
线驱动多关节水下矢量推进装置及其仿生机构.pdf

一吃****春晓

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

线驱动多关节水下矢量推进装置及其仿生机构.pdf
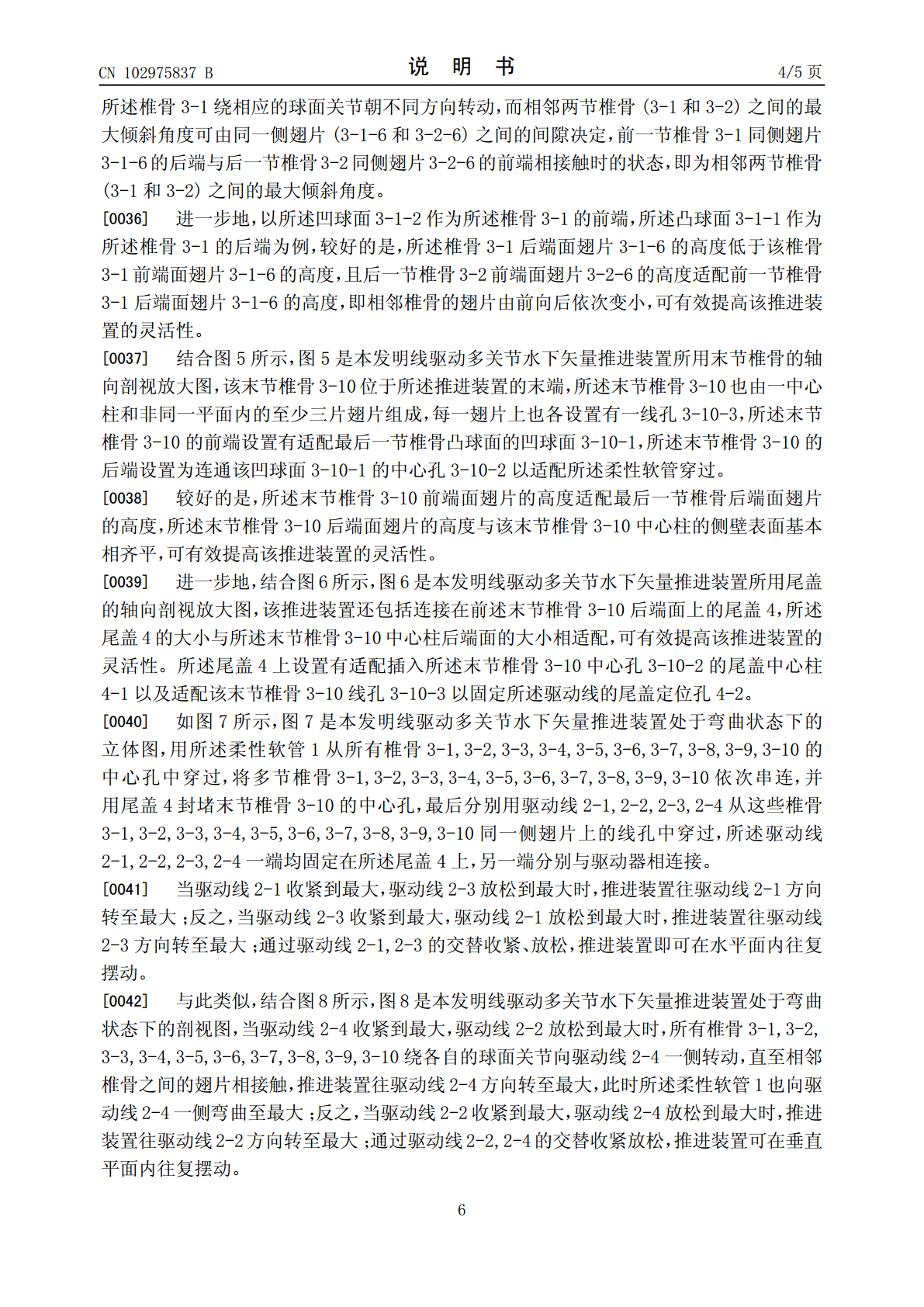
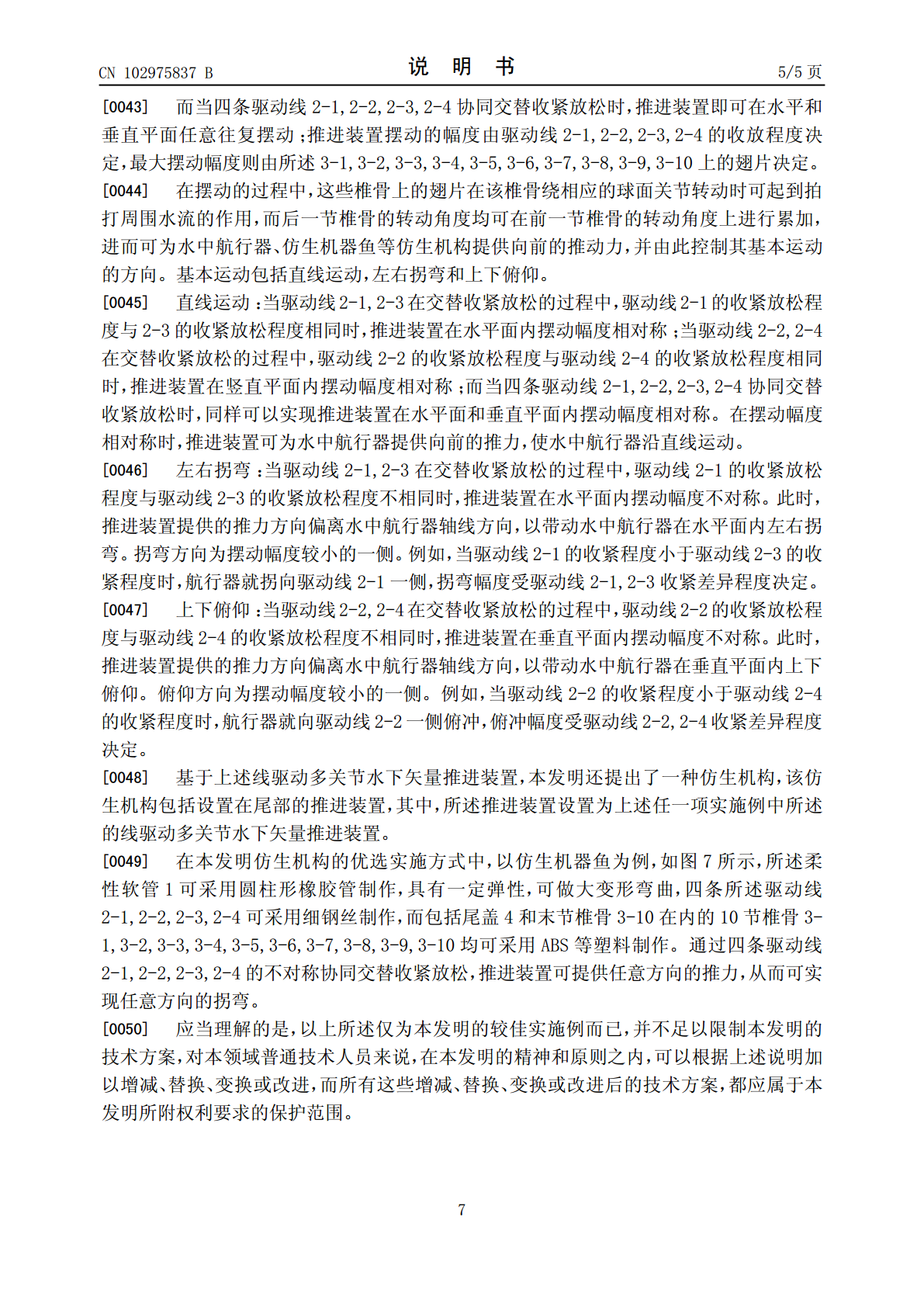
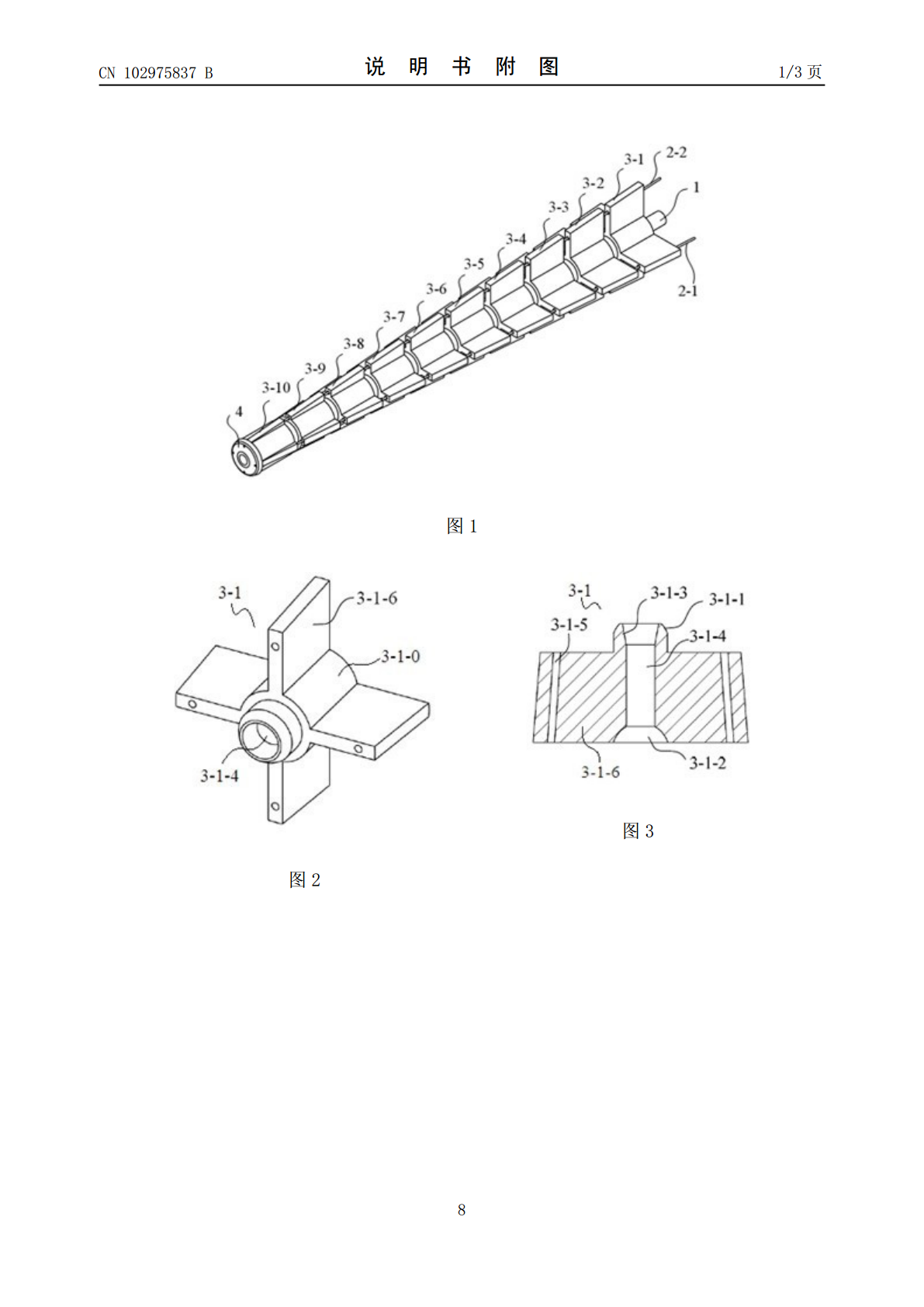
