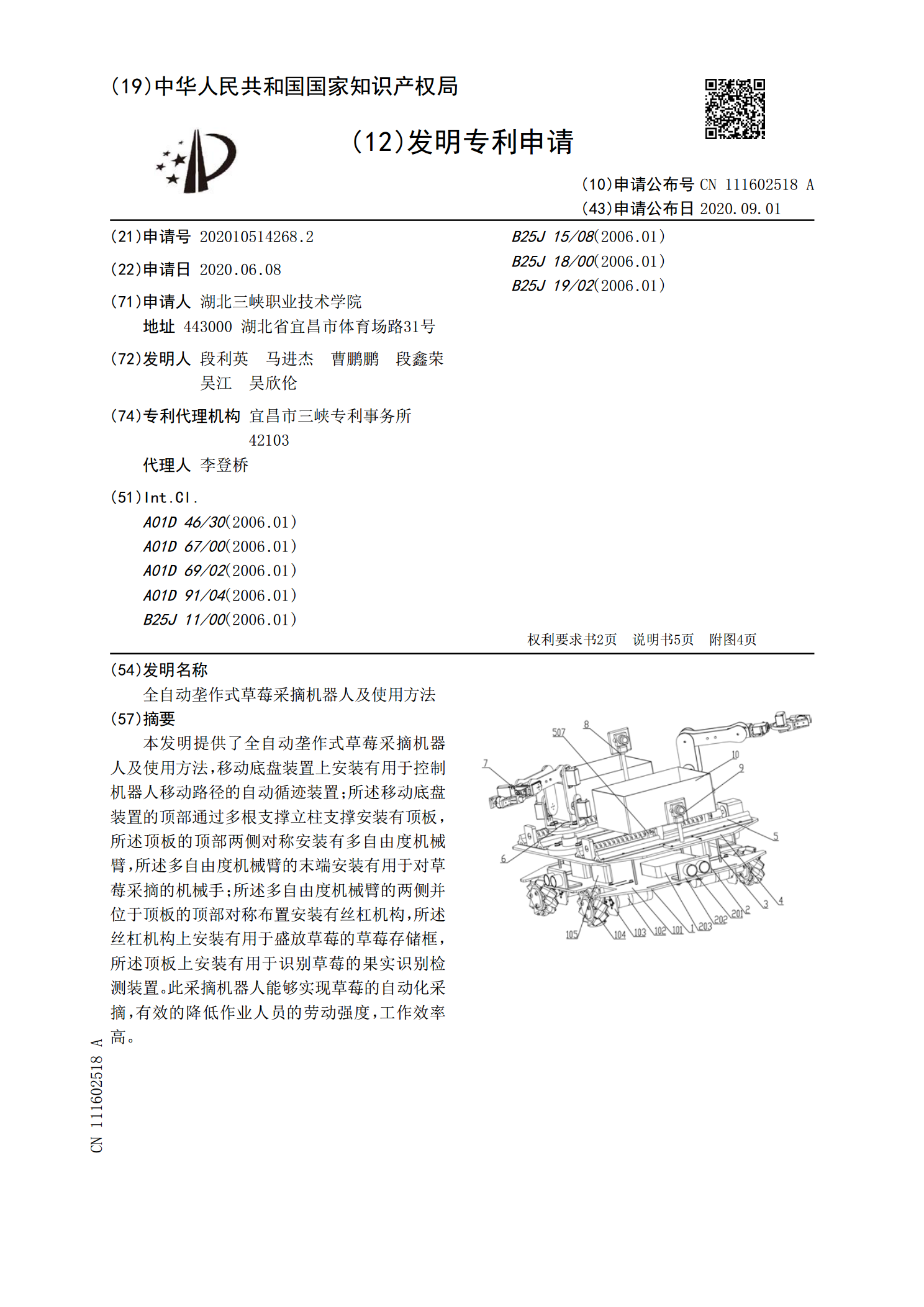
全自动垄作式草莓采摘机器人及使用方法.pdf
本发明提供了全自动垄作式草莓采摘机器人及使用方法,移动底盘装置上安装有用于控制机器人移动路径的自动循迹装置;所述移动底盘装置的顶部通过多根支撑立柱支撑安装有顶板,所述顶板的顶部两侧对称安装有多自由度机械臂,所述多自由度机械臂的末端安装有用于对草莓采摘的机械手;所述多自由度机械臂的两侧并位于顶板的顶部对称布置安装有丝杠机构,所述丝杠机构上安装有用于盛放草莓的草莓存储框,所述顶板上安装有用于识别草莓的果实识别检测装置。此采摘机器人能够实现草莓的自动化采摘,有效的降低作业人员的劳动强度,工作效率高。
