
汽车运行警示方法.pdf

雨巷****莺莺

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
汽车运行警示方法.pdf
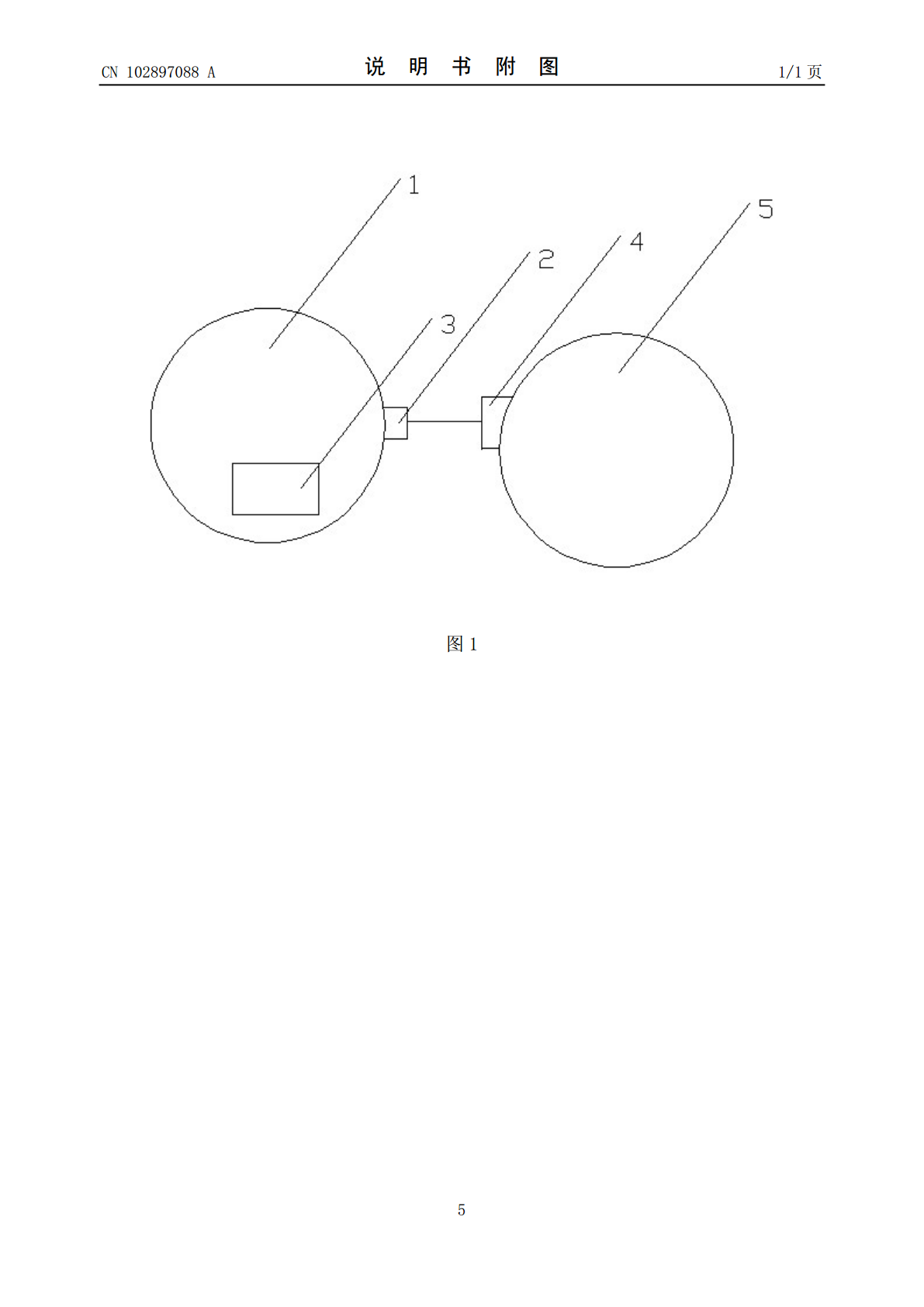
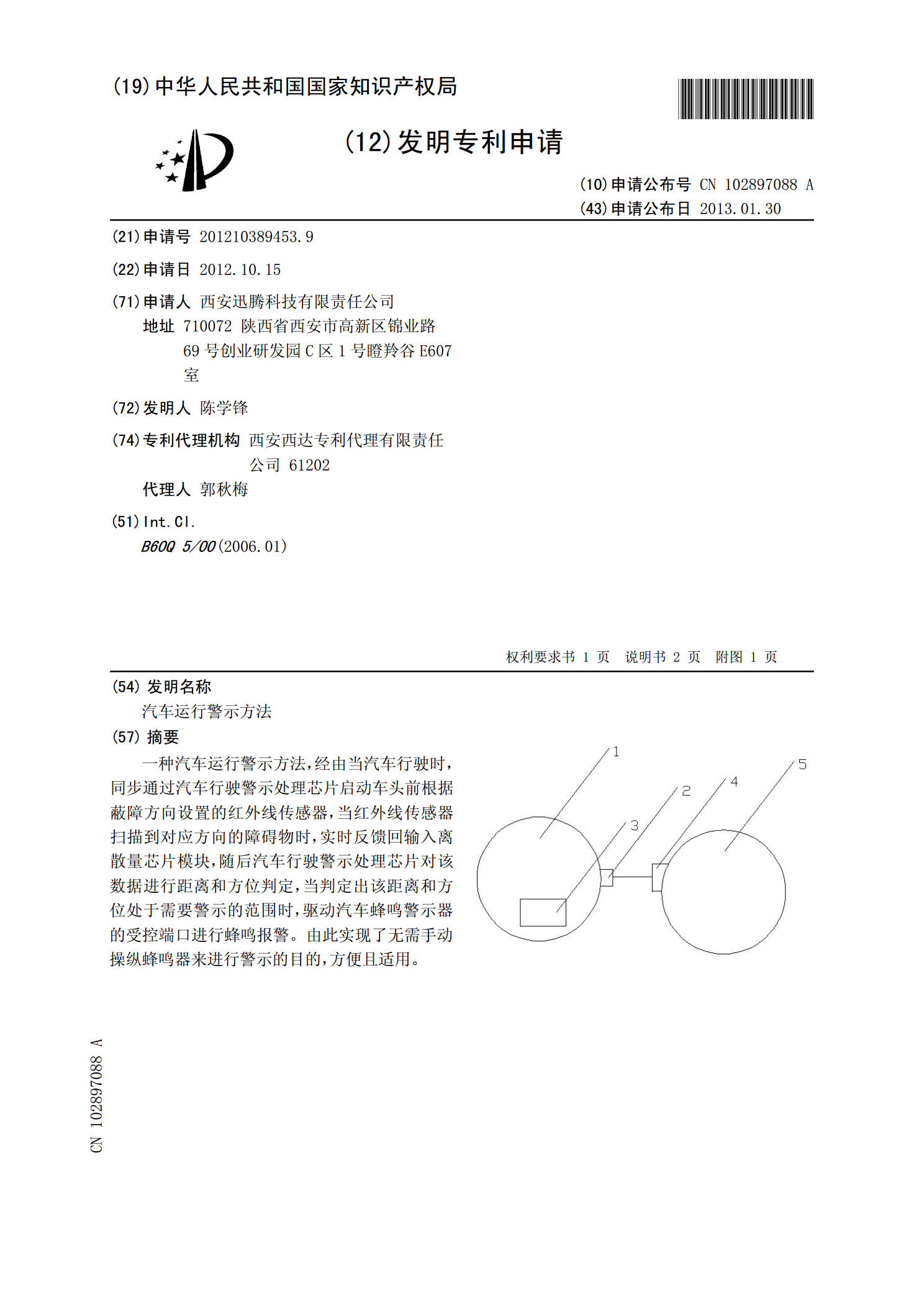
一种汽车运行警示方法,经由当汽车行驶时,同步通过汽车行驶警示处理芯片启动车头前根据蔽障方向设置的红外线传感器,当红外线传感器扫描到对应方向的障碍物时,实时反馈回输入离散量芯片模块,随后汽车行驶警示处理芯片对该数据进行距离和方位判定,当判定出该距离和方位处于需要警示的范围时,驱动汽车蜂鸣警示器的受控端口进行蜂鸣报警。