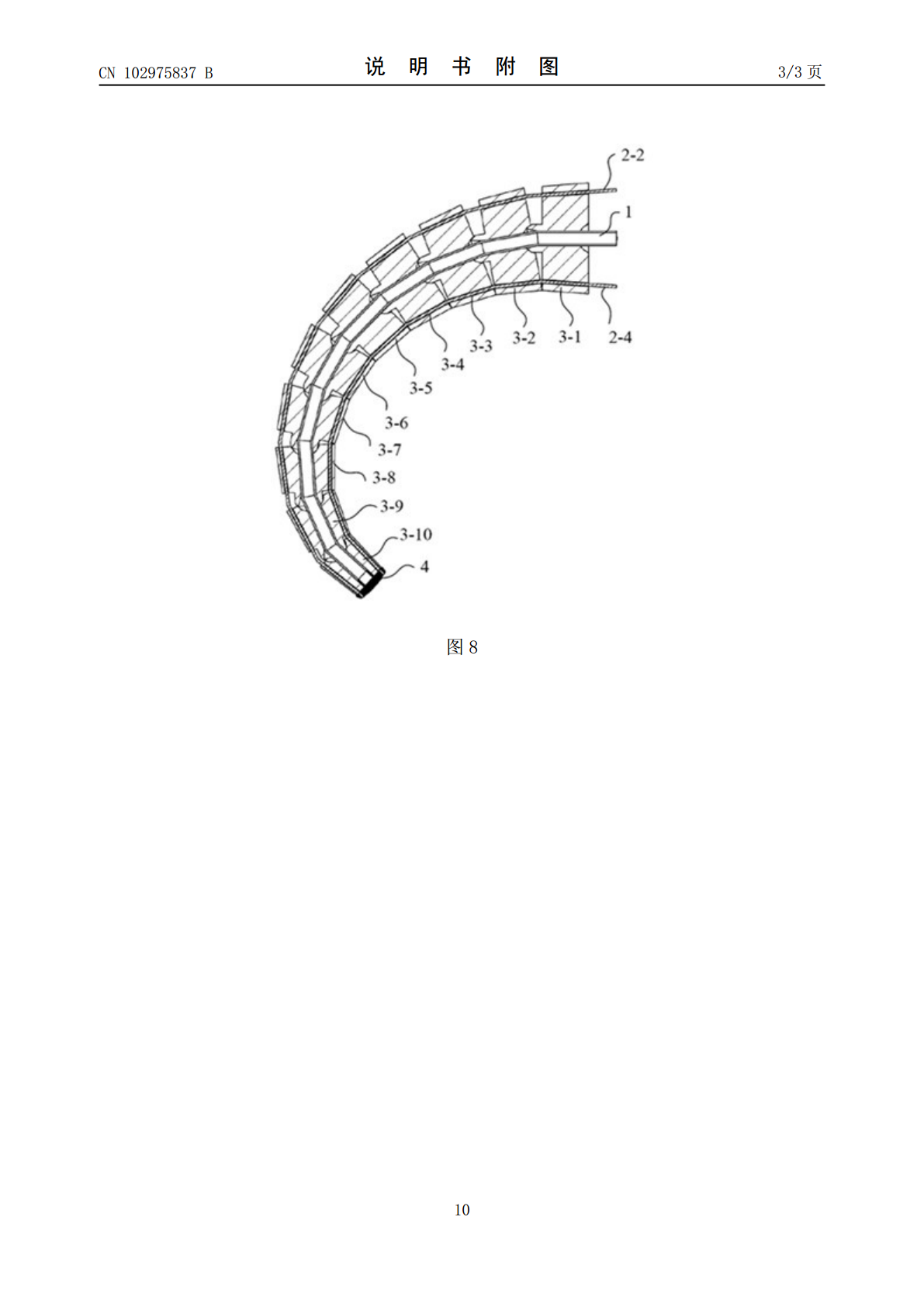
本发明公开了线驱动多关节水下矢量推进装置及其仿生机构,该推进装置包括柔性软管、椎骨和驱动线,椎骨由中心柱和非同一平面内的至少三片翅片组成,柔性软管从中心柱上的中心孔中穿过以串连多节椎骨,椎骨的一端设有凹球面,另一端设有凸球面,前一节椎骨的凸球面适配在后一节椎骨的凹球面中形成球面关节,每一翅片上各设有一线孔,同一侧翅片上的线孔中由一根驱动线穿过。由于采用了柔性软管串连具有球面关节要素的椎骨,并通过交替收紧放松椎骨不同翅片上的驱