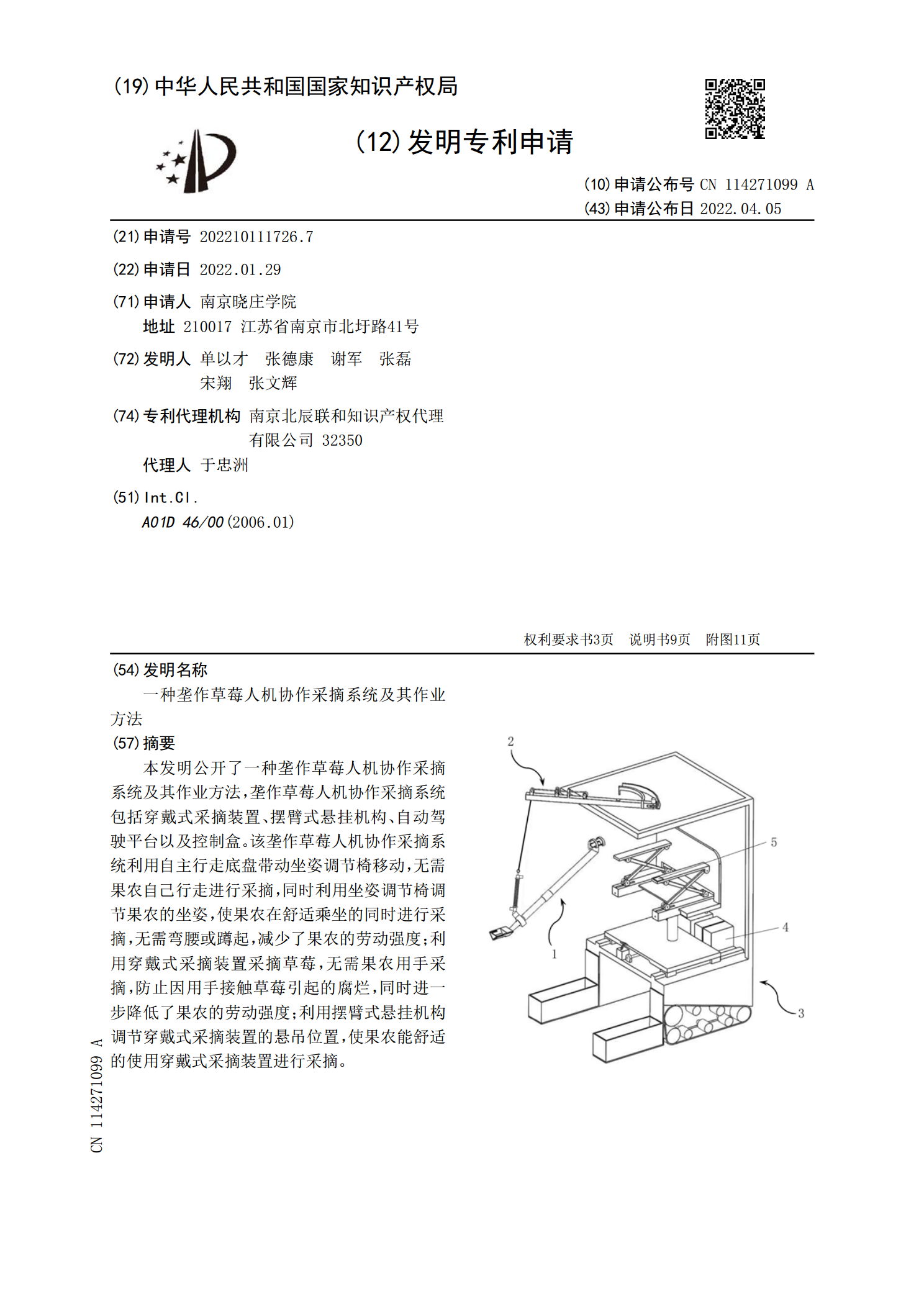
一种垄作草莓人机协作采摘系统及其作业方法.pdf
本发明公开了一种垄作草莓人机协作采摘系统及其作业方法,垄作草莓人机协作采摘系统包括穿戴式采摘装置、摆臂式悬挂机构、自动驾驶平台以及控制盒。该垄作草莓人机协作采摘系统利用自主行走底盘带动坐姿调节椅移动,无需果农自己行走进行采摘,同时利用坐姿调节椅调节果农的坐姿,使果农在舒适乘坐的同时进行采摘,无需弯腰或蹲起,减少了果农的劳动强度;利用穿戴式采摘装置采摘草莓,无需果农用手采摘,防止因用手接触草莓引起的腐烂,同时进一步降低了果农的劳动强度;利用摆臂式悬挂机构调节穿戴式采摘装置的悬吊位置,使果农能舒适的使用穿戴式