由此实现了无需手动操纵蜂鸣器来进行警示的目的,方便且适用。
汽车警示装置及汽车.pdf
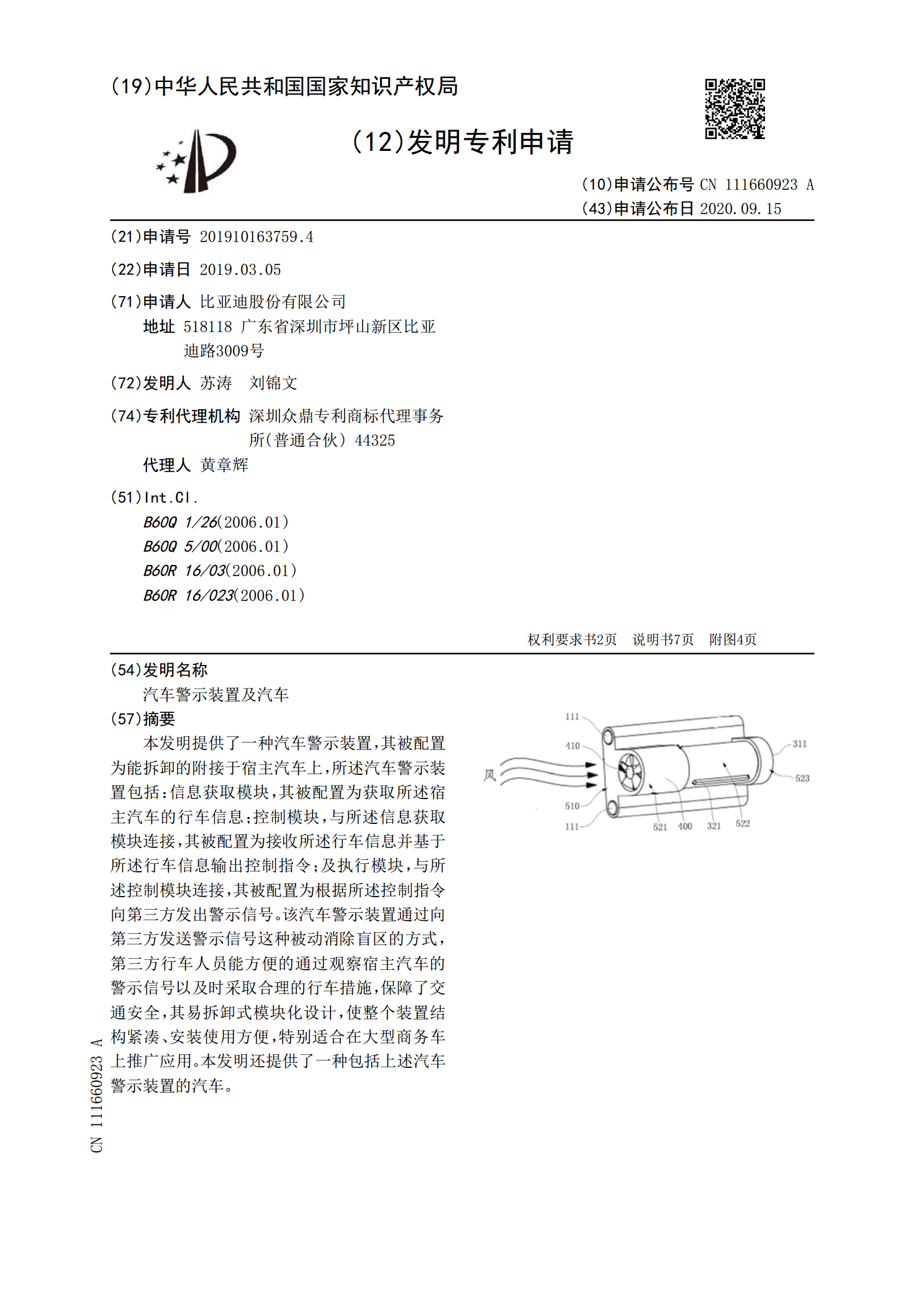
本发明提供了一种汽车警示装置,其被配置为能拆卸的附接于宿主汽车上,所述汽车警示装置包括:信息获取模块,其被配置为获取所述宿主汽车的行车信息;控制模块,与所述信息获取模块连接,其被配置为接收所述行车信息并基于所述行车信息输出控制指令;及执行模块,与所述控制模块连接,其被配置为根据所述控制指令向第三方发出警示信号。该汽车警示装置通过向第三方发送警示信号这种被动消除盲区的方式,第三方行车人员能方便的通过观察宿