动线,带动椎骨绕相应的球面关节产生转动,可形成任意方向的推力和拐弯,进而实现了在推
线驱动柔性仿鱼尾水下推进装置及其仿生机构.pdf
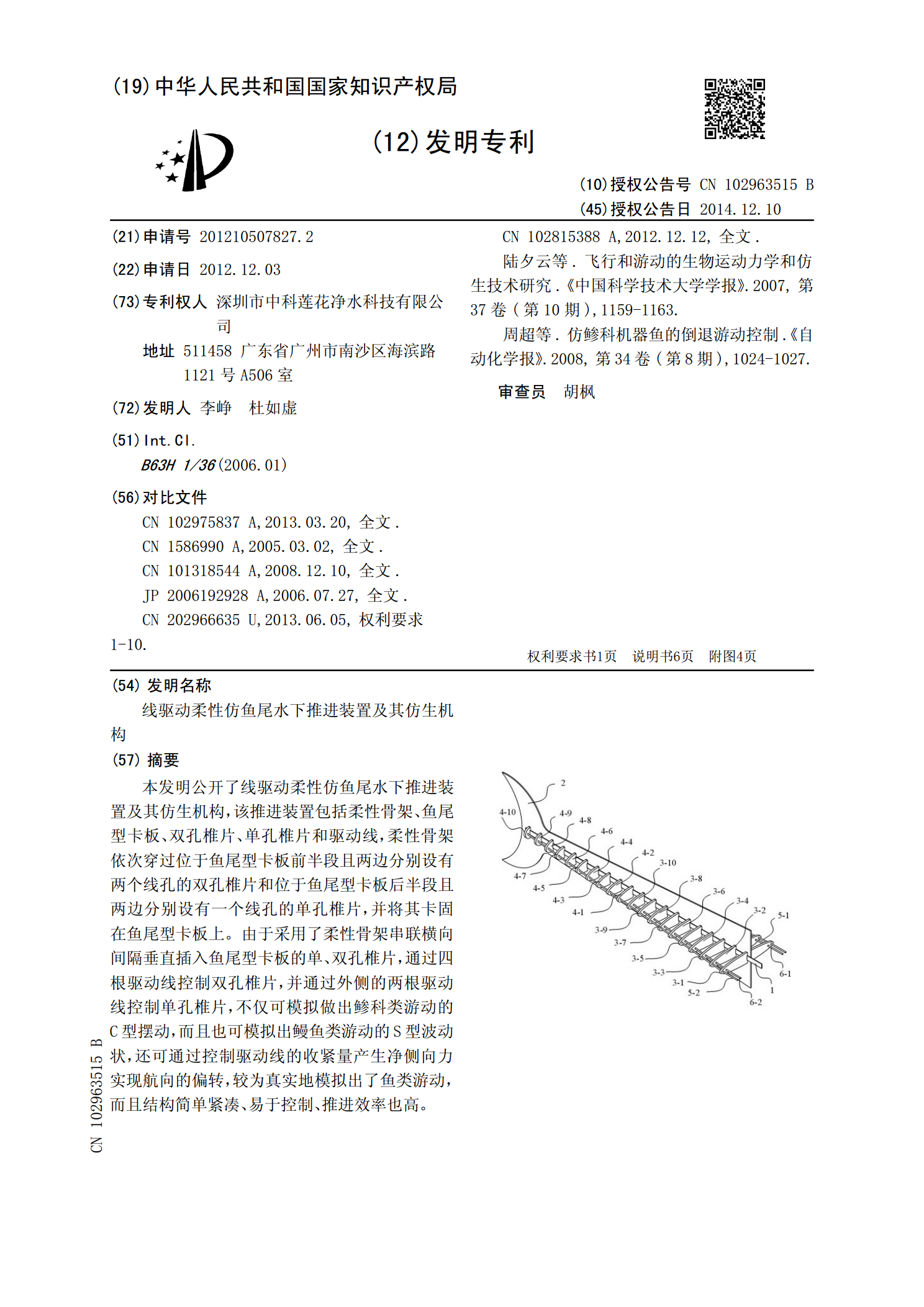
本发明公开了线驱动柔性仿鱼尾水下推进装置及其仿生机构,该推进装置包括柔性骨架、鱼尾型卡板、双孔椎片、单孔椎片和驱动线,柔性骨架依次穿过位于鱼尾型卡板前半段且两边分别设有两个线孔的双孔椎片和位于鱼尾型卡板后半段且两边分别设有一个线孔的单孔椎片,并将其卡固在鱼尾型卡板上。