
主动加从动混合驱动仿鱼尾水下推进装置.pdf

志玉****爱啊

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
主动加从动混合驱动仿鱼尾水下推进装置.pdf
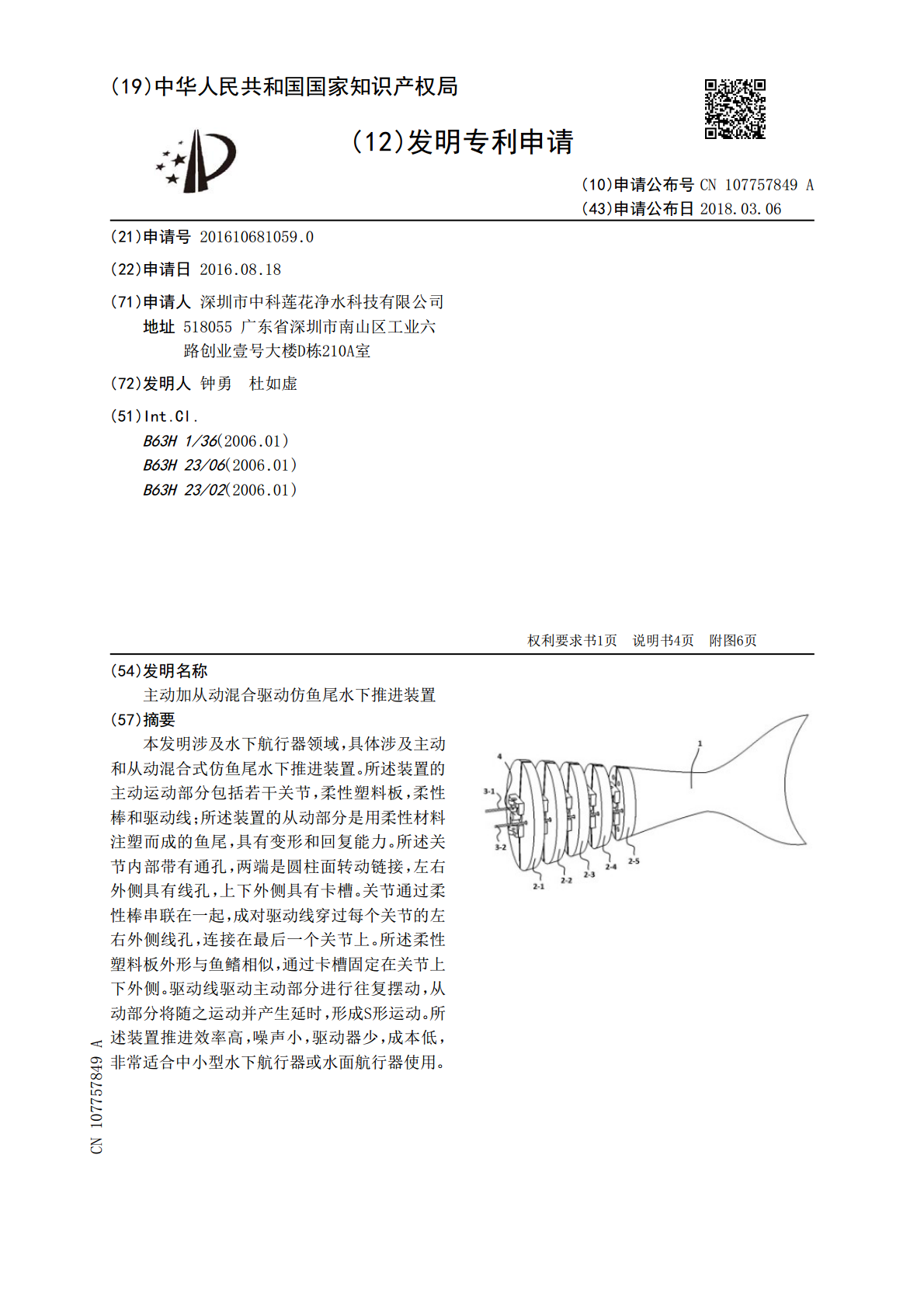
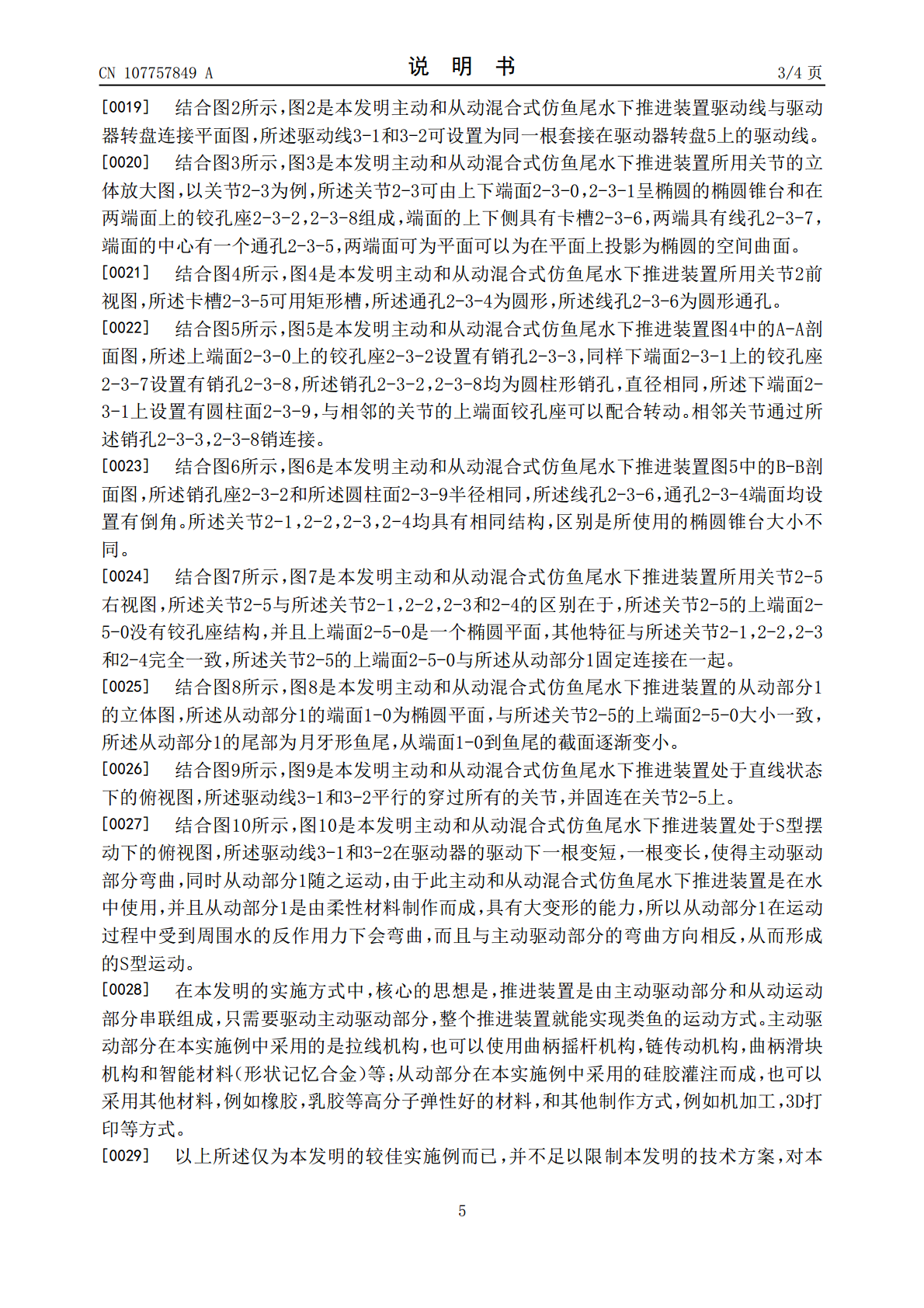