主汽车的警示信号以及时采取合理的行车措施,保障了交通安全,其易拆卸式模块化设计,使整个装置结构紧凑、安装

汽车警示.docx
(转载)开车技巧,非常实用噢,大家一起分享^_^新手老手都适用一、开车技巧1、上车先看车上车前绕车转一圈,看车的外况、轮胎、车底下有没有漏油漏水。一个星期还得揭开盖子检查一次机油、冷却水、刹车油。2、点火步骤拉紧手刹(防备滑动),离合器踩到底,空档,不踩油门(加速踏板),转动钥匙到Ⅱ档后停6秒钟,让汽车电子系统上电自检,启动润滑系统,然后继续转动钥匙到Ⅲ档点火。点火成功后,挂一档、松手刹、慢抬离合、加油、出发。3、开车先热车电喷车几乎不用热车。这里热车是指启动润滑系统。停车超过3小时,发动机点着火后,怠速
汽车的避免碰撞系统及其运行方法.pdf
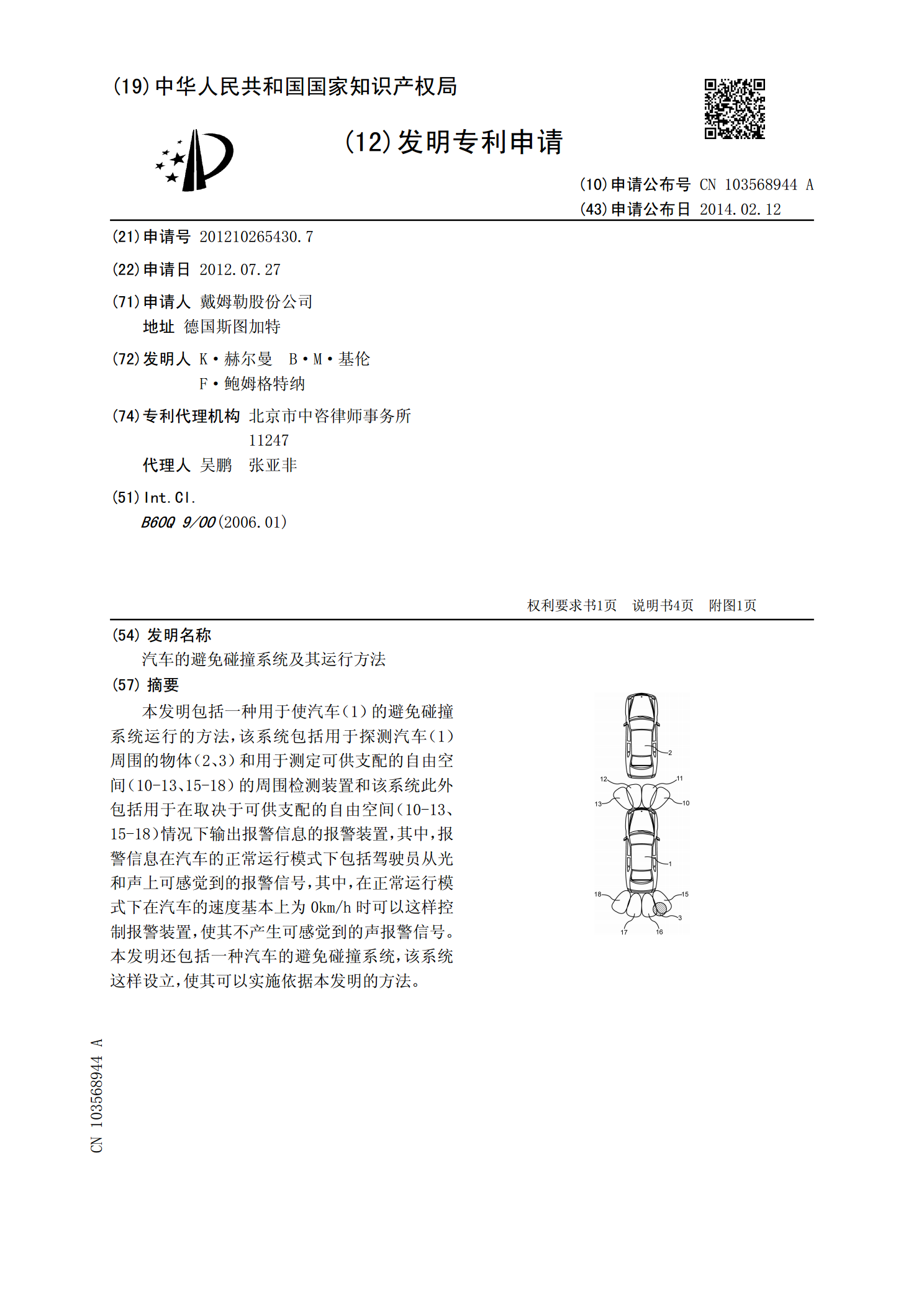
本发明包括一种用于使汽车(1)的避免碰撞系统运行的方法,该系统包括用于探测汽车(1)周围的物体(2、3)和用于测定可供支配的自由空间(10-13、15-18)的周围检测装置和该系统此外包括用于在取决于可供支配的自由空间(10-13、15-18)情况下输出报警信息的报警装置,其中,报警信息在汽车的正常运行模式下包括驾驶员从光和声上可感觉到的报警信号,其中,在正常运行模式下在汽车的速度基本上为0km/h时可以这样控制报警装置,使其不产生可感觉到的声报警信号。本发明还包括一种汽车的避免碰撞系统,该系统这样设立,