由于采用了柔性骨架串联横向间隔垂直插入鱼尾型卡板的单、双孔椎片,通过四根驱动线控制双孔椎片,并通过外侧的两根驱动线控制单孔椎片,不仅可模拟做出鲹科类游动的C型摆动,而且也可模拟出鳗鱼类游动的S型波动状,还可通过控制驱动线的收紧量产生净侧向力实

伺服驱动多关节仿生手.pdf
本发明解决的技术问题是提供了一种伺服驱动多关节仿生手。首先将仿生手各部分用弹性硅胶带粘接固定,每组运动关节用一根尼龙线带动,各尼龙线一端缠绕在各个绕线轮上,另一端穿过仿生手各部分的通孔,分别固定在各关节运动部分的末端。当伺服电动机驱动绕线轮旋转,把尼龙绳收拢,带动连接各关节的弹性硅胶带弯曲,相应的仿生手各关节产生弯曲动作,通过伺服电动机的精确控制,可以使各关节运动到指定的位置;当伺服电动机驱动绕线轮反向旋转,把尼龙绳放松,弹性硅胶带复位,带动仿生手各关节恢复到平直的状态。本伺服驱动多关节仿生手可代替人手完
一种摆动装置、水下仿生推进器及其应用.pdf
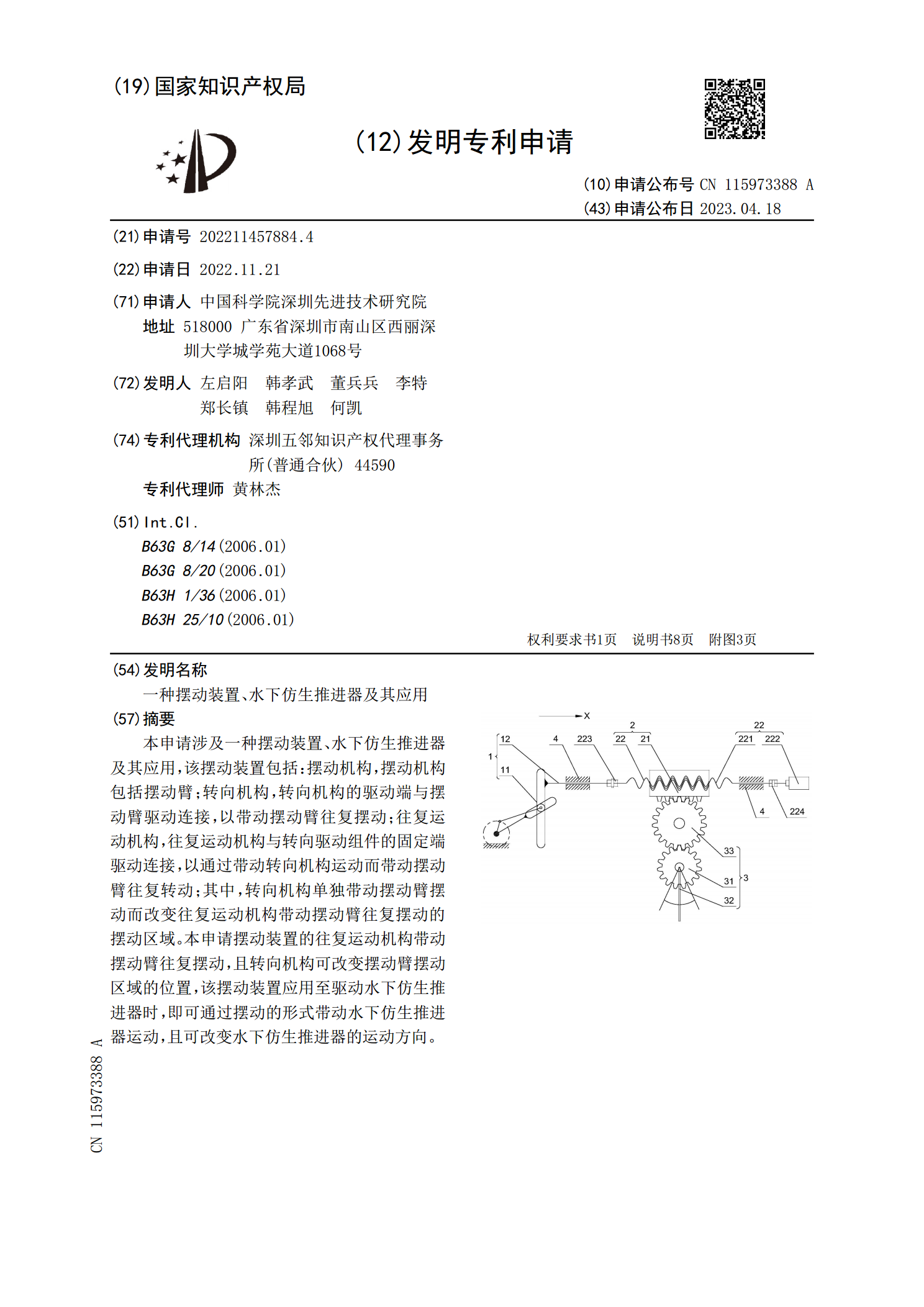
本申请涉及一种摆动装置、水下仿生推进器及其应用,该摆动装置包括:摆动机构,摆动机构