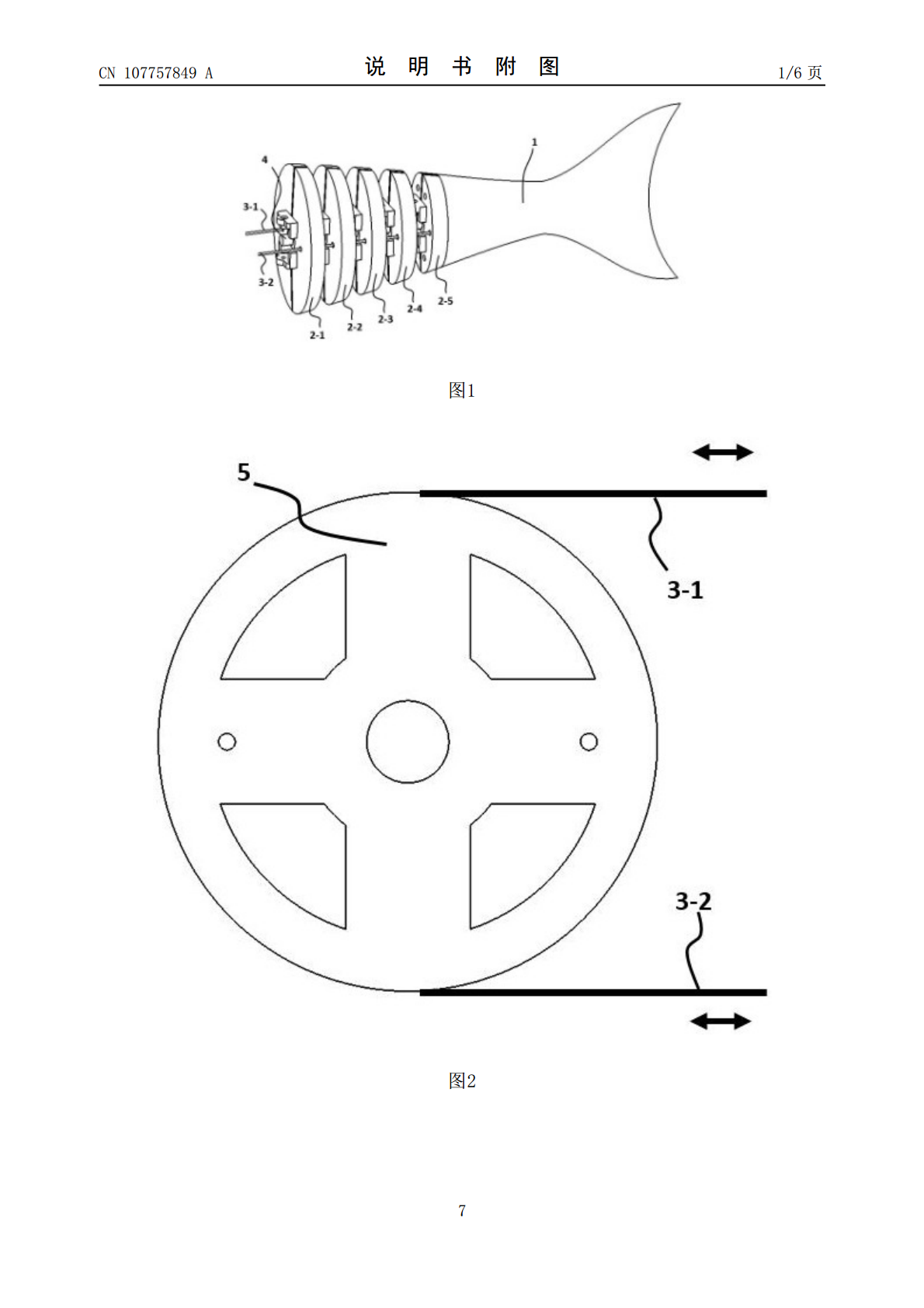
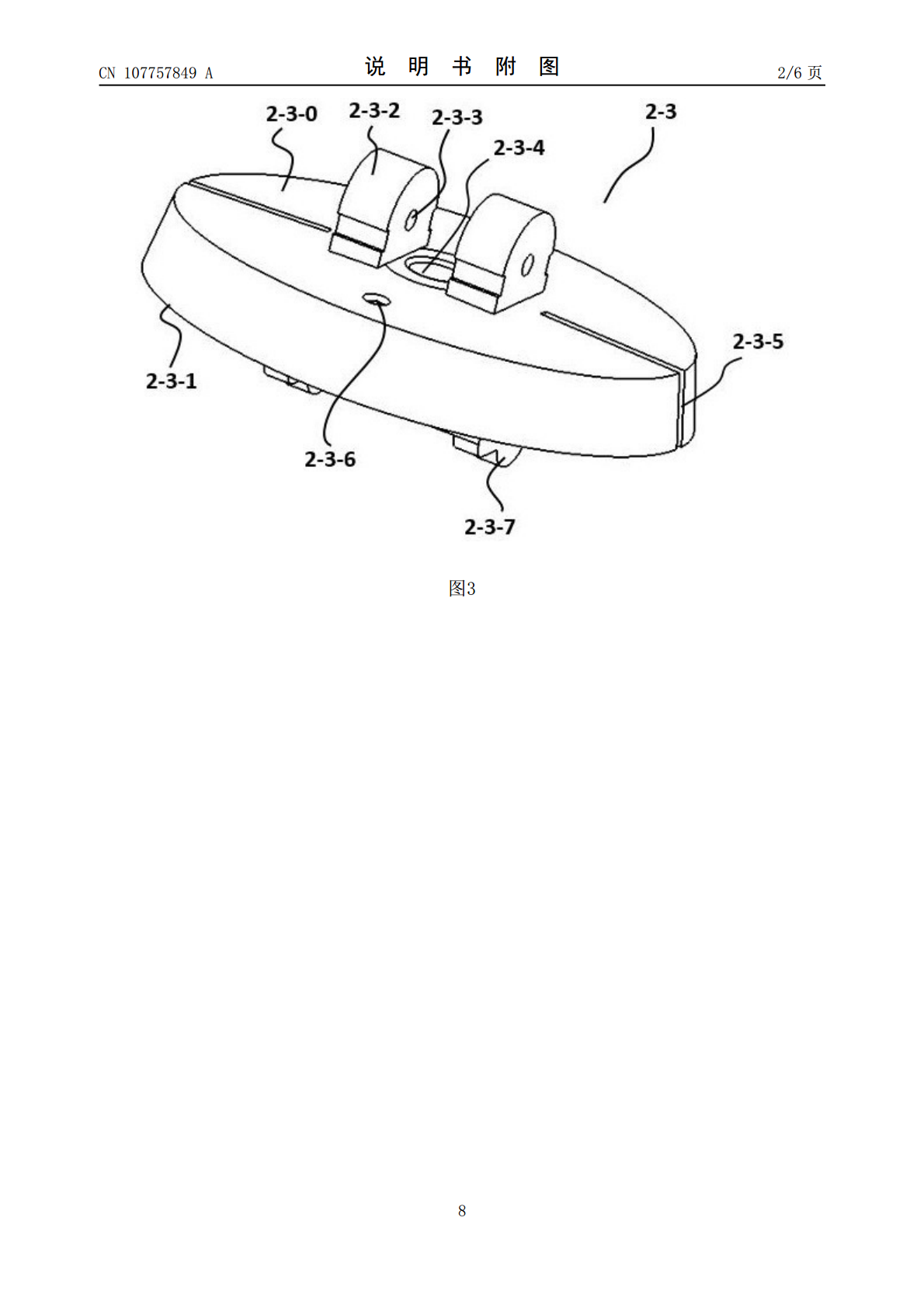
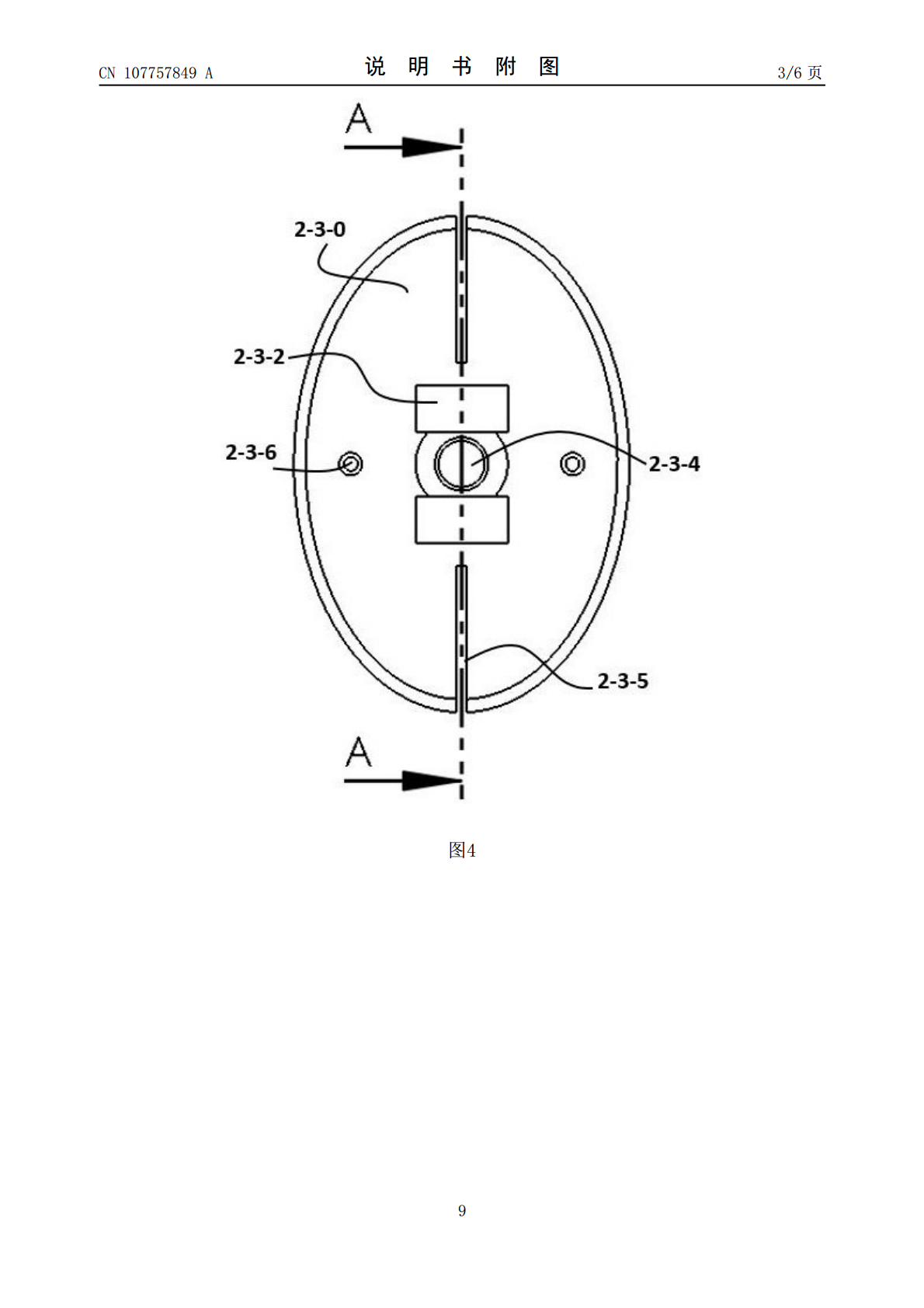
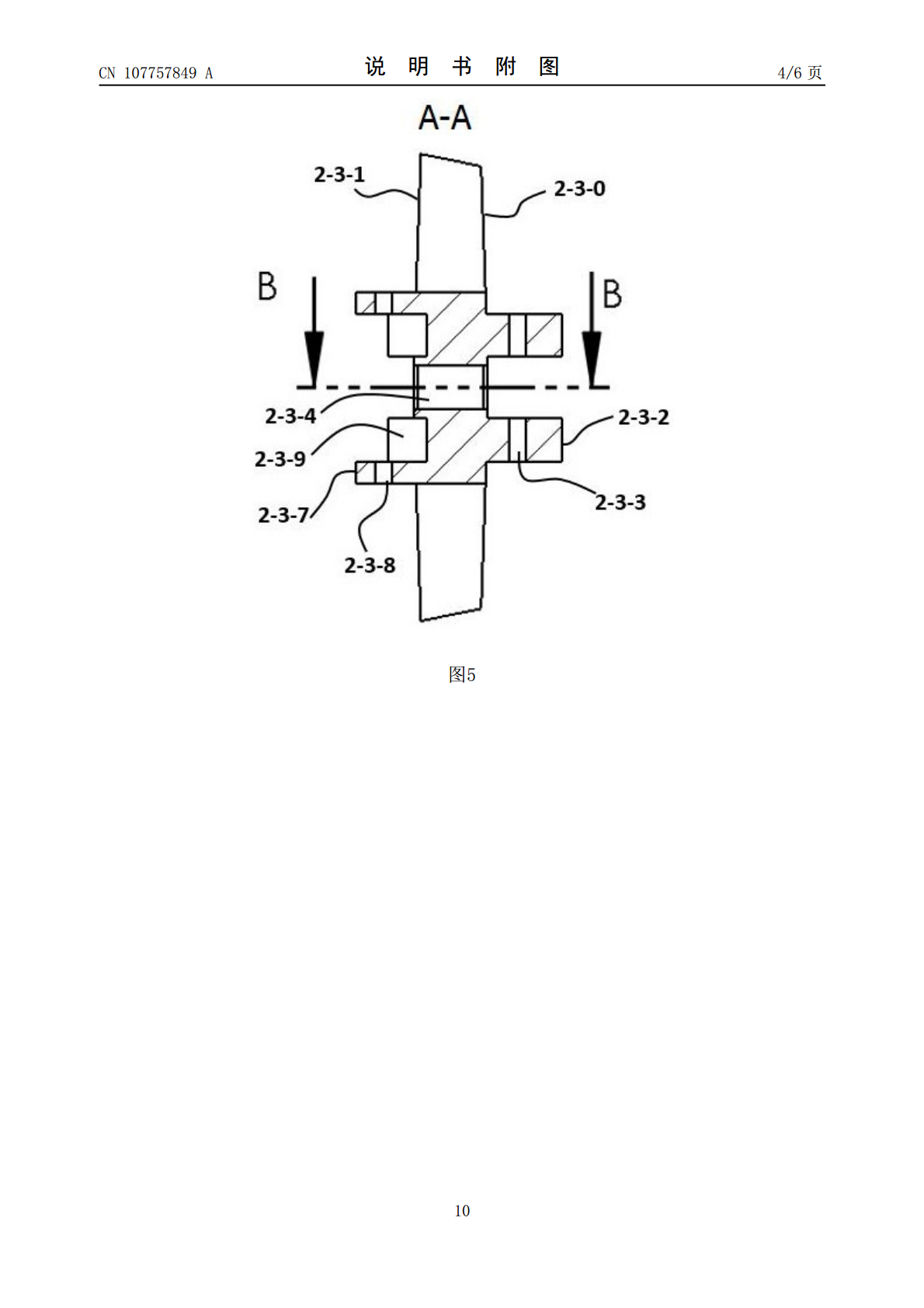
本发明涉及水下航行器领域,具体涉及主动和从动混合式仿鱼尾水下推进装置。所述装置的主动运动部分包括若干关节,柔性塑料板,柔性棒和驱动线;所述装置的从动部分是用柔性材料注塑而成的鱼尾,具有变形和回复能力。