电动汽车运行状态监控方法.pdf
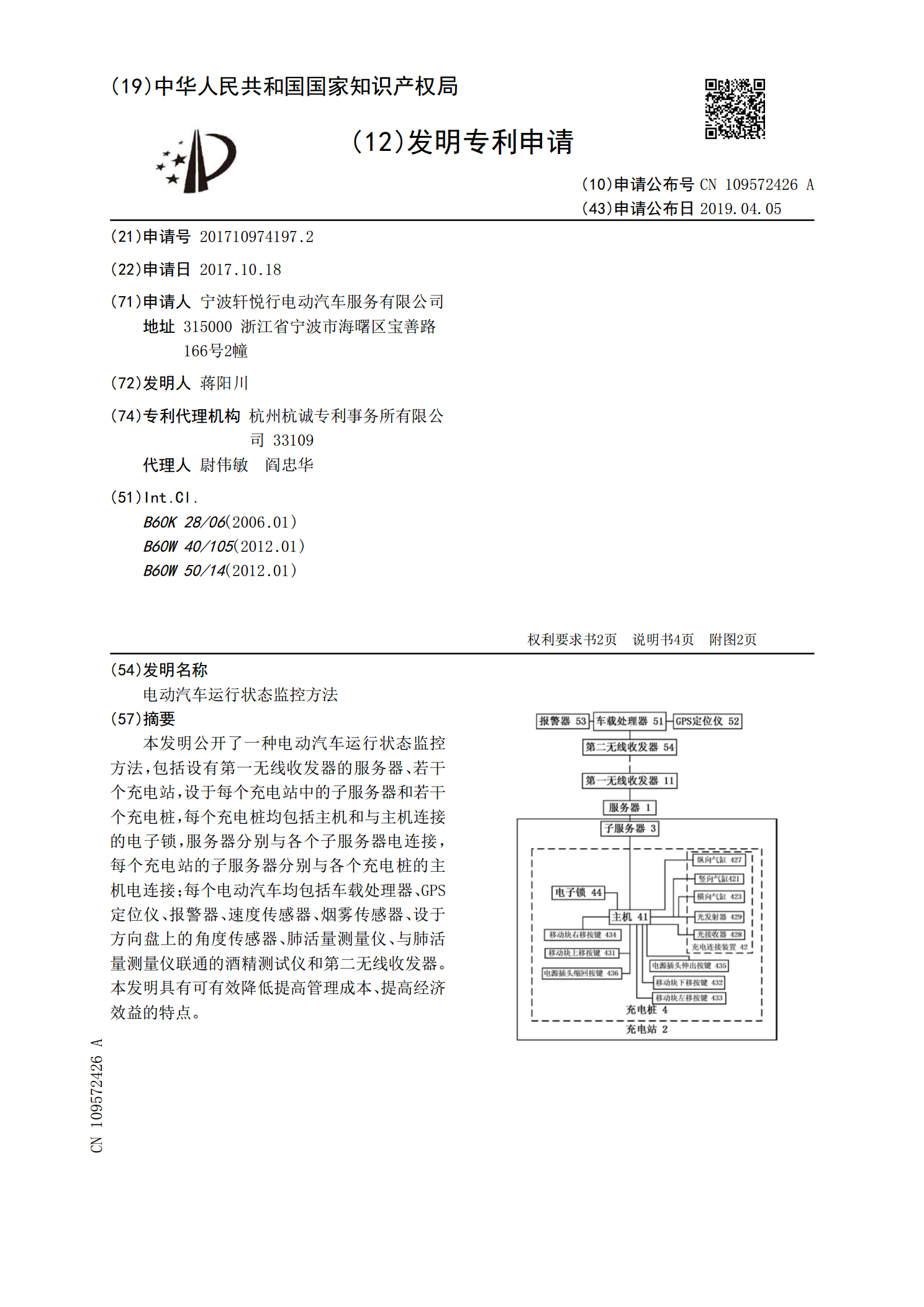
本发明公开了一种电动汽车运行状态监控方法,包括设有第一无线收发器的服务器、若干个充电站,设于每个充电站中的子服务器和若干个充电桩,每个充电桩均包括主机和与主机连接的电子锁,服务器分别与各个子服务器电连接,每个充电站的子服务器分别与各个充电桩的主机电连接;每个电动汽车均包括车载处理器、GPS定位仪、报警器、速度传感器、烟雾传感器、设于方向盘上的角度传感器、肺活量测量仪、与肺活量测量仪联通的酒精测试仪和第二无线收发器。本发明具有可有效降低提高管理成本、提高经济效益的特点。