包括摆动臂;转向机构,转向机构的驱动端与摆动臂驱动连接,以带动摆动臂往复摆动;往复运动机构,往复运动机构与转向驱动组件的固定端驱动连接,以通过带动转向机构运动而带动摆动臂往复转动;其中,转向机构单独带动摆动臂摆动而改变往复运动机构带动摆动臂往复摆动的摆动区域。本申请摆动装置的往复运动机构带动摆动臂往复摆动,且转向机构可改变摆动臂摆动区域的位置,该摆动装置应用至驱动水下仿生推进器时,即可通过摆动的形式带动水下仿生推进器运动,且

基于球齿轮机构的全方位主动矢量推进水下螺旋桨装置.pdf
一种基于球齿轮机构的全方位主动矢量推进水下螺旋桨装置,它包括螺旋桨、柔性轴及驱动机构,柔性轴包括两对以上依次串联的球齿轮,每对球齿轮中的阳极球齿轮通过圆柱面配合连接于一级万向节上,相邻两对球齿轮中的阴极球齿轮一同通过圆柱面配合连接于二级万向节上,位于柔性轴最前端的阳极球齿轮与螺旋桨相连,位于柔性轴最末端的阳极球齿轮与驱动机构相连,每对球齿轮中的阳极球齿轮和阴极球齿轮相互啮合形成行星齿轮机构;与位于柔性轴最末端阳极球齿轮连接的一级万向节与十字推力环相连,十字推力环与驱动机构相连,驱动机构包括两个双