所述关节内部带有通孔,两端是圆柱面转动链接,左右外侧具有线孔,上下外侧具有卡槽。关节通过柔性棒串联在一起,成对驱动线穿过每个关节的左右外侧线孔,连接在最后一个关节上。所述柔性塑料板外形与鱼鳍相似,通过卡槽固定在关节上下外侧。驱动线驱动主动部分进行往复摆动,从动部分将随之运动并产生延时,形成S形运动。所述装置推
线驱动柔性仿鱼尾水下推进装置及其仿生机构.pdf
本发明公开了线驱动柔性仿鱼尾水下推进装置及其仿生机构,该推进装置包括柔性骨架、鱼尾型卡板、双孔椎片、单孔椎片和驱动线,柔性骨架依次穿过位于鱼尾型卡板前半段且两边分别设有两个线孔的双孔椎片和位于鱼尾型卡板后半段且两边分别设有一个线孔的单孔椎片,并将其卡固在鱼尾型卡板上。由于采用了柔性骨架串联横向间隔垂直插入鱼尾型卡板的单、双孔椎片,通过四根驱动线控制双孔椎片,并通过外侧的两根驱动线控制单孔椎片,不仅可模拟做出鲹科类游动的C型摆动,而且也可模拟出鳗鱼类游动的S型波动状,还可通过控制驱动线的收紧量产生净侧向力实
一种绳驱动仿鱼尾推进船.pdf
本发明涉及船舶领域,具体涉及一种绳驱动仿鱼尾推进船,包括若干绳驱动仿鱼尾推进单体船,单体船连接装置以及控制中心。所述绳驱动仿鱼尾推进单体船,包括舱体,舱盖以及绳驱动仿鱼尾推进装置。所述绳驱动仿鱼尾推进装置包括鱼尾结构,若干滑轮,若干滑轮支架,若干驱动绳,以及驱动轮。若干所述绳驱动仿鱼尾推进单体船通过所述单体船连接装置相连,可组成多体船。