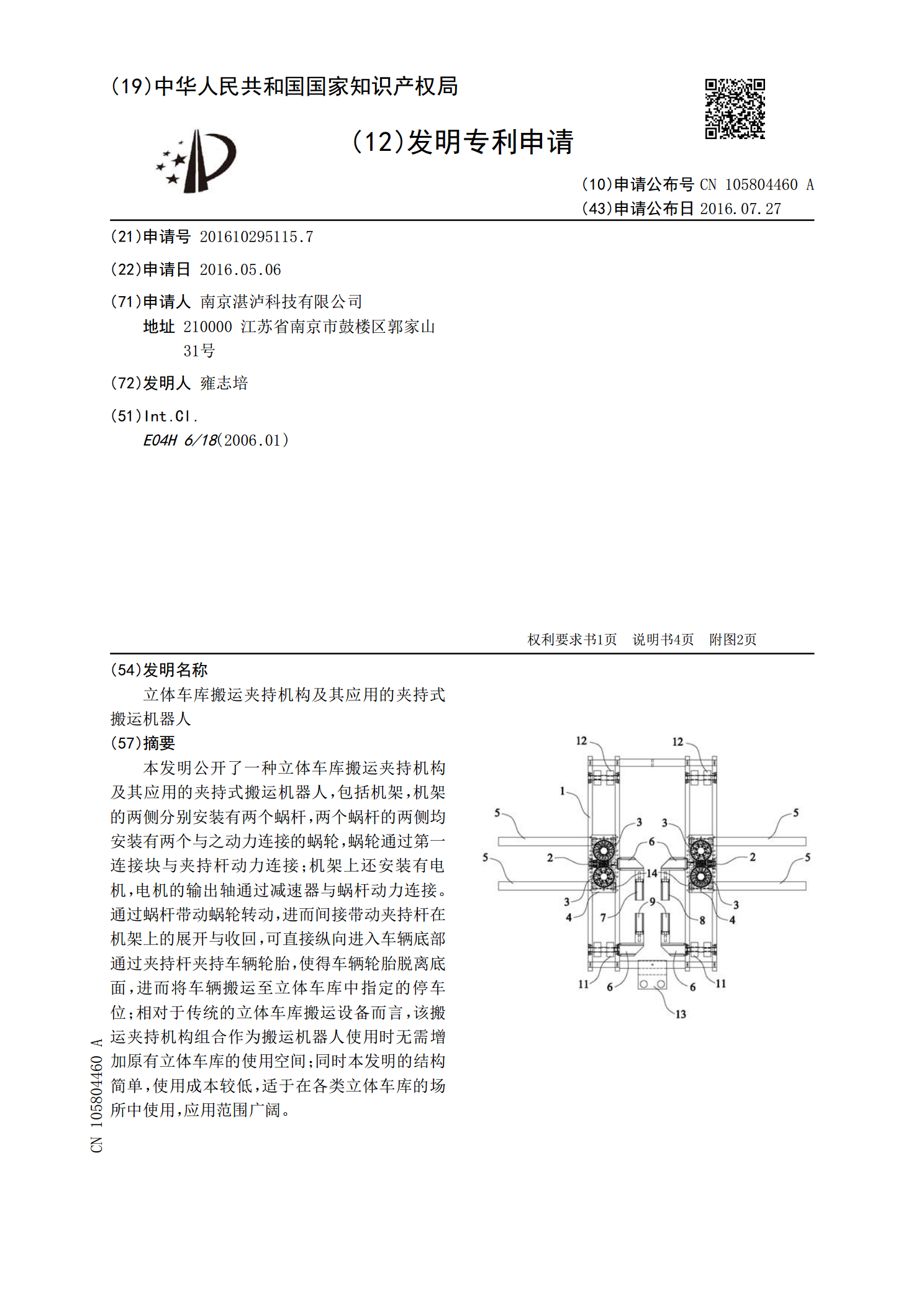
立体车库搬运夹持机构及其应用的夹持式搬运机器人.pdf
本发明公开了一种立体车库搬运夹持机构及其应用的夹持式搬运机器人,包括机架,机架的两侧分别安装有两个蜗杆,两个蜗杆的两侧均安装有两个与之动力连接的蜗轮,蜗轮通过第一连接块与夹持杆动力连接;机架上还安装有电机,电机的输出轴通过减速器与蜗杆动力连接。通过蜗杆带动蜗轮转动,进而间接带动夹持杆在机架上的展开与收回,可直接纵向进入车辆底部通过夹持杆夹持车辆轮胎,使得车辆轮胎脱离底面,进而将车辆搬运至立体车库中指定的停车位;相对于传统的立体车库搬运设备而言,该搬运夹持机构组合作为搬运机器人使用时无需增加原有立体车库的使