所述多体船通过所述控制中心实现航行控制。本发明采用仿鱼尾推进装置模拟鱼类游动,为船提供动力,具有推进效率高,噪音小,转弯半径小的特点;通过单体船组成多体船,增大船舱体积,并
一种新型仿鱼尾的船用推进装置.pdf
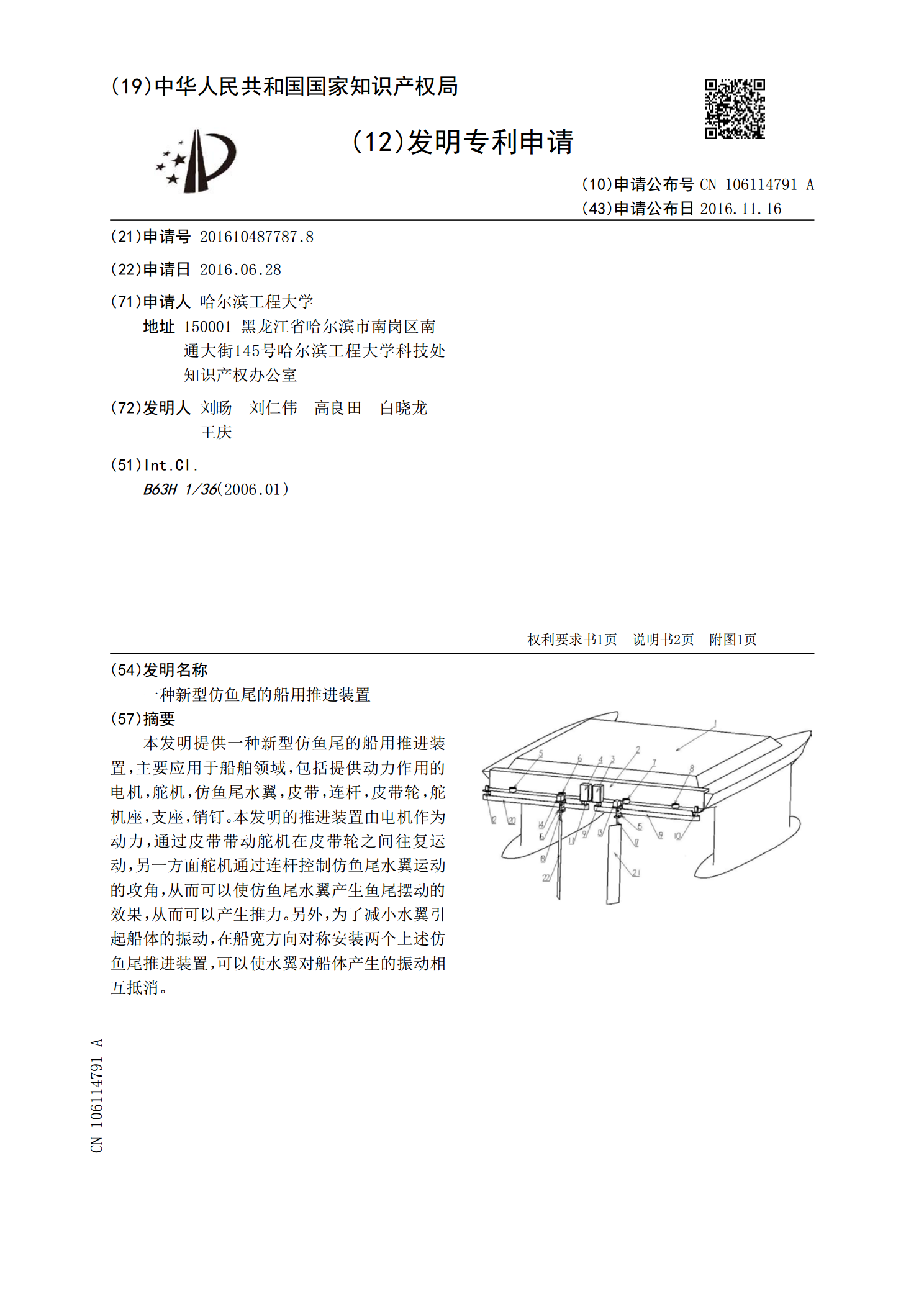
本发明提供一种新型仿鱼尾的船用推进装置,主要应用于船舶领域,包括提供动力作用的电机,舵机,仿鱼尾水翼,皮带,连杆,皮带轮,舵机座,支座,销钉。本发明的推进装置由电机作为动力,通过皮带带动舵机在皮带轮之间往复运动,另一方面舵机通过连杆控制仿鱼尾水翼运动的攻角,从而可以使仿鱼尾水翼产生鱼尾摆动的效果,从而可以产生推力。另外,为了减小水翼引起船体的振动,在船宽方向对称安装两个上述仿鱼尾推进装置,可以使水翼对船体产生的振动相互抵消。

仿生鱼尾推进装置.pdf
本发明涉及一种仿生鱼尾推进装置,包括壳体、侧臂、齿条组件、不完全齿轮、活塞滑块、缸体、仿生鱼尾,其技术要点是:所述齿条组件可滑动的限位在壳体内,齿条组件包括腰圆环形结构,该环形结构长边的内壁上各设有一齿条,环形结构两端设有条形的耳部结构,不完全齿轮限位在壳体上,并与齿条组件的其中一个齿条相啮合,耳部结构上固定有活塞滑块,活塞滑块可滑动的限位在固定于壳体端部缸体内,活塞滑块另一端固定侧臂固定,左右两侧臂之间固定有仿生鱼尾。通过不完全齿轮与齿条组件啮合传动,带动齿条组件、左右侧臂以及鱼尾实现往复摆动